Download as pdf or txt
You might also like
- Olver PDE Student Solutions ManualDocument63 pagesOlver PDE Student Solutions ManualKhaled Tamimy50% (2)
- Answers To Selected Exercise Problems StrogatzDocument9 pagesAnswers To Selected Exercise Problems StrogatzbalterNo ratings yet
- (Ebook PDF) Handbook of Dam EngineeringDocument1 page(Ebook PDF) Handbook of Dam EngineeringDesalegn TamirNo ratings yet
- Infinite SQ WellDocument7 pagesInfinite SQ Wellcghan1229No ratings yet
- Stochastic Dynamic Modeling of Damped Lotka-Volterra SystemDocument9 pagesStochastic Dynamic Modeling of Damped Lotka-Volterra SystemSandip BanerjeeNo ratings yet
- Nonlocal Fractional Evolution Inclusions of OrderDocument17 pagesNonlocal Fractional Evolution Inclusions of OrderSoumyajit GhoshNo ratings yet
- Template Chaos CircuitDocument14 pagesTemplate Chaos CircuitEnrique PriceNo ratings yet
- TU BKPHierarchyAdditionalSymmetriesFayIdentityAdlerShiotavanMoerbekeFormula LettMathPhys PDFDocument13 pagesTU BKPHierarchyAdditionalSymmetriesFayIdentityAdlerShiotavanMoerbekeFormula LettMathPhys PDFhelmantico1970No ratings yet
- Vibration of Single Degree of Freedom SystemDocument31 pagesVibration of Single Degree of Freedom SystemEnriqueGDNo ratings yet
- A10285W1 CP3 JuneDocument5 pagesA10285W1 CP3 Juneryanlin10No ratings yet
- Spiral Singularities of A SemiflowDocument14 pagesSpiral Singularities of A SemiflowKamil DunstNo ratings yet
- 2203BPS - Final Exam2009Document5 pages2203BPS - Final Exam2009samNo ratings yet
- PHYS3051 Methods in Theoretical Physics I (2016-17) : XX Yy ZZDocument2 pagesPHYS3051 Methods in Theoretical Physics I (2016-17) : XX Yy ZZKwong DavidNo ratings yet
- Time-Dependent SCHR Odinger Equation: Statistics of The Distribution of Gaussian Packets On A Metric GraphDocument17 pagesTime-Dependent SCHR Odinger Equation: Statistics of The Distribution of Gaussian Packets On A Metric GraphCarlos LopezNo ratings yet
- Exam 2016, Questions Exam 2016, QuestionsDocument6 pagesExam 2016, Questions Exam 2016, QuestionsRoy VeseyNo ratings yet
- Ring Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain RingDocument8 pagesRing Theoretical Method of Calculating First Extension Groups of Certain Modules Over Certain Ringnoether2978No ratings yet
- B1 Numerical Linear Algebra and Numerical Solution of Differential EquationsDocument6 pagesB1 Numerical Linear Algebra and Numerical Solution of Differential Equationsqurat-ul ainNo ratings yet
- Simple OscillatorsDocument41 pagesSimple OscillatorsCristian TuctoNo ratings yet
- Vol9 Iss11 5821 - 5829 Residual Power Series Method For TiDocument9 pagesVol9 Iss11 5821 - 5829 Residual Power Series Method For TiSayiqa JabeenNo ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- ERURJ - Volume 2 - Issue 4 - Pages 616-630Document15 pagesERURJ - Volume 2 - Issue 4 - Pages 616-630s_bhaumikNo ratings yet
- Tutorial 1Document3 pagesTutorial 1shivendra.singh.vermaNo ratings yet
- Local Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsDocument8 pagesLocal Existence and Blow-Up Criterion of 3D Ideal Magnetohydrodynamics EquationsNo FaceNo ratings yet
- On Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorsDocument12 pagesOn Spectral Deformations and Singular Weyl Functions For One-Dimensional Dirac OperatorshungkgNo ratings yet
- Ejercicios de LaplaceDocument3 pagesEjercicios de LaplaceJohn Erick Quiroga GonzalezNo ratings yet
- Indian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Document2 pagesIndian Institute of Technology Roorkee Department of Electronics & Computer Engineering Signals & Systems (ECN 203) Tutorial Sheet No: 5Black ReaperNo ratings yet
- Finite DifferenceDocument9 pagesFinite DifferenceSiddra KhawarNo ratings yet
- Homework For Math 6410 1, Fall 2013: Andrejs Treibergs, Instructor December 9, 2013Document14 pagesHomework For Math 6410 1, Fall 2013: Andrejs Treibergs, Instructor December 9, 2013Rodrigo KostaNo ratings yet
- Modal AnalysisDocument14 pagesModal Analysismichael_r_reid652No ratings yet
- Sdof DynDocument29 pagesSdof DynAnkur KurmiNo ratings yet
- Influence of The Fear Factor On The Dynamics of A Stochastic Predator-Prey ModelDocument7 pagesInfluence of The Fear Factor On The Dynamics of A Stochastic Predator-Prey ModelWaqar HassanNo ratings yet
- Assignment 2Document5 pagesAssignment 2Aarav 127No ratings yet
- Adaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitDocument13 pagesAdaptive Control of A Four-Dimensional Memristor-Based Chua's CircuitMohammed salah Abd elouahabNo ratings yet
- H2-Optimal Control - Lec8Document83 pagesH2-Optimal Control - Lec8stara123warNo ratings yet
- Linear Stochastic Differential Equations With Anticipating Initial ConditionsDocument9 pagesLinear Stochastic Differential Equations With Anticipating Initial ConditionsaqszaqszNo ratings yet
- GATE Mathematics Paper-2007Document11 pagesGATE Mathematics Paper-2007RajkumarNo ratings yet
- De Old ExamsDocument28 pagesDe Old ExamsOmarGarciaNo ratings yet
- Open Quantum Systems PS6Document2 pagesOpen Quantum Systems PS6SamNo ratings yet
- Applied Stochastic Differential Equations MATH10053: Thursday 16 December 2021 1300-1500Document4 pagesApplied Stochastic Differential Equations MATH10053: Thursday 16 December 2021 1300-1500Loh Jun XianNo ratings yet
- Henriksson, Exercises For QMDocument25 pagesHenriksson, Exercises For QMhristos314No ratings yet
- Mimetic Finite Difference Approximation of Quasilinear Elliptic Problems - 11311-972328 - AntoniettiDocument23 pagesMimetic Finite Difference Approximation of Quasilinear Elliptic Problems - 11311-972328 - Antoniettiedgardo olateNo ratings yet
- A Brief Introduction To Physics For MathematiciansDocument291 pagesA Brief Introduction To Physics For MathematiciansMaster OmNo ratings yet
- Paper 4Document9 pagesPaper 4Parthi SaminathanNo ratings yet
- OvsienkoRoger DeformingLieAlgrebraVectorFieldsS1 CommMathPhys PDFDocument14 pagesOvsienkoRoger DeformingLieAlgrebraVectorFieldsS1 CommMathPhys PDFhelmantico1970No ratings yet
- Leung-Kuang2006 Article OnTheChaoticDynamicsOfASphericDocument26 pagesLeung-Kuang2006 Article OnTheChaoticDynamicsOfASphericjaimeraisNo ratings yet
- Spring 2005 SolutionsDocument11 pagesSpring 2005 SolutionsÖzge TüncelNo ratings yet
- Analytic FBM RoughDocument27 pagesAnalytic FBM Roughanahh ramakNo ratings yet
- Fan e Zhao - de Giorgi e Continuidade 1997 PDFDocument24 pagesFan e Zhao - de Giorgi e Continuidade 1997 PDFThiago WilliamsNo ratings yet
- Linear Viscoelasticity: 5.1 Model EquationsDocument16 pagesLinear Viscoelasticity: 5.1 Model Equationsapi-3733260No ratings yet
- V A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensateDocument8 pagesV A Atanasov Et Al - Fordy-Kulish Model and Spinor Bose-Einstein CondensatePomac232No ratings yet
- Part II Problems and Solutions: Problem 1Document4 pagesPart II Problems and Solutions: Problem 1Bild LucaNo ratings yet
- Dynamics and Stability For Katugampola Random FracDocument13 pagesDynamics and Stability For Katugampola Random FracimtiazNo ratings yet
- Optimal Control (Course Code: 191561620)Document4 pagesOptimal Control (Course Code: 191561620)Abdesselem BoulkrouneNo ratings yet
- Practice - Questions - 2, System ScienceDocument3 pagesPractice - Questions - 2, System ScienceSONUNo ratings yet
- 6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaDocument22 pages6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaAli AzanNo ratings yet
- sns 2022 중간Document2 pagessns 2022 중간juyeons0204No ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- On the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)From EverandOn the Tangent Space to the Space of Algebraic Cycles on a Smooth Algebraic Variety. (AM-157)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Mathematical TriposDocument7 pagesMathematical TriposKaustubhNo ratings yet
- Genetics and The Aryan Issue-Michel DaninoDocument27 pagesGenetics and The Aryan Issue-Michel DaninoKaustubhNo ratings yet
- Paper 48Document5 pagesPaper 48KaustubhNo ratings yet
- Paper 69Document5 pagesPaper 69KaustubhNo ratings yet
- Mathematical Tripos Part IA 2009Document27 pagesMathematical Tripos Part IA 2009KaustubhNo ratings yet
- Mathematical TriposDocument7 pagesMathematical TriposKaustubhNo ratings yet
- Paper 55Document6 pagesPaper 55KaustubhNo ratings yet
- Paper 71Document4 pagesPaper 71KaustubhNo ratings yet
- Paper 31Document4 pagesPaper 31KaustubhNo ratings yet
- Paper 27Document4 pagesPaper 27KaustubhNo ratings yet
- Paper 15Document3 pagesPaper 15KaustubhNo ratings yet
- Paper 47Document6 pagesPaper 47KaustubhNo ratings yet
- Paper 18Document2 pagesPaper 18KaustubhNo ratings yet
- Paper 56Document4 pagesPaper 56KaustubhNo ratings yet
- Hawking 1987Document8 pagesHawking 1987KaustubhNo ratings yet
- Paper 75Document3 pagesPaper 75KaustubhNo ratings yet
- Brane-World Black Holes: 共Received 28 October 1999; Published 25 February 2000兲Document6 pagesBrane-World Black Holes: 共Received 28 October 1999; Published 25 February 2000兲KaustubhNo ratings yet
- Paper 73Document6 pagesPaper 73KaustubhNo ratings yet
- Group 2Document57 pagesGroup 2Lyka FigerNo ratings yet
- Structure of Nursing KnowledgeDocument18 pagesStructure of Nursing KnowledgeMelany naritoNo ratings yet
- NE20E-S V800R022C00SPC600 Configuration Guide 01 Basic ConfigurationDocument422 pagesNE20E-S V800R022C00SPC600 Configuration Guide 01 Basic ConfigurationMoises HenriqueNo ratings yet
- Welded Steel Fabric: Natsteel Holdings Pte LTDDocument8 pagesWelded Steel Fabric: Natsteel Holdings Pte LTDSantosoNo ratings yet
- The Jet Volume 5 Number 7Document40 pagesThe Jet Volume 5 Number 7THE JETNo ratings yet
- Sample Haddon MatrixDocument3 pagesSample Haddon MatrixAsmphLibrary OrtigasNo ratings yet
- Conclusion ParagraphDocument7 pagesConclusion Paragraphapi-334926654No ratings yet
- SMC2I - Top 100 Stockholders As of September 30, 2022Document5 pagesSMC2I - Top 100 Stockholders As of September 30, 2022John Kenie CayetanoNo ratings yet
- BEGS 185 AssignmentDocument4 pagesBEGS 185 AssignmentPrachi BadhwarNo ratings yet
- Exam SolutionDocument11 pagesExam SolutionasmaaNo ratings yet
- Astm A313 2003Document7 pagesAstm A313 2003ArefkhanNo ratings yet
- Benefits For Blue Collar Employees - Oishik-1.docx (1) 3Document73 pagesBenefits For Blue Collar Employees - Oishik-1.docx (1) 3Anonymous Fsv7B0No ratings yet
- Mathtothe MaxDocument383 pagesMathtothe MaxKeith BeardNo ratings yet
- Agung Chrisyancandra MobonguniDocument2 pagesAgung Chrisyancandra Mobongunialfibaria0% (1)
- FOI 20210117 1 Data SetDocument82 pagesFOI 20210117 1 Data Setabrar mahir SahilNo ratings yet
- Durastor Tank Brochure PDFDocument8 pagesDurastor Tank Brochure PDFhamadaniNo ratings yet
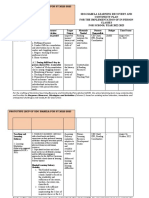
- v2 SDO ISABELA LEARNING RECOVERY PLANDocument16 pagesv2 SDO ISABELA LEARNING RECOVERY PLANRoland Mark DumaliangNo ratings yet
- Yak 52 Maitenance ManualDocument36 pagesYak 52 Maitenance ManualAvionicsfNo ratings yet
- ESP Standard SizingDocument131 pagesESP Standard Sizingmohamed gamal100% (2)
- Asna NotesDocument95 pagesAsna NotesHumbang PurbaNo ratings yet
- Planes of SymmetryDocument38 pagesPlanes of SymmetryRuchika Chandna83% (6)
- Il Pleut Prevert ProjectDocument1 pageIl Pleut Prevert Projectapi-239640128No ratings yet
- BỘ ĐỀ IELTS SPEAKING QUÝ 1-2023Document14 pagesBỘ ĐỀ IELTS SPEAKING QUÝ 1-2023phuongNo ratings yet
- DNA For The Defense BarDocument192 pagesDNA For The Defense BarshaninroseNo ratings yet
- Capr II En6282Document42 pagesCapr II En6282mssonuneNo ratings yet
- UntitledDocument321 pagesUntitled谷光生No ratings yet
- Short Story ElementsDocument8 pagesShort Story Elementsaaliakhan05No ratings yet
- Hypothesis TestingDocument6 pagesHypothesis TestingYuan GaoNo ratings yet
- Flexible Cable: House WiringDocument16 pagesFlexible Cable: House WiringNitinNo ratings yet