Download as pdf or txt
You might also like
- Chapter 1Document26 pagesChapter 1Sohail SakhaniNo ratings yet
- Frequency DistributionDocument5 pagesFrequency DistributionJuan HeroNo ratings yet
- UnitDocument3 pagesUnitzoya.zulfiqar10No ratings yet
- 26 - Fluid TransportationDocument105 pages26 - Fluid TransportationBalaji KrishnanNo ratings yet
- Terreno 2Document1 pageTerreno 2ABIMAEL MAMANINo ratings yet
- Consider a reservoir with the following data 0.17 1 1 80,000 ft 40,000 ft 10,000 STB/D Viscosity data: μ = 1.05 cp μ = 2.5+ 36 12 Fractional flow dataDocument3 pagesConsider a reservoir with the following data 0.17 1 1 80,000 ft 40,000 ft 10,000 STB/D Viscosity data: μ = 1.05 cp μ = 2.5+ 36 12 Fractional flow dataVictor Pugliese ManotasNo ratings yet
- Stabilitas MercuDocument9 pagesStabilitas MercuaurickNo ratings yet
- Oceanography and Marine Biology RepairedDocument542 pagesOceanography and Marine Biology Repairedajik indiantoNo ratings yet
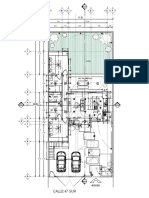
- Residential DesignDocument1 pageResidential DesignWilbert ReuyanNo ratings yet
- 21100-4-8480-SP-0001 - 0 - Heat Exchangers (E-101)Document41 pages21100-4-8480-SP-0001 - 0 - Heat Exchangers (E-101)jhunkujha11No ratings yet
- Helipad Waterproofing AttachmentDocument1 pageHelipad Waterproofing AttachmentCorazon GONo ratings yet
- Paddy Field: Proposed A/E WorksDocument1 pagePaddy Field: Proposed A/E Workssumita sinhaNo ratings yet
- A 1Document1 pageA 1marimimora.29No ratings yet
- Datasheet SR12V80A V0 enDocument1 pageDatasheet SR12V80A V0 enDavid MonederoNo ratings yet
- Arch'l Doors and Window-Layout1Document1 pageArch'l Doors and Window-Layout1Dwight SanchezNo ratings yet
- Planos para Trámite-Model - PDF Mely ElevacionDocument1 pagePlanos para Trámite-Model - PDF Mely ElevacionOmar Alfonso Pérez ValdezNo ratings yet
- Ukuran GewelDocument1 pageUkuran GewelMuhammad Nur AlimkNo ratings yet
- Hydrodynamic Pressure Calculation For Sump: Bending Moment Diagram Hoop Tension DiagramDocument8 pagesHydrodynamic Pressure Calculation For Sump: Bending Moment Diagram Hoop Tension Diagramepe civilNo ratings yet
- Door 1 Flatness Report FrontDocument1 pageDoor 1 Flatness Report FrontMark Gil MarianoNo ratings yet
- Datasheet SR12V40A V0 enDocument1 pageDatasheet SR12V40A V0 enDavid MonederoNo ratings yet
- Absolute Mode: 3.625 R0.5 TYP C G D H 0.4 K J IDocument1 pageAbsolute Mode: 3.625 R0.5 TYP C G D H 0.4 K J IDavid BumbaloughNo ratings yet
- 11-03 Absolute Mode PDFDocument1 page11-03 Absolute Mode PDFDavid BumbaloughNo ratings yet
- Graphs & SchematicsDocument16 pagesGraphs & Schematicsshamanth12No ratings yet
- Ac Bridges PDFDocument5 pagesAc Bridges PDFPiara SinghNo ratings yet
- BC 425 1Document1 pageBC 425 1satyamNo ratings yet
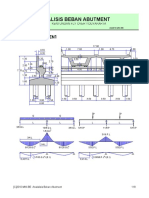
- Analisis Beban AbutmentDocument2 pagesAnalisis Beban AbutmentAnonymous Xn5rKyeANo ratings yet
- Fixed Face: Designed Drawn Approved Checked Arm - Design Arm - Design Job No. Product Name. EN-001-XXXX-00XDocument1 pageFixed Face: Designed Drawn Approved Checked Arm - Design Arm - Design Job No. Product Name. EN-001-XXXX-00XLuck Mars ChukNo ratings yet
- Datasheet SR12V82ARF V0 enDocument1 pageDatasheet SR12V82ARF V0 enDavid MonederoNo ratings yet
- Datasheet SR12V85A V0 enDocument1 pageDatasheet SR12V85A V0 enDavid MonederoNo ratings yet
- Datasheet SR12V122A V0 enDocument1 pageDatasheet SR12V122A V0 enDavid MonederoNo ratings yet
- Red de Agua FríaDocument7 pagesRed de Agua FríaRuslanNo ratings yet
- Steady-State Fluid Flow With A Free SurfaceDocument12 pagesSteady-State Fluid Flow With A Free SurfaceGuido AndreottiNo ratings yet
- Datasheet SR12V105A V0 enDocument1 pageDatasheet SR12V105A V0 enDavid MonederoNo ratings yet
- Door 1 Flatness Report BackDocument1 pageDoor 1 Flatness Report BackMark Gil MarianoNo ratings yet
- D4SB10 D4SB100: FeaturesDocument2 pagesD4SB10 D4SB100: FeaturesMarcelituz RojasNo ratings yet
- Interaction DiagramDocument13 pagesInteraction DiagramhithereNo ratings yet
- Design of Concrete Structures Appendix A: F F H HDocument12 pagesDesign of Concrete Structures Appendix A: F F H HHeba Bazlamit100% (1)
- CRP 19 ModelDocument1 pageCRP 19 ModelexpoprefacrNo ratings yet
- Planta Baja: A B C D E FDocument1 pagePlanta Baja: A B C D E FNicolas WickyNo ratings yet
- Block B1: Temperature ProfileDocument5 pagesBlock B1: Temperature ProfileAnonymous rwWE4tZrQNo ratings yet
- Excel Grafik KompuDocument8 pagesExcel Grafik KompuSatria Jaya PratamaNo ratings yet
- Soal Praktik Ahsp - Rekrutmen Fastek 2021Document24 pagesSoal Praktik Ahsp - Rekrutmen Fastek 2021Tata DiptaNo ratings yet
- 7.6 Experimental External Flows: Table 7.2 Drag of TwoDocument1 page7.6 Experimental External Flows: Table 7.2 Drag of TwoCristopher Becerra SalvadorNo ratings yet
- Drive Mechanisms - Closed BookDocument10 pagesDrive Mechanisms - Closed BookAshraf SeragNo ratings yet
- Datasheet SR12V65A V0 enDocument1 pageDatasheet SR12V65A V0 enDavid MonederoNo ratings yet
- Sesion 3 - Tabla Concentrador de EsfuerzosDocument10 pagesSesion 3 - Tabla Concentrador de EsfuerzosĞôřqûî ĀğūîřřêNo ratings yet
- Power Transistor E13003: Switching Regulator ApplicationDocument2 pagesPower Transistor E13003: Switching Regulator Applicationblancodaniel00000No ratings yet
- Conforja: Di Mensions and Weights For Seamless or Welded Pi PesDocument360 pagesConforja: Di Mensions and Weights For Seamless or Welded Pi PesGustavoSilvinoSilvinoNo ratings yet
- Vortex Formula BookDocument5 pagesVortex Formula BookCristian GiurgeaNo ratings yet
- Volumetrics PDFDocument2 pagesVolumetrics PDFMod Hah GhasdcNo ratings yet
- Yin a-ViT Adaptive Tokens For Efficient Vision Transformer CVPR 2022 PaperDocument10 pagesYin a-ViT Adaptive Tokens For Efficient Vision Transformer CVPR 2022 Paperlizhongzhi2000No ratings yet
- E13003 PDFDocument2 pagesE13003 PDFLuis VivasNo ratings yet
- Scara:1:500/100: N10.6 - CVG N10.6 - CD10Document1 pageScara:1:500/100: N10.6 - CVG N10.6 - CD10Tibi TibiNo ratings yet
- Datasheet PDFDocument2 pagesDatasheet PDFCalixto Milla EsauNo ratings yet
- Fractional Crystallization 1) ModelDocument9 pagesFractional Crystallization 1) ModelOmni SthaNo ratings yet
- PDF Gabung 2Document45 pagesPDF Gabung 2nuriislamy santosoNo ratings yet
- Metre SemelleDocument1 pageMetre SemelleImane EN NACERNo ratings yet
- Slab IllustrationsDocument1 pageSlab IllustrationsFernando PascualNo ratings yet
- Tema IV.1 - Earth Pressure at RestDocument21 pagesTema IV.1 - Earth Pressure at RestEduardo Alemany PerretNo ratings yet
- Schematic Diagraam Bending MBSDocument1 pageSchematic Diagraam Bending MBSkristanto jpNo ratings yet
- Training ProposalsDocument3 pagesTraining ProposalsJuan HeroNo ratings yet
- Turbines and Pumps Notes in ThermodynamicsDocument5 pagesTurbines and Pumps Notes in ThermodynamicsJuan Hero100% (1)
- Open Channel FlowDocument161 pagesOpen Channel FlowJuan Hero100% (1)
- Open Channel FlowDocument161 pagesOpen Channel FlowJuan HeroNo ratings yet
- Statistics ExerciseDocument1 pageStatistics ExerciseJuan HeroNo ratings yet
- In Figure C, If The Oil in Region Has S.G. 0.8 and The Absolute Pressure at Point A Is 1 Atm, What Is The Absolute Pressure at Point ?Document1 pageIn Figure C, If The Oil in Region Has S.G. 0.8 and The Absolute Pressure at Point A Is 1 Atm, What Is The Absolute Pressure at Point ?Juan HeroNo ratings yet
- Open Channel FlowDocument166 pagesOpen Channel FlowJuan HeroNo ratings yet
- Sample Problems in BouyancyDocument2 pagesSample Problems in BouyancyJuan HeroNo ratings yet
- T SC 2551110 A Level Chemistry Mass Spectrometry Study Guide - Ver - 3Document7 pagesT SC 2551110 A Level Chemistry Mass Spectrometry Study Guide - Ver - 3sara.u1925No ratings yet
- MCQ of Chapter 1, 2, 3 and 7 Class XII ChemistryDocument30 pagesMCQ of Chapter 1, 2, 3 and 7 Class XII ChemistryPrince BaraiyaNo ratings yet
- Molecular Orbital TheoryDocument4 pagesMolecular Orbital TheoryYuexun ZhangNo ratings yet
- Markscheme HL Paper1Document32 pagesMarkscheme HL Paper1Amelia GrabanNo ratings yet
- M.SC Physics Sem 1-2 2020-21Document13 pagesM.SC Physics Sem 1-2 2020-21Dixit VajaparaNo ratings yet
- Unit 4Document10 pagesUnit 423/CH/002 AADITYAVASHISHTNo ratings yet
- Classification of Magnetic MaterialsDocument15 pagesClassification of Magnetic MaterialsDileep Singh100% (1)
- Exercises For Light and Waves ExamDocument7 pagesExercises For Light and Waves ExamVarvaraNo ratings yet
- TimeDocument21 pagesTimeL EixenbergerNo ratings yet
- Group 2 - ch117l - Final Lab Report 4Document10 pagesGroup 2 - ch117l - Final Lab Report 4Luis Alfonso DañezNo ratings yet
- Series BDocument7 pagesSeries Bpraphul4uNo ratings yet
- Interactions of Food BiopolymersDocument6 pagesInteractions of Food BiopolymersAnida Maria Moraes GomesNo ratings yet
- Superconducting Qubit Based On Twisted Cuprate Van Der Waals HeterostructuresDocument11 pagesSuperconducting Qubit Based On Twisted Cuprate Van Der Waals HeterostructuresOBXONo ratings yet
- Chemistry 9M GuessDocument9 pagesChemistry 9M GuessadilNo ratings yet
- Spin Atomic Model: Role of Electron Spin in Forming Atoms and MoleculesDocument8 pagesSpin Atomic Model: Role of Electron Spin in Forming Atoms and MoleculesGhanshyam JadhavNo ratings yet
- Electric Charges and FieldsDocument18 pagesElectric Charges and FieldsYashwanthNo ratings yet
- Techniques Proton Radiotherapy: Bernard Gottschalk Harvard UniversityDocument39 pagesTechniques Proton Radiotherapy: Bernard Gottschalk Harvard Universityasansone2220No ratings yet
- Assignment Fluid MechanicsDocument8 pagesAssignment Fluid MechanicsPhanna MongNo ratings yet
- Understanding Einstein: The Special Theory of RelativityDocument1 pageUnderstanding Einstein: The Special Theory of RelativityAnonymous G3DRjDMkNo ratings yet
- Theromodynamics 1Document14 pagesTheromodynamics 1UPSC GEOGRAPHYNo ratings yet
- Slump TestDocument3 pagesSlump TestcrimsonbunnieNo ratings yet
- Grade-12 Physical-Science Q2 Wk3 GLAKDocument24 pagesGrade-12 Physical-Science Q2 Wk3 GLAKJose GulitiwNo ratings yet
- 5-ES321 Tutorial5Document4 pages5-ES321 Tutorial5HARSH GUPTANo ratings yet
- (1964) Correlations in The Motions of Atoms in Liquid ArgonDocument7 pages(1964) Correlations in The Motions of Atoms in Liquid ArgonJakler Nichele100% (1)
- Uv Visible SpectrosDocument6 pagesUv Visible Spectrospankajbhattb_pharmaNo ratings yet
- Physics MCQs For Class 12 With Answers Chapter 10Document12 pagesPhysics MCQs For Class 12 With Answers Chapter 10Akshith ReddyNo ratings yet
- NSMQ Pasco FundamentalDocument34 pagesNSMQ Pasco FundamentalamadubabaabdulrahmanNo ratings yet
- Physics 2 Quarter 3Document35 pagesPhysics 2 Quarter 3Aaron Justin Beltran100% (1)
- Biophysics of Sensory ReceptorsDocument12 pagesBiophysics of Sensory Receptorsmirian meladzeNo ratings yet
- 09 LectureSlidesDocument137 pages09 LectureSlidesSpartinNo ratings yet