Download as pdf or txt
You might also like
- CribMaster 11 Features - User GuideDocument22 pagesCribMaster 11 Features - User GuidesalurkarNo ratings yet
- 66 Job Interview Questions For Data ScientistsDocument10 pages66 Job Interview Questions For Data ScientistsRavi RanjanNo ratings yet
- Investment AgreementDocument2 pagesInvestment AgreementNaif Omar100% (1)
- Oral Notes Rupesh PillaiDocument172 pagesOral Notes Rupesh PillaiRachit100% (4)
- 1MRB520176 Ben RIO580Document20 pages1MRB520176 Ben RIO580alimaghamiNo ratings yet
- 2nd ODE NON HOMODocument37 pages2nd ODE NON HOMOMuhammad Hazim Bin Ahmad FauziNo ratings yet
- 1st 100%Document7 pages1st 100%RamsanathvedhuNo ratings yet
- 2.6.finite Difference For ODEDocument14 pages2.6.finite Difference For ODElil GoshNo ratings yet
- Rotational Motion 3Document59 pagesRotational Motion 3anyone1018ghoshNo ratings yet
- Lab 5 - Analysis of Deflection Under Transverse Loading (Simply Supported Beam)Document8 pagesLab 5 - Analysis of Deflection Under Transverse Loading (Simply Supported Beam)Mohib ShareefNo ratings yet
- TST1501 - S2 - Major Test 1 - 2023Document5 pagesTST1501 - S2 - Major Test 1 - 2023Rachel Du Preez100% (1)
- Moment Frame TheoryDocument9 pagesMoment Frame TheoryRiki AnggriawanNo ratings yet
- Modeling A Beam (I) Analysis With Pro/Mechanica StructureDocument55 pagesModeling A Beam (I) Analysis With Pro/Mechanica StructureakinojohnkennedyNo ratings yet
- Section 3.1 ExamplesDocument4 pagesSection 3.1 Examplessep10boyNo ratings yet
- Chapter 2. Laminate Theory 9Document26 pagesChapter 2. Laminate Theory 9techctrlNo ratings yet
- Tutorial Week9 Method of Matrix by ShiweiDocument25 pagesTutorial Week9 Method of Matrix by ShiweiMithun KanishkaNo ratings yet
- CH 03Document8 pagesCH 03Carlos RogerioNo ratings yet
- Output PremitivesDocument29 pagesOutput PremitivesIT Department HODNo ratings yet
- S5-Math-Algebra-and-Calculus-NotesDocument2 pagesS5-Math-Algebra-and-Calculus-NotesmuwanguziisalNo ratings yet
- 4 - BeamsDocument21 pages4 - BeamsdhgrfrhkwuibfwdlrxNo ratings yet
- GJ GJ K K L L I MR I MR K I I KG M K N M Radian I K: and - 1 1 and - 2 2 10 and 0.2, and 4000Document7 pagesGJ GJ K K L L I MR I MR K I I KG M K N M Radian I K: and - 1 1 and - 2 2 10 and 0.2, and 4000João Vitor Nascimento PereiraNo ratings yet
- Problem Sheet 1Document5 pagesProblem Sheet 1Divyanshu KumarNo ratings yet
- ESLA Mod5Document221 pagesESLA Mod51MV19EC072Nikita S PaiNo ratings yet
- Chapter 4 Multiple Degree of Freedom SystemsDocument177 pagesChapter 4 Multiple Degree of Freedom Systemsmenna ahmed ebrahemNo ratings yet
- Flexibility Matrix Method System ApproachDocument16 pagesFlexibility Matrix Method System Approachujjwalsingh8509No ratings yet
- Finite Element Method: Plane and Axisymmetric Elastic ProblemsDocument55 pagesFinite Element Method: Plane and Axisymmetric Elastic ProblemsHalef Michel Bou KarimNo ratings yet
- Ch3 DeterminantsDocument76 pagesCh3 Determinants陳品涵No ratings yet
- Modal Mass IDocument41 pagesModal Mass Ivodugu123No ratings yet
- Paper - Ii Mathematical Sciences: Note: Attempt All The Questions. Each Question Carries Two (2) MarksDocument14 pagesPaper - Ii Mathematical Sciences: Note: Attempt All The Questions. Each Question Carries Two (2) Marksசெபா செல்வாNo ratings yet
- New Trend Sample QuestionDocument32 pagesNew Trend Sample QuestionWilliam TsuiNo ratings yet
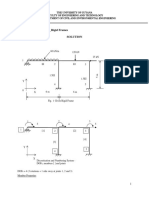
- Rigid Frame Example4 SolutionDocument5 pagesRigid Frame Example4 SolutionMark Sage PercivalNo ratings yet
- Interpol v6Document8 pagesInterpol v6Kyungyong LeeNo ratings yet
- Mws Gen Ode Spe FinitedifDocument14 pagesMws Gen Ode Spe FinitedifMuhammad ShamutNo ratings yet
- Basic Maths & VectorsDocument10 pagesBasic Maths & Vectorskarthi karthiNo ratings yet
- Matrix Method - BeamDocument5 pagesMatrix Method - BeamMAGED MOHMMED AHMED QASEMNo ratings yet
- Inc Xii Solutions - 03.09.2022Document15 pagesInc Xii Solutions - 03.09.2022KharnikaNo ratings yet
- Statement:: PROBLEM 2-35Document1 pageStatement:: PROBLEM 2-35GUSTAVO VINICIUS VIEIRA MELLONo ratings yet
- Fan Lijiang, Yangguofeng, Xue Bin, Du Jia, Li ShudongDocument8 pagesFan Lijiang, Yangguofeng, Xue Bin, Du Jia, Li ShudongRiyan FebriansyahNo ratings yet
- Continuous Beams Structural AnalysisDocument18 pagesContinuous Beams Structural AnalysisRicardo EspinosaNo ratings yet
- Continuous Beams: I. Method of ForcesDocument18 pagesContinuous Beams: I. Method of ForcesIbrahim SaeedNo ratings yet
- Sheet 2Document2 pagesSheet 2Chandan GuptaNo ratings yet
- UntitledDocument32 pagesUntitledMantajul SkNo ratings yet
- Lab 05 Moments of Inertia - enDocument10 pagesLab 05 Moments of Inertia - enubaidnazir45198No ratings yet
- Modeling A Beam (I) Analysis With Pro/Mechanica StructureDocument55 pagesModeling A Beam (I) Analysis With Pro/Mechanica Structurerace egrNo ratings yet
- Discussion and Answer Topic 6Document8 pagesDiscussion and Answer Topic 6Hazlina ZaiyunanNo ratings yet
- Elastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignDocument45 pagesElastic Buckling Behavior of Beams: CE579 - Structural Stability and DesignjcpolicarpiNo ratings yet
- ElasticityDocument17 pagesElasticitybenyfirstNo ratings yet
- ParabolaDocument3 pagesParabolaSuresh ChNo ratings yet
- Clase 10 Calculo Numerico IDocument26 pagesClase 10 Calculo Numerico ICarlos AlmanzaNo ratings yet
- PHYS 560: Assignment 6: SOLUTIONS: Martin J. Savage December 18, 2009Document8 pagesPHYS 560: Assignment 6: SOLUTIONS: Martin J. Savage December 18, 2009amallia nadhiaratnaNo ratings yet
- Dynamics of Cracked BeamsDocument4 pagesDynamics of Cracked BeamsPrakash InturiNo ratings yet
- BLD 401 - Module 1Document16 pagesBLD 401 - Module 1Ijadunola John BelovedNo ratings yet
- Stiffness of Pre Stressed Frameworks by GuestDocument14 pagesStiffness of Pre Stressed Frameworks by GuestTensegrity WikiNo ratings yet
- Solution MultivariateDocument12 pagesSolution Multivariatenurul aeni kulsumNo ratings yet
- A.4 Beam ProblemDocument5 pagesA.4 Beam ProblemKld MntNo ratings yet
- Basic MathematicsDocument9 pagesBasic MathematicsSarthak ShingareNo ratings yet
- Dynamics of Structures Apuntes PDFDocument112 pagesDynamics of Structures Apuntes PDFHero Djoni SNo ratings yet
- Chapter 1Document9 pagesChapter 1shedat_utopian872941No ratings yet
- Physics PyqsDocument6 pagesPhysics Pyqsnaziyaparveen20077No ratings yet
- CP3 Notes - Toby AdkinsDocument57 pagesCP3 Notes - Toby AdkinsJames ConnaughtonNo ratings yet
- Mathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsFrom EverandMathematics 1St First Order Linear Differential Equations 2Nd Second Order Linear Differential Equations Laplace Fourier Bessel MathematicsNo ratings yet
- TIme Sheet. 1Document1 pageTIme Sheet. 1Israel PopeNo ratings yet
- Writing The Results Section For A Research PaperDocument7 pagesWriting The Results Section For A Research PaperIsrael PopeNo ratings yet
- GSa7JR Document Form I Individual Income Tax Return 2019Document22 pagesGSa7JR Document Form I Individual Income Tax Return 2019Israel PopeNo ratings yet
- Form - COC - Application Filed 7-2-2022Document4 pagesForm - COC - Application Filed 7-2-2022Israel PopeNo ratings yet
- May 4, 2021 - Wk.11 Completing The Research ReportDocument49 pagesMay 4, 2021 - Wk.11 Completing The Research ReportIsrael PopeNo ratings yet
- Week 9-Stat Data ProcessingDocument23 pagesWeek 9-Stat Data ProcessingIsrael PopeNo ratings yet
- 2008-La301-Method of Data Analysis-Stds ServerDocument8 pages2008-La301-Method of Data Analysis-Stds ServerIsrael PopeNo ratings yet
- 2008 La301.Data Ana Ysis Mr. ShadlowDocument3 pages2008 La301.Data Ana Ysis Mr. ShadlowIsrael PopeNo ratings yet
- Questionnaires & Interviews: Su R Vey R Esear CHDocument33 pagesQuestionnaires & Interviews: Su R Vey R Esear CHIsrael PopeNo ratings yet
- SAP S/4HANA Supply Chain For Transportation Management 1809Document73 pagesSAP S/4HANA Supply Chain For Transportation Management 1809trishqNo ratings yet
- Notice of Meeting-1st MDC Ldip Alignment Meeting & WsDocument5 pagesNotice of Meeting-1st MDC Ldip Alignment Meeting & WsByaheng CawayanNo ratings yet
- IMS JRDocument4 pagesIMS JRRyoNo ratings yet
- TRIDENT - Request For ProposalDocument81 pagesTRIDENT - Request For ProposalPrince Mittal0% (1)
- Koolaire - A KDT Manual PDFDocument192 pagesKoolaire - A KDT Manual PDFjulioNo ratings yet
- Guidelines - In-Hospital ResuscitationDocument18 pagesGuidelines - In-Hospital ResuscitationparuNo ratings yet
- 001 2012 4 b-3Document114 pages001 2012 4 b-3dikahunguNo ratings yet
- Dynamic Simulation of A Crude Oil DistillationDocument14 pagesDynamic Simulation of A Crude Oil DistillationAL-JABERI SADEQ AMEEN ABDO / UPMNo ratings yet
- Internship ReportDocument61 pagesInternship ReportAheen ImtiazNo ratings yet
- AWS Well Architected FrameworkDocument30 pagesAWS Well Architected FrameworkkichnaNo ratings yet
- Assignment 2-Groundwater MovementDocument2 pagesAssignment 2-Groundwater MovementPhước LêNo ratings yet
- Allie Brown: Southern Paws Pet Grooming, Cordele, GA. - BatherDocument2 pagesAllie Brown: Southern Paws Pet Grooming, Cordele, GA. - Batherapi-548153301No ratings yet
- 3 Simpson Wickelgren (2007) Naked Exclusion Efficient Breach and Downstream Competition1Document10 pages3 Simpson Wickelgren (2007) Naked Exclusion Efficient Breach and Downstream Competition1211257No ratings yet
- Design and BuildDocument16 pagesDesign and BuildBernard DavidNo ratings yet
- Justification For Base Resistance FormulaDocument110 pagesJustification For Base Resistance FormulaKS ChongNo ratings yet
- Amendment of Information, Formal Vs SubstantialDocument2 pagesAmendment of Information, Formal Vs SubstantialNikkoCataquiz100% (3)
- Legal Forms - Partnership and CorporationDocument35 pagesLegal Forms - Partnership and CorporationLenNo ratings yet
- Exam Preparation Chartered Member Solutions 20080403Document36 pagesExam Preparation Chartered Member Solutions 20080403Jordy NgNo ratings yet
- Tri 21 DMP 002Document3 pagesTri 21 DMP 002adi sihombingNo ratings yet
- AC ResidentialDocument18 pagesAC ResidentialHiten VadkareNo ratings yet
- Material Safety Data Sheet: J218 Breaker J218Document8 pagesMaterial Safety Data Sheet: J218 Breaker J218sajad gohariNo ratings yet
- Lesson 10b: Aggregate Planning Finding An Optimal Production Plan Using Excel SolverDocument7 pagesLesson 10b: Aggregate Planning Finding An Optimal Production Plan Using Excel SolvervaraduNo ratings yet
- Bearing Supports-1Document145 pagesBearing Supports-1Papaleguas gamesNo ratings yet
- D D D D D D D D D: DescriptionDocument34 pagesD D D D D D D D D: DescriptionSukandar TeaNo ratings yet
- Pdms List Error CaptureDocument4 pagesPdms List Error Capturehnguyen_698971No ratings yet