Download as pdf or txt
You might also like
- Automated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsFrom EverandAutomated Broad and Narrow Band Impedance Matching for RF and Microwave CircuitsNo ratings yet
- STARLINE MBV3 1 GHZ Mini-Bridger Amplifier Installation and Operation ManualDocument72 pagesSTARLINE MBV3 1 GHZ Mini-Bridger Amplifier Installation and Operation ManualLadyNo ratings yet
- Watercraft Stealth TechnologyDocument25 pagesWatercraft Stealth TechnologyJackelyn BautistaNo ratings yet
- A Higher Order Topology For Interpolative Modulators For Oversampling A D ConvertersDocument10 pagesA Higher Order Topology For Interpolative Modulators For Oversampling A D Convertersalan3421407No ratings yet
- An Economical Class of Digital Filters For Decimation and InterpolationDocument9 pagesAn Economical Class of Digital Filters For Decimation and Interpolationaswesee asweseeNo ratings yet
- Shanthi Pavan - CT Audio DSM With FIR - JSSC 2014Document11 pagesShanthi Pavan - CT Audio DSM With FIR - JSSC 2014Saleh Heidary ShalmanyNo ratings yet
- Xilinx Implementation of Pulse Width Modulation Generation Using FpgaDocument5 pagesXilinx Implementation of Pulse Width Modulation Generation Using FpgawigaYeHtetNo ratings yet
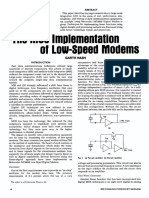
- The Mos of Low-Sdeed: ImdlementationDocument3 pagesThe Mos of Low-Sdeed: ImdlementationJesusAlbertNo ratings yet
- Bandpass Continuous-Time Delta-Sigma Modulator For Wireless Receiver ICDocument4 pagesBandpass Continuous-Time Delta-Sigma Modulator For Wireless Receiver ICBalthier8745No ratings yet
- 16-Bit Delta-Sigma DAC With Cascade-Of-Resonators Feed-Forward Modulator and Interpolation Filter With OCSD CodeDocument4 pages16-Bit Delta-Sigma DAC With Cascade-Of-Resonators Feed-Forward Modulator and Interpolation Filter With OCSD Codealan3421407No ratings yet
- 01284742Document13 pages01284742Anonymous OmAb32IfNo ratings yet
- DAC-based M-Ary QAM CoherentTransmitterDocument11 pagesDAC-based M-Ary QAM CoherentTransmitterweromNo ratings yet
- A Review Report On Multi-Voltage Rule Check - HBRP PublicationDocument11 pagesA Review Report On Multi-Voltage Rule Check - HBRP PublicationSaisantosh RajputhNo ratings yet
- A Scaling-Friendly Low-Power Small-Area DeltaSigma ADC With VCO-Based Integrator and Intrinsic Mismatch Shaping CapabilityDocument13 pagesA Scaling-Friendly Low-Power Small-Area DeltaSigma ADC With VCO-Based Integrator and Intrinsic Mismatch Shaping Capabilitysiraporn sakphromNo ratings yet
- High-Performance 8-Bit Modulator Used For Sigma-Delta Analog To Digital ConverterDocument7 pagesHigh-Performance 8-Bit Modulator Used For Sigma-Delta Analog To Digital ConverterAmeya DeshpandeNo ratings yet
- An Integrated I-Q Mixer For Software-Defined Radio ApplicationsDocument5 pagesAn Integrated I-Q Mixer For Software-Defined Radio Applicationsarunkr1No ratings yet
- Adpll JSSC 2007Document11 pagesAdpll JSSC 2007陳育楷No ratings yet
- Imp - Delta Sigma WooleyDocument52 pagesImp - Delta Sigma WooleySourav ChakrabortyNo ratings yet
- A Compact Low-Power Decimation Filter Sigma Delta ModulatorsDocument4 pagesA Compact Low-Power Decimation Filter Sigma Delta ModulatorsmikeNo ratings yet
- A Digital Clock and Data Recovery Architecture ForDocument10 pagesA Digital Clock and Data Recovery Architecture ForHassan KhaledNo ratings yet
- A Distributed Filter Within A Switching Converter For Application To 3-D Integrated CircuitsDocument11 pagesA Distributed Filter Within A Switching Converter For Application To 3-D Integrated CircuitsDaniel zanelattoNo ratings yet
- CETCME-2020 - NIET - Vineet ShekherDocument9 pagesCETCME-2020 - NIET - Vineet Shekherडाँ सूर्यदेव चौधरीNo ratings yet
- High Speed & Low Power Comparator Using Double-Gate MOSFET Scalable To 20nmDocument5 pagesHigh Speed & Low Power Comparator Using Double-Gate MOSFET Scalable To 20nmSupriya Tenny SamNo ratings yet
- Paper Publish 1 PDFDocument5 pagesPaper Publish 1 PDFSupriya Tenny SamNo ratings yet
- Low Power Implementation of Sigma Delta ModulatorDocument5 pagesLow Power Implementation of Sigma Delta ModulatorSatish BojjawarNo ratings yet
- DSP Engine For Ultra-Low-Power Audio Applications: Slink4 (32Document4 pagesDSP Engine For Ultra-Low-Power Audio Applications: Slink4 (32kamelNo ratings yet
- Full Custom Design Flow For A Transimpedance Amplifier Using Cadence VirtuosoDocument6 pagesFull Custom Design Flow For A Transimpedance Amplifier Using Cadence VirtuosoRajasekar PanneerselvamNo ratings yet
- Paper 20Document4 pagesPaper 20Mohamed AhmiedNo ratings yet
- On Chopper EffectsDocument12 pagesOn Chopper Effectskijiji userNo ratings yet
- Key-Words: DDFS, Direct-Digital Frequency Synthesizer, Nonuniform SegmentationDocument68 pagesKey-Words: DDFS, Direct-Digital Frequency Synthesizer, Nonuniform SegmentationKarthik MohanNo ratings yet
- pett_1999Document4 pagespett_1999Mumuji BirbNo ratings yet
- 04-RF Electronics Kikkert Ch2 SimulationDocument17 pages04-RF Electronics Kikkert Ch2 SimulationSreejith JayachandranNo ratings yet
- Bit-Level Optimization of Adder-TreesDocument49 pagesBit-Level Optimization of Adder-TreesRatnakarVarunNo ratings yet
- Least Mean Square (LMS) Adaptive Line Enhancer (ALE) Design in VHDLDocument7 pagesLeast Mean Square (LMS) Adaptive Line Enhancer (ALE) Design in VHDLrogiebone11No ratings yet
- Cmos Inverter As A ComparatorDocument5 pagesCmos Inverter As A ComparatorAnonymous TPVfFif6TONo ratings yet
- A Low-Power and High-Speed Frequency Multiplier For DLL-Based Clock GeneratorDocument7 pagesA Low-Power and High-Speed Frequency Multiplier For DLL-Based Clock GeneratorEditor IJRITCCNo ratings yet
- Bandwidth Extension in CMOS With Optimized On-Chip InductorsDocument10 pagesBandwidth Extension in CMOS With Optimized On-Chip InductorsAlex WongNo ratings yet
- Fully Integrated CMOS Fractional-N Frequency Divider For Wide-Band Mobile Applications With Spurs ReductionDocument9 pagesFully Integrated CMOS Fractional-N Frequency Divider For Wide-Band Mobile Applications With Spurs ReductionGoran WnisNo ratings yet
- Realization of A Compact Reconfigurable Antenna For Mobile CommunicationsDocument4 pagesRealization of A Compact Reconfigurable Antenna For Mobile CommunicationsyenifferNo ratings yet
- Nested-Current-Mirror Rail-to-Rail-Output Single-Stage Amplifier With Enhancements of DC Gain, GBW and Slew RateDocument14 pagesNested-Current-Mirror Rail-to-Rail-Output Single-Stage Amplifier With Enhancements of DC Gain, GBW and Slew Rateian neymarNo ratings yet
- Design of All Digital Phase Locked Loop For WireleDocument5 pagesDesign of All Digital Phase Locked Loop For WireleKiran SomayajiNo ratings yet
- A 09-V Input Discontinuous-Conduction-Mode Boost CDocument12 pagesA 09-V Input Discontinuous-Conduction-Mode Boost CDanial RazaNo ratings yet
- DC Report - 486,487,488Document13 pagesDC Report - 486,487,488Anvesh MagantiNo ratings yet
- 07ATT00158Document7 pages07ATT00158Swastik guptaNo ratings yet
- A 5.7-Ghz Low-Noise AmplifierDocument4 pagesA 5.7-Ghz Low-Noise AmplifierHoracio Dorantes ReyesNo ratings yet
- A Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingDocument6 pagesA Low Voltage All Digital On Chip Oscillator Using Relative Reference ModelingShruti KalraNo ratings yet
- Distributed Analog Phase Shifters With Low Insertion Loss: Amit S. Nagra,, and Robert A. YorkDocument7 pagesDistributed Analog Phase Shifters With Low Insertion Loss: Amit S. Nagra,, and Robert A. Yorkamirnader4No ratings yet
- Design and Simulation of Digital Down Converter Based On System GeneratorDocument3 pagesDesign and Simulation of Digital Down Converter Based On System GeneratorMayerly MayorgaNo ratings yet
- A 1-V Programmable DSP For Wireless CommunicationsDocument11 pagesA 1-V Programmable DSP For Wireless CommunicationssciwanderNo ratings yet
- Efficient Adaptive Hold Logic Reliable Multiplier Using Variable Latency DesignDocument4 pagesEfficient Adaptive Hold Logic Reliable Multiplier Using Variable Latency DesignerpublicationNo ratings yet
- A Simple Frequency Reconfigurable Microstrip Patch Antenna For Wireless CommunicationDocument5 pagesA Simple Frequency Reconfigurable Microstrip Patch Antenna For Wireless CommunicationMes TAREKNo ratings yet
- JTS Sonntag Stonick CDRDocument8 pagesJTS Sonntag Stonick CDRAram ShishmanyanNo ratings yet
- Balika I 2020Document15 pagesBalika I 2020Kiran SomayajiNo ratings yet
- Kundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and ActiveDocument12 pagesKundu Et Al - 2019 - A Fully Integrated Digital LDO With Built-In Adaptive Sampling and Active马晓飞No ratings yet
- Predistortion For Wideband Nonlinear Satellite DownlinksDocument4 pagesPredistortion For Wideband Nonlinear Satellite DownlinksNguyen Anh DucNo ratings yet
- High-Performance NMOS Operational Amplifier: IEEE Journal of Solid-State Circuits January 1979Document8 pagesHigh-Performance NMOS Operational Amplifier: IEEE Journal of Solid-State Circuits January 1979Ac Logic GP1No ratings yet
- Low Power Dissipation in Johnson Counter Using DFAL TechniqueDocument4 pagesLow Power Dissipation in Johnson Counter Using DFAL TechniqueEditor IJRITCCNo ratings yet
- Shanthi Pavan - Chopped CT DSM, Unified Theory - TCAS 2019Document12 pagesShanthi Pavan - Chopped CT DSM, Unified Theory - TCAS 2019Saleh Heidary ShalmanyNo ratings yet
- W2023Document11 pagesW2023Miki ArsovskiNo ratings yet
- ExploitingMultipathLowComplexityEqualis Kaya IEEE VTCDocument6 pagesExploitingMultipathLowComplexityEqualis Kaya IEEE VTCJamil AhmadNo ratings yet
- High-Performance D/A-Converters: Application to Digital TransceiversFrom EverandHigh-Performance D/A-Converters: Application to Digital TransceiversNo ratings yet
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Webinar MIMO Below 6Document27 pagesWebinar MIMO Below 6Jafar HussainNo ratings yet
- Curriculum: Gul NazDocument2 pagesCurriculum: Gul NazJafar HussainNo ratings yet
- Muhammad Jawad Shakil 20i-1316: Lab TutorialDocument10 pagesMuhammad Jawad Shakil 20i-1316: Lab TutorialJafar HussainNo ratings yet
- Muhammad Jawad Shakil 20i-1316: Lab TutorialDocument10 pagesMuhammad Jawad Shakil 20i-1316: Lab TutorialJafar HussainNo ratings yet
- Account Activity Generated Through HBL Internet BankingDocument1 pageAccount Activity Generated Through HBL Internet BankingJafar HussainNo ratings yet
- Mil STD 348aDocument105 pagesMil STD 348aGaurang DaveNo ratings yet
- Wadb (Bmu) - Sultan Muhammad SalahuddinDocument4 pagesWadb (Bmu) - Sultan Muhammad SalahuddinGETA CHANNELNo ratings yet
- Manual Alarma PiletaDocument15 pagesManual Alarma PiletaSoporte Técnico Tienda OnlyNo ratings yet
- ASI4518R54v06: Antenna SpecificationsDocument4 pagesASI4518R54v06: Antenna SpecificationsB.R.J TestNo ratings yet
- Philippine TV & Radio Schedules 2018 EditionDocument3,027 pagesPhilippine TV & Radio Schedules 2018 EditionPcnhs SalNo ratings yet
- 01e10 - The Dalek Invasion of EarthDocument76 pages01e10 - The Dalek Invasion of Earthcarl crespoNo ratings yet
- Design and Performance of Wearable Ultrawide Band Textile Antenna For Medical ApplicationsDocument6 pagesDesign and Performance of Wearable Ultrawide Band Textile Antenna For Medical ApplicationsNitin Suyan PanchalNo ratings yet
- Class C AmplifierDocument14 pagesClass C AmplifierSuresh Kumar SubbiahNo ratings yet
- Mychway EXW Prices20200312Document50 pagesMychway EXW Prices20200312hvwwtf2sbbNo ratings yet
- Fiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionDocument25 pagesFiber Optic Communications Fiber Optic Communications: EE4367 Telecom. Switching & TransmissionnhatvpNo ratings yet
- Alpine PDR-V75 AmpDocument44 pagesAlpine PDR-V75 AmpKamerom CunninghamNo ratings yet
- IBS PlanningDocument29 pagesIBS Planningabhaykumar80100% (1)
- DSP-5-Unit-Multirate SP NotesDocument15 pagesDSP-5-Unit-Multirate SP NotesR MuruganNo ratings yet
- List of Aviation AbbreviationsDocument17 pagesList of Aviation AbbreviationsGrzegorz PiasecznyNo ratings yet
- Fr1500mk3 Series Service Manual BDocument138 pagesFr1500mk3 Series Service Manual Bmod denizenNo ratings yet
- Catalog Navigate NewDocument27 pagesCatalog Navigate NewHanifa RamadhaniNo ratings yet
- IR Nterface: By: W EDocument19 pagesIR Nterface: By: W EabdallahNo ratings yet
- Patent No. US3393279 NERVOUS SYSTEM EXCITATION DEVICE by Gillis Patrick FlanaganDocument4 pagesPatent No. US3393279 NERVOUS SYSTEM EXCITATION DEVICE by Gillis Patrick Flanaganpepixx985No ratings yet
- 5 6Document12 pages5 6Jacie Tupas100% (1)
- D202466-18 UJF-3042HG, 6042 OperationManual eDocument160 pagesD202466-18 UJF-3042HG, 6042 OperationManual eAzure FistNo ratings yet
- Software Defined Radio Handbook (Hosking R.H.)Document45 pagesSoftware Defined Radio Handbook (Hosking R.H.)HEIN HTET ZAWNo ratings yet
- Sony - SRF t615 FMDocument16 pagesSony - SRF t615 FMpindurs1No ratings yet
- C4505 Deh-4250sd, Deh-4290sd, Deh-3200ubDocument82 pagesC4505 Deh-4250sd, Deh-4290sd, Deh-3200ubW_JaimesNo ratings yet
- Walkie TalkieDocument1 pageWalkie Talkieelif シNo ratings yet
- Dtma-Umts-12-Aisg-Cwa: Fullband Double Dual Duplex Tower Mounted Amplifi Er (Masthead Amplifi Er)Document1 pageDtma-Umts-12-Aisg-Cwa: Fullband Double Dual Duplex Tower Mounted Amplifi Er (Masthead Amplifi Er)Vincent SARDANo ratings yet
- V 01Document2 pagesV 01WilliamLawnsonsNo ratings yet
- Amplitude ModulationDocument17 pagesAmplitude ModulationAviee AliwalasNo ratings yet
- Manual BTECH UV25x2Document92 pagesManual BTECH UV25x2Belkis RestituyoNo ratings yet