Download as docx, pdf, or txt
You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 4 out of 5 stars4/5 (2)
- Realistic CT SpecsDocument7 pagesRealistic CT Specskapil100% (6)
- Ybus Matrix With Regulating Transformer - Self Study TopicDocument21 pagesYbus Matrix With Regulating Transformer - Self Study TopicSankar MuthuswamyNo ratings yet
- ELX303 Exam SolutionsDocument27 pagesELX303 Exam SolutionsNadeesha BandaraNo ratings yet
- Process Modelling and Simulation - IntroductionDocument40 pagesProcess Modelling and Simulation - Introductiondppriya1984100% (3)
- Electrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiDocument9 pagesElectrical and Electronics Measurements and Instrumentation-77-Đã Chuyển ĐổiNguyên Nguyễn SơnNo ratings yet
- Saturation CurveDocument6 pagesSaturation CurvevyroreiNo ratings yet
- Object: 1. Negative Sequence RelaysDocument15 pagesObject: 1. Negative Sequence RelaysAhmed ElsharkawyNo ratings yet
- 3phase To 2phase Conversion in TransformersDocument4 pages3phase To 2phase Conversion in Transformersabcd sripathiNo ratings yet
- Electrical Power Systems Wadhwa 7Document1 pageElectrical Power Systems Wadhwa 7teceeeNo ratings yet
- Ch7 Symmetrical FaultsDocument37 pagesCh7 Symmetrical FaultsAlamgir KhanNo ratings yet
- 05666416Document6 pages05666416asjokiiu546No ratings yet
- Capacitor EnergyDocument12 pagesCapacitor EnergyKamel KerroucheNo ratings yet
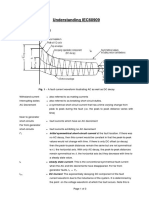
- Understanding IEC 60909Document3 pagesUnderstanding IEC 60909Mauricio Toro CasallasNo ratings yet
- Calculation of Short-Circuit Currents: 2.1.1 Effect of The System ImpedanceDocument19 pagesCalculation of Short-Circuit Currents: 2.1.1 Effect of The System ImpedanceDara HengNo ratings yet
- Module - 3 HVDCDocument15 pagesModule - 3 HVDCSatya Raj GuptaNo ratings yet
- T P E I T: Esting and Erformance Valuation of Nstrument RansformersDocument15 pagesT P E I T: Esting and Erformance Valuation of Nstrument RansformersAnimesh JainNo ratings yet
- FaultDocument27 pagesFaultግርማ ገ.No ratings yet
- Current Conveyor Application Notes MaximDocument5 pagesCurrent Conveyor Application Notes MaximUmesh ParasharNo ratings yet
- Bef 12403 Week 1 Electric Charge Voltage Power and EnergyDocument46 pagesBef 12403 Week 1 Electric Charge Voltage Power and EnergyمحمدحنيفNo ratings yet
- Understanding Transients: Conceptual Interpretation: Ieee On Vol. No. 2, 521Document6 pagesUnderstanding Transients: Conceptual Interpretation: Ieee On Vol. No. 2, 521xernoxianNo ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- Experiment B6 Aim: Apparatus:: Characteristics of DiodeDocument9 pagesExperiment B6 Aim: Apparatus:: Characteristics of DiodeAnurag BajpaiNo ratings yet
- Alternator Short CircuitDocument2 pagesAlternator Short CircuitAnirban MandalNo ratings yet
- Current TransformerDocument39 pagesCurrent TransformerTarun Varshney100% (1)
- Microcontroller Based Active and Reactive Power Measurement PDFDocument7 pagesMicrocontroller Based Active and Reactive Power Measurement PDFgeniunetNo ratings yet
- ELE 312 Measurements and InstrumentationDocument36 pagesELE 312 Measurements and InstrumentationAjiboye MubarakNo ratings yet
- 22 DC CircuitsDocument7 pages22 DC CircuitssamNo ratings yet
- ControlDocument18 pagesControlSiaka MsaleNo ratings yet
- CBCTDocument14 pagesCBCTYPV TECHNICAL SERVICES100% (1)
- The Impact of Current Transformer Saturation On The Distance ProtectionDocument5 pagesThe Impact of Current Transformer Saturation On The Distance ProtectionFabien CallodNo ratings yet
- BE EE 8sem-Converter Sys Control-Neha SinghDocument16 pagesBE EE 8sem-Converter Sys Control-Neha SinghPritesh PandyaNo ratings yet
- Symmetrical Networks 2.3.1 Symmetrical Networks For Three Phase Transmission LinesDocument17 pagesSymmetrical Networks 2.3.1 Symmetrical Networks For Three Phase Transmission LinesAlesso RossiNo ratings yet
- Using A Synchronous Converter For Harmonic Mitigation With AC DrivesDocument10 pagesUsing A Synchronous Converter For Harmonic Mitigation With AC Drivesmit85No ratings yet
- Module 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsDocument55 pagesModule 4: DC-DC Converters: Lec 9: DC-DC Converters For EV and HEV ApplicationsFabricioNo ratings yet
- Analysis of Tihe Operation of A Distance Relay During An Unbalanced Arc Fault Ani) Verification by Model TestsDocument4 pagesAnalysis of Tihe Operation of A Distance Relay During An Unbalanced Arc Fault Ani) Verification by Model TestsJohari Zhou Hao LiNo ratings yet
- Chapter Eight: Dc-Ac Conversion: InvertersDocument57 pagesChapter Eight: Dc-Ac Conversion: InvertersMd NazimNo ratings yet
- Unit-2 Part ADocument16 pagesUnit-2 Part AMr. R. Jagan EEENo ratings yet
- Unit-Ii: Converter and HVDC System Control: Principles of DC Link ControlDocument22 pagesUnit-Ii: Converter and HVDC System Control: Principles of DC Link ControlMr. R. Jagan EEENo ratings yet
- AC DC ConvertersDocument11 pagesAC DC ConvertersMoon BorahNo ratings yet
- Converter Modeling EL - 18 - 1 - 06Document7 pagesConverter Modeling EL - 18 - 1 - 06sf111No ratings yet
- New Single-Phase Active Power Filter: Idc (T)Document6 pagesNew Single-Phase Active Power Filter: Idc (T)murthy237No ratings yet
- Electrical Power Engineering (2) : Dr. Ahmed Mohamed AzmyDocument17 pagesElectrical Power Engineering (2) : Dr. Ahmed Mohamed Azmykaren dejoNo ratings yet
- Elect MC 1 Chap-2 Lecture-7Document16 pagesElect MC 1 Chap-2 Lecture-7gopal sapkotaNo ratings yet
- Pulse-Width-Modulated (PWM) Inverter : Chapter 10 (Or 6) PDocument35 pagesPulse-Width-Modulated (PWM) Inverter : Chapter 10 (Or 6) PM.h. SawonNo ratings yet
- Meters Are OxygenDocument25 pagesMeters Are OxygenDharmesh Ranjan GuptaNo ratings yet
- P1 c6Document75 pagesP1 c6muaz_aminu1422No ratings yet
- Ojo 87tseñales PDFDocument24 pagesOjo 87tseñales PDFYaidel RodriguezNo ratings yet
- Harmonic Reduction in Three-Phase ParallelDocument6 pagesHarmonic Reduction in Three-Phase ParallelAhmed JanadNo ratings yet
- Transient StabilityDocument26 pagesTransient StabilitySarojakanti SahooNo ratings yet
- Experiment No:01 Name of The Experiment: Observation of No Load and Full Load Characteristics of A Three-PhaseDocument16 pagesExperiment No:01 Name of The Experiment: Observation of No Load and Full Load Characteristics of A Three-PhaseRupalNo ratings yet
- Module 10: Differential Protection of Bus, Transformer and Generator: Transformer ProtectionDocument3 pagesModule 10: Differential Protection of Bus, Transformer and Generator: Transformer ProtectionThirumalNo ratings yet
- Testing Numerical Transformer Diff RelaysDocument11 pagesTesting Numerical Transformer Diff Relayshizbi70% (1)
- W Set 5 TrafoDocument5 pagesW Set 5 TrafostglNo ratings yet
- Lab EpsaDocument19 pagesLab Epsasemuty92No ratings yet
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsFrom EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsNo ratings yet
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Numerical Overcurrent RelayDocument1 pageNumerical Overcurrent RelayTariq Mohammed Omar0% (1)
- Analogue Signals From CT and PTDocument2 pagesAnalogue Signals From CT and PTTariq Mohammed OmarNo ratings yet
- 3.3.5 TCSC Controller Model For Stability: Fig.3.6. Modes of TCSC OperationDocument1 page3.3.5 TCSC Controller Model For Stability: Fig.3.6. Modes of TCSC OperationTariq Mohammed OmarNo ratings yet
- 3.3.2 Operation of The TCSC 3.3.2.1 Basic Principle: Figure 3.4 A Variable Inductor Connected in Shunt With An FCDocument1 page3.3.2 Operation of The TCSC 3.3.2.1 Basic Principle: Figure 3.4 A Variable Inductor Connected in Shunt With An FCTariq Mohammed OmarNo ratings yet
- 3.3 Variable Impedance Type Series Compensator: Figure 3.3 Basic Thyristor-Controlled Series Capacitor SchemeDocument2 pages3.3 Variable Impedance Type Series Compensator: Figure 3.3 Basic Thyristor-Controlled Series Capacitor SchemeTariq Mohammed OmarNo ratings yet
- Numerical Relays: Please Submit The Report in DOC and PTT FormatDocument2 pagesNumerical Relays: Please Submit The Report in DOC and PTT FormatTariq Mohammed OmarNo ratings yet
- IMAC XIII 13th 13 13 3 Complex Modes Origins Limits PDFDocument11 pagesIMAC XIII 13th 13 13 3 Complex Modes Origins Limits PDFramanollaNo ratings yet
- Academia Letters: AwarenessDocument9 pagesAcademia Letters: AwarenessSimranjeet Singh KhalsaNo ratings yet
- Arithmetic Sequence WorksheetDocument2 pagesArithmetic Sequence WorksheetAnj LeynesNo ratings yet
- Reliability Indices For Road Geometric DesignDocument7 pagesReliability Indices For Road Geometric DesignyoukesiNo ratings yet
- G3 Camb. Investigating 3D Shapes &netsDocument8 pagesG3 Camb. Investigating 3D Shapes &netsHarshita BhasinNo ratings yet
- Xu-Ly-Ngon-Ngu-Tu-Nhien - Kai-Wei-Chang - 16-Cky - (Cuuduongthancong - Com)Document61 pagesXu-Ly-Ngon-Ngu-Tu-Nhien - Kai-Wei-Chang - 16-Cky - (Cuuduongthancong - Com)NeilFaverNo ratings yet
- Thermal Analysis of The Arc Welding Process Part I. General SolutionsDocument18 pagesThermal Analysis of The Arc Welding Process Part I. General SolutionsAnkita PaliwalNo ratings yet
- Analysis of Corrugated Web Beam To Column Extended End Plate Connection UsingDocument75 pagesAnalysis of Corrugated Web Beam To Column Extended End Plate Connection UsingLina Lina LoulouNo ratings yet
- EC202 Signals and SystemsDocument2 pagesEC202 Signals and SystemsThulasi M SanthiNo ratings yet
- Mathematics 1a 1Document2 pagesMathematics 1a 1saipriya buddeNo ratings yet
- 11th - STD - Physics - Volume II - EM - WWW - Tntextbooks.in PDFDocument328 pages11th - STD - Physics - Volume II - EM - WWW - Tntextbooks.in PDFTheresaNo ratings yet
- STT041 and STT041.1 PDFDocument59 pagesSTT041 and STT041.1 PDFHayrah Lawi100% (2)
- Using Scientific MethodsDocument2 pagesUsing Scientific MethodsReynaPolNo ratings yet
- C and C++ and Assembly Language ReferenceDocument246 pagesC and C++ and Assembly Language Referenceamey thakurNo ratings yet
- House Pricing RegressionDocument11 pagesHouse Pricing Regressionnitin3078No ratings yet
- P) Eiemiee (: Shot Peening Intensity MeasurementDocument6 pagesP) Eiemiee (: Shot Peening Intensity MeasurementDharmendra MishraNo ratings yet
- Persona Antes de Fumar Después de FumarDocument5 pagesPersona Antes de Fumar Después de FumarRaúl Solís PérezNo ratings yet
- LaTeX EngDocument482 pagesLaTeX Engkrlekrle123No ratings yet
- A Free MATLAB Alternative Called OctaveDocument6 pagesA Free MATLAB Alternative Called OctavemivanoNo ratings yet
- Example of Mutual Impedances: ( Z) Matrix Formulation in The Presence ofDocument8 pagesExample of Mutual Impedances: ( Z) Matrix Formulation in The Presence ofamit77999No ratings yet
- LFB FormulaDistriubutionDocument43 pagesLFB FormulaDistriubutionTMJ4 NewsNo ratings yet
- MGemar PE Exam Transportation Supplement 9-29-14Document28 pagesMGemar PE Exam Transportation Supplement 9-29-14John Stanley100% (2)
- West Bengal Board Class 11 Physics SyllabusDocument5 pagesWest Bengal Board Class 11 Physics Syllabussoum.mi4iNo ratings yet
- Mathematics Paper 2: Latihan UlangkajiDocument21 pagesMathematics Paper 2: Latihan UlangkajiyimNo ratings yet
- Linked List Slide-2Document20 pagesLinked List Slide-2abrarNo ratings yet
- Lecture 11Document29 pagesLecture 11ahsan puriNo ratings yet
- Polarography: Purpose: Polarography Is The Measurement of The Current That Flows in Solution As A Function of AnDocument10 pagesPolarography: Purpose: Polarography Is The Measurement of The Current That Flows in Solution As A Function of AnAdeel AdiNo ratings yet
- Quantitative Techniques For Management: MBA First Year Paper No. 6Document4 pagesQuantitative Techniques For Management: MBA First Year Paper No. 6kunalc-1No ratings yet
- Rasinger Quantitative Research in Linguistics 7 Analysing DataDocument39 pagesRasinger Quantitative Research in Linguistics 7 Analysing DataMartina BrkicNo ratings yet