Download as pdf or txt
You might also like
- WX-958 Instructions1Document5 pagesWX-958 Instructions1William Oliver33% (6)
- Code Examples For dsPIC30F4011Document28 pagesCode Examples For dsPIC30F4011Minh VuNo ratings yet
- Field Manual For CeedlingDocument99 pagesField Manual For Ceedlingbokic88100% (1)
- Motor Protection Against Single Phasing and OverheatingDocument14 pagesMotor Protection Against Single Phasing and OverheatingPanje DarlingtonNo ratings yet
- Usart Asm 12f1822Document3 pagesUsart Asm 12f1822Kenzo YCNo ratings yet
- Upload 15Document4 pagesUpload 15rachmat99No ratings yet
- Fixed Point Adder VerilogDocument11 pagesFixed Point Adder VerilogUday A Korat100% (1)
- MPC555Document27 pagesMPC555Mohammad Gulam AhamadNo ratings yet
- Module FIRDocument3 pagesModule FIRashik_naNo ratings yet
- Acer Aspire 7741 7741z 7741g 7741zg Emachines G730g Wistron JE70-CP Rev - 1M SCHDocument67 pagesAcer Aspire 7741 7741z 7741g 7741zg Emachines G730g Wistron JE70-CP Rev - 1M SCHWilgen GarciaNo ratings yet
- Ecen 248 Prelab 10Document2 pagesEcen 248 Prelab 10Tyron BiggumsNo ratings yet
- Assignment-3 Support FilesDocument7 pagesAssignment-3 Support FilesRahul JaiswalNo ratings yet
- 2013 BME210 HW4 SolutionDocument9 pages2013 BME210 HW4 SolutionFaraz JalilNo ratings yet
- Pic Micro Controller RS-232 Example Pic16f628Document6 pagesPic Micro Controller RS-232 Example Pic16f628Hack4KixNo ratings yet
- Code For Fruit Plucking Robot Using ATMEGA2560Document16 pagesCode For Fruit Plucking Robot Using ATMEGA2560Karthik K V Hathwar100% (2)
- msp430 Unit4Document118 pagesmsp430 Unit4hemalathaNo ratings yet
- Lorenz ArduinoDocument9 pagesLorenz ArduinoYuliyanto NugrohoNo ratings yet
- 4 CCP ModuleDocument35 pages4 CCP ModuleM.i. RehmanNo ratings yet
- Audio Player VerilogDocument12 pagesAudio Player Veriloglizhi0007No ratings yet
- LFSR Verilog CodeDocument2 pagesLFSR Verilog CodeshahebgoudahalladamaniNo ratings yet
- 74HCT74 PDFDocument7 pages74HCT74 PDFDeni KhanNo ratings yet
- RS232 FinalcodeDocument9 pagesRS232 FinalcodeAsif BuddhaNo ratings yet
- LCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Document16 pagesLCD Based Digital Alarm Clock With Digital Thermometer Using 8051 Microcontroller (AT89C51)Vishnu Vijay SNo ratings yet
- ME3241E Cheat SheetDocument2 pagesME3241E Cheat SheetLaw Zhan HongNo ratings yet
- Module SIPODocument4 pagesModule SIPOVenkatGollaNo ratings yet
- Top Module / Module DPLL (SignalIn, SignalOutDocument10 pagesTop Module / Module DPLL (SignalIn, SignalOutbigjimmNo ratings yet
- Full Adder - VHDL Code - Testbench - EDA PlaygroundDocument3 pagesFull Adder - VHDL Code - Testbench - EDA PlaygroundVicky PatilNo ratings yet
- Verilog HDL: ModuleDocument9 pagesVerilog HDL: ModuleAvinash ReddyNo ratings yet
- FSM DesignDocument61 pagesFSM DesignParesh SawantNo ratings yet
- AccuSine PCS+ PFV+ Datasheets A4Document15 pagesAccuSine PCS+ PFV+ Datasheets A4ljNo ratings yet
- Ip04 Ip08 v1.3Document6 pagesIp04 Ip08 v1.3prasad357No ratings yet
- Design Task 1 Final LabDocument15 pagesDesign Task 1 Final Labrazorblademk2No ratings yet
- Simulation On Bushed Coupling in C++Document12 pagesSimulation On Bushed Coupling in C++abhianand123No ratings yet
- Real Time Clock With Alarm Option Using AT89S52 and DS1307 ICDocument13 pagesReal Time Clock With Alarm Option Using AT89S52 and DS1307 ICkattaa1993No ratings yet
- Hamdy's Oracle IdeasDocument73 pagesHamdy's Oracle IdeasHamdy MohamedNo ratings yet
- 1 - Analog To Digital Conversion in LPC2129Document4 pages1 - Analog To Digital Conversion in LPC2129imbharteshNo ratings yet
- Asynchronous Up Counter (Verilog)Document1 pageAsynchronous Up Counter (Verilog)sindhuraNo ratings yet
- Speedo SchematicDocument1 pageSpeedo SchematicDragan Lukic100% (1)
- 8.4 A Case Study: Using LCD Module On DE2 BoardDocument19 pages8.4 A Case Study: Using LCD Module On DE2 BoardMas Shari0% (1)
- nRF24L01 Program ExampleDocument9 pagesnRF24L01 Program ExampleryantzNo ratings yet
- Program For Digital Clock Using RTC DS12C887Document12 pagesProgram For Digital Clock Using RTC DS12C887Ashish SharmaNo ratings yet
- 012 - Chapter 2 - L10Document12 pages012 - Chapter 2 - L10nanduslns07No ratings yet
- Digital Alarm Clock Using 8051Document14 pagesDigital Alarm Clock Using 8051Akshat Sinha0% (2)
- Brent Kung Adder 16 Bit Full CodeDocument8 pagesBrent Kung Adder 16 Bit Full CodeShavel Kumar100% (2)
- SWINGMEUDocument2 pagesSWINGMEUNaeem GulNo ratings yet
- Panel Method (2-D) For NACA Four, Five, Six-Digit-Airfoil Series.Document19 pagesPanel Method (2-D) For NACA Four, Five, Six-Digit-Airfoil Series.Kivanc Ali ANILNo ratings yet
- 24 LFSRDocument24 pages24 LFSRAbdul RajakNo ratings yet
- LAB 3: Binary Tree and Binary Search Tree EX1Document33 pagesLAB 3: Binary Tree and Binary Search Tree EX1Cao Minh Quang100% (1)
- DS Zadaci PDFDocument23 pagesDS Zadaci PDFArnela Tatic100% (1)
- DSP LabworkDocument10 pagesDSP Labworksachinshetty001No ratings yet
- Biostar A88pc-M3s SchematicDocument43 pagesBiostar A88pc-M3s SchematicDhe KencoesNo ratings yet
- Tech-Tutorials Pic32-Tutorials Pic32mDocument7 pagesTech-Tutorials Pic32-Tutorials Pic32mAlgoNo ratings yet
- Synchronous FIFODocument4 pagesSynchronous FIFOjayesh_1686No ratings yet
- UARTDocument34 pagesUARTMohit Dayal67% (3)
- Shuttle A14rvox A14rv08 - 71r-A14rv4-T840 - Rev A0 29abr2011 PDFDocument57 pagesShuttle A14rvox A14rv08 - 71r-A14rv4-T840 - Rev A0 29abr2011 PDFAnonymous JkUAhcRy3s67% (9)
- Lab 13Document11 pagesLab 13ubaidNo ratings yet
- CED19I032Document13 pagesCED19I032Pranavram VNo ratings yet
- STM32 RC Car (Android Control Via Bluetooth)Document9 pagesSTM32 RC Car (Android Control Via Bluetooth)winNo ratings yet
- LCDDocument4 pagesLCDPragathi P PaiNo ratings yet
- GSM Based Home AutomationDocument80 pagesGSM Based Home AutomationShashi Kant SainiNo ratings yet
- PC 5Document8 pagesPC 5Miguel RodasNo ratings yet
- Conv AdcDocument2 pagesConv AdcDulceNo ratings yet
- W5500 UDP Problem - Open Hardware - W5500 Ethernet Shield - WIZnet Developer ForumDocument8 pagesW5500 UDP Problem - Open Hardware - W5500 Ethernet Shield - WIZnet Developer Forumbokic88No ratings yet
- HAL User ManualDocument115 pagesHAL User Manualbokic88No ratings yet
- How To Manage Interrupts With Same Priority With A... - Infineon Developer CommunityDocument4 pagesHow To Manage Interrupts With Same Priority With A... - Infineon Developer Communitybokic88No ratings yet
- MPGDocument7 pagesMPGbokic88No ratings yet
- PacSci Servo Motor Selection DatasheetDocument50 pagesPacSci Servo Motor Selection Datasheetbokic88No ratings yet
- PacSci Servo Motor Mounting Dimensions ManualDocument10 pagesPacSci Servo Motor Mounting Dimensions Manualbokic88No ratings yet
- Electronics 08 00030Document17 pagesElectronics 08 00030bokic88No ratings yet
- Beko dfn2530 SCHDocument2 pagesBeko dfn2530 SCHbokic88No ratings yet
- Sliding Mode Controller Design For Controlling The Speed of A DC MotorDocument5 pagesSliding Mode Controller Design For Controlling The Speed of A DC Motorbokic88No ratings yet
- AN2002 Application Note: Using The Demoboard For The TD350 Advanced IGBT DriverDocument8 pagesAN2002 Application Note: Using The Demoboard For The TD350 Advanced IGBT Driverbokic88No ratings yet
- Advanced IGBT/MOSFET Driver: ApplicationsDocument18 pagesAdvanced IGBT/MOSFET Driver: Applicationsbokic88No ratings yet
- Tie Rod Cylinders, Series TRB: 32-100 MM Dia., Double-Acting, Cushioning, Proximity SwitchingDocument1 pageTie Rod Cylinders, Series TRB: 32-100 MM Dia., Double-Acting, Cushioning, Proximity Switchingbokic88No ratings yet
- TL431 Shunt Regulator CircuitDocument7 pagesTL431 Shunt Regulator Circuitbokic88No ratings yet
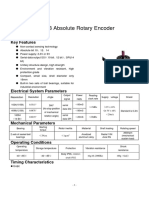
- HAE18 Absolute Rotary Encoder: Key FeaturesDocument4 pagesHAE18 Absolute Rotary Encoder: Key Featuresbokic88No ratings yet
- Phoenix Contacts Mcr-Adc 12 Adc ConvertersDocument2 pagesPhoenix Contacts Mcr-Adc 12 Adc Convertersbokic88No ratings yet
- Data Sheet For Angle Sensors: Optical Encoders Series MHL40Document6 pagesData Sheet For Angle Sensors: Optical Encoders Series MHL40bokic88No ratings yet
- Pricelist - Novembe R 2010Document86 pagesPricelist - Novembe R 2010garamundaNo ratings yet
- LT1083 Power Supply Regulated 7Document3 pagesLT1083 Power Supply Regulated 7Collie de KloeNo ratings yet
- Chapter 2Document41 pagesChapter 2sitiNo ratings yet
- NOTES Mod6Document16 pagesNOTES Mod6eeetistNo ratings yet
- Megger Impulse GeneratorsDocument4 pagesMegger Impulse GeneratorsFire NowNo ratings yet
- Earthing SwitchDocument2 pagesEarthing SwitchAnonymous 2feRXsn30No ratings yet
- Electrical MachinesDocument82 pagesElectrical Machinessanthosiyal751No ratings yet
- TURK SPLITTErDocument2 pagesTURK SPLITTErTruong Anh TuanNo ratings yet
- Multifunction Power Supply For Embedded SystemDocument16 pagesMultifunction Power Supply For Embedded SystemPrabhat PatelNo ratings yet
- Soundoff Led Flasher ManualDocument2 pagesSoundoff Led Flasher ManualDaniel BonillaNo ratings yet
- 180904Document2 pages180904Palak AriwalaNo ratings yet
- DET40073 - Topic 5Document98 pagesDET40073 - Topic 5KuhaanProNo ratings yet
- Guide in Reading MCB RatingDocument1 pageGuide in Reading MCB RatingKing Duq100% (1)
- BOQ-Substation - East West Hospital - AshuliaDhakaDocument82 pagesBOQ-Substation - East West Hospital - AshuliaDhakanisargo100% (2)
- Comment Insulation Resistance (IR) Values - Electrical Notes & ArticlesDocument41 pagesComment Insulation Resistance (IR) Values - Electrical Notes & ArticlesMunazar HussainNo ratings yet
- Vlsi / Cmos W/L RatioDocument20 pagesVlsi / Cmos W/L Ratiodipankar_nath07No ratings yet
- Rf/Rfs & RL/RLS: Class HDocument2 pagesRf/Rfs & RL/RLS: Class HFrank SemenukNo ratings yet
- Assembly Kits For 3VA Molded Case Circuit Breakers SIVACON S4 201612151418084694Document28 pagesAssembly Kits For 3VA Molded Case Circuit Breakers SIVACON S4 201612151418084694cc_bauNo ratings yet
- NTPC Intern ReportDocument13 pagesNTPC Intern ReportRoshan KumarNo ratings yet
- PD ManualDocument17 pagesPD ManualMURTHYNo ratings yet
- Celdas Abb Sf6 Zx1.2Document50 pagesCeldas Abb Sf6 Zx1.2Luis Picon Garcia100% (1)
- SI306-F016 Lighting and Receptacles Installation ChecklistDocument1 pageSI306-F016 Lighting and Receptacles Installation ChecklistBrookeNo ratings yet
- 8024 Datasheet - Scout USBL TransceiverDocument1 page8024 Datasheet - Scout USBL TransceiverRully PieritszNo ratings yet
- Lab Questions On PhotodiodeDocument4 pagesLab Questions On PhotodiodeAngamuthu Ananth100% (3)
- P-N Junction Diode and Zener DiodeDocument34 pagesP-N Junction Diode and Zener DiodeHafie Jay100% (1)
- CA908066E Elcb UseDocument64 pagesCA908066E Elcb UseAmandeep Singh BhathalNo ratings yet
- 18N50Document8 pages18N50Majid AliNo ratings yet
- ABB Elbows PDFDocument116 pagesABB Elbows PDFmojsic6313No ratings yet
- Thank You For Downloading PPL Electric Utilities' (PPL EU) Application For Electric ServiceDocument7 pagesThank You For Downloading PPL Electric Utilities' (PPL EU) Application For Electric ServiceAsghar AliNo ratings yet