
Assessing The Cost Effectiveness of NDE Methods in Civil Structures
Assessing The Cost Effectiveness of NDE Methods in Civil Structures
You might also like
- NordDocument7 pagesNordSuperhypoNo ratings yet
- Ballast Water Management ConventionDocument52 pagesBallast Water Management Conventionleopradeep100% (3)
- Chapter 5Document50 pagesChapter 5molla biyadgieNo ratings yet
- Reliability Analysis of Aeroplane tyresOKDocument12 pagesReliability Analysis of Aeroplane tyresOKchrysobergiNo ratings yet
- ReliabilityDocument58 pagesReliabilityGorvendra SinghNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Document23 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Deepika ManglaNo ratings yet
- Reliability Models of Maintained SystemsDocument8 pagesReliability Models of Maintained SystemsMoamen TahaNo ratings yet
- Chapter 7 - 02Document33 pagesChapter 7 - 02Samuel WozabNo ratings yet
- Reliability & Maintainability Exam Solutions 2011 v4Document12 pagesReliability & Maintainability Exam Solutions 2011 v4luchogilmourNo ratings yet
- RELIABILITYDocument12 pagesRELIABILITYHemed hafidhNo ratings yet
- Chapter 7 - 02 Reliability and MaintainabilityDocument35 pagesChapter 7 - 02 Reliability and MaintainabilityMuket AgmasNo ratings yet
- Availability and Cost Function For Periodically Inspected MaintenanceDocument8 pagesAvailability and Cost Function For Periodically Inspected MaintenanceMuhammad Rusydi AlwiNo ratings yet
- Kelompok 4Document13 pagesKelompok 4KomanghNo ratings yet
- Preventive MaintenanceDocument12 pagesPreventive MaintenanceMartin BIYIHANo ratings yet
- Reliability EngineeringDocument70 pagesReliability EngineeringUmashankar GautamNo ratings yet
- 03 Characteristics of ReliabilityDocument9 pages03 Characteristics of ReliabilityrogeriojuruaiaNo ratings yet
- Chap3 PDFDocument31 pagesChap3 PDFPranveer Singh PariharNo ratings yet
- Reliability Analysis of Pump in Linear Alkyl Benzene Plant of (K R P C) For Maintenance Strategy Selection H. A. AbubakarDocument7 pagesReliability Analysis of Pump in Linear Alkyl Benzene Plant of (K R P C) For Maintenance Strategy Selection H. A. AbubakarGabriel Alves FerreiraNo ratings yet
- MP Avt 157 08Document14 pagesMP Avt 157 08Saeed ZamaniNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 6Document9 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 6ALIKNF100% (1)
- CH 4Document34 pagesCH 4mwasdave153261No ratings yet
- 03 Failure Distribution r1Document8 pages03 Failure Distribution r1Jie Lucas TzaiNo ratings yet
- Incert en TransducoresDocument6 pagesIncert en TransducoresEduardo Mejía RomeroNo ratings yet
- Note7 - Reliability - Theory - RevisedDocument5 pagesNote7 - Reliability - Theory - RevisedMohamed El KikiNo ratings yet
- 10 - Chapter 4 PDFDocument30 pages10 - Chapter 4 PDFOscar Kelvin NsituNo ratings yet
- Reliability ConceptsiswaDocument26 pagesReliability ConceptsiswasunyaNo ratings yet
- Modelos de Degradação 3Document8 pagesModelos de Degradação 3ambrosio85No ratings yet
- LDG Jiang TimedependentreliabilityDocument7 pagesLDG Jiang TimedependentreliabilityDeen HalisNo ratings yet
- Iscs 2013 Tm-EngDocument6 pagesIscs 2013 Tm-EngVlad Alexandru FloreaNo ratings yet
- Life Cycle Cost Analisys Applied To Reinforcement Corrosion RepairDocument7 pagesLife Cycle Cost Analisys Applied To Reinforcement Corrosion RepairDavid IzquierdoNo ratings yet
- CIRED2009 0004 PaperDocument4 pagesCIRED2009 0004 PaperkotiniNo ratings yet
- Quality Control Reliability And: Learning OutcomesDocument20 pagesQuality Control Reliability And: Learning Outcomestarek moahmoud khalifaNo ratings yet
- System Reliability: Resit Unal Engineering Management & Systems Engineering Dept. Old Dominion University Runal@odu - EduDocument77 pagesSystem Reliability: Resit Unal Engineering Management & Systems Engineering Dept. Old Dominion University Runal@odu - EduIrfan IrshadNo ratings yet
- Paper by MF Manganye, PM Tlabela and DR DV NicolaeDocument12 pagesPaper by MF Manganye, PM Tlabela and DR DV NicolaekotiniNo ratings yet
- IfacDocument8 pagesIfacT ChangNo ratings yet
- A Planning Model For Inspection and Replacement of Pipes in A Refinery PlantDocument6 pagesA Planning Model For Inspection and Replacement of Pipes in A Refinery PlantPranpath NarupantawartNo ratings yet
- Reliability ClassDocument24 pagesReliability ClassVishal MeenaNo ratings yet
- Applsci 10 00445Document17 pagesApplsci 10 00445Aslam Faqeer MuhammadNo ratings yet
- Reliability & Failure Rate: Dr. Arshad Ahmad Email: Arshad@cheme - Utm.myDocument19 pagesReliability & Failure Rate: Dr. Arshad Ahmad Email: Arshad@cheme - Utm.myFaizal AbdullahNo ratings yet
- Retention Time: Vietnam National University Ho Chi Minh City Ho Chi Minh City University of TechnologyDocument15 pagesRetention Time: Vietnam National University Ho Chi Minh City Ho Chi Minh City University of Technologykhai.ledinh1406No ratings yet
- Inspection of Onshore PipelinesDocument6 pagesInspection of Onshore PipelinesIrvansyah RazadinNo ratings yet
- Fundamentals of Reliability Engineering and ApplicationsDocument63 pagesFundamentals of Reliability Engineering and ApplicationsHanum Febriliani ValentinNo ratings yet
- Chapter 4 & 5Document12 pagesChapter 4 & 5endalkachewNo ratings yet
- CS203 - Advanced Computer Architecture: Dependability & ReliabilityDocument17 pagesCS203 - Advanced Computer Architecture: Dependability & Reliabilityanon_240227768No ratings yet
- Assessment and Service Life Updating of Existing Tunnels: Safe & Reliable Tunnels. Innovative European AchievementsDocument10 pagesAssessment and Service Life Updating of Existing Tunnels: Safe & Reliable Tunnels. Innovative European AchievementsSarath Chandran SNo ratings yet
- Restoration of Bridge Networks After An Earthquake: Multicriteria Intervention OptimizationDocument29 pagesRestoration of Bridge Networks After An Earthquake: Multicriteria Intervention OptimizationPrasanth SekarNo ratings yet
- Accepted Manuscript: 10.1016/j.omega.2017.08.003Document38 pagesAccepted Manuscript: 10.1016/j.omega.2017.08.003ezffsdgNo ratings yet
- Compressor ReliabilityDocument2 pagesCompressor ReliabilityPaul RasmussenNo ratings yet
- Maintenance Optimization of The RP10 Shutdown Safety System: A.H. Aguirre & G.S. LazaroDocument3 pagesMaintenance Optimization of The RP10 Shutdown Safety System: A.H. Aguirre & G.S. LazaroALVARO HUMFREDO AGUIRRE ANCIETANo ratings yet
- DP 471: Electrical Safety and Maintenance: Lesson 5: Optimal Replacement DecisionsDocument11 pagesDP 471: Electrical Safety and Maintenance: Lesson 5: Optimal Replacement DecisionsCalvinhoNo ratings yet
- Bridging The Gap Between Theory and Practice in Maintenance: D.N.P. (Pra) MURTHYDocument50 pagesBridging The Gap Between Theory and Practice in Maintenance: D.N.P. (Pra) MURTHYDinesh Kumar MaliNo ratings yet
- Reliability 1Document71 pagesReliability 1AyoNo ratings yet
- Chapter 3 and 4 - Reliability, Maintainability, and Availability of Facilities and The Assessment and Control of Product Reliability - 2019Document35 pagesChapter 3 and 4 - Reliability, Maintainability, and Availability of Facilities and The Assessment and Control of Product Reliability - 2019endalkachewNo ratings yet
- c1Document68 pagesc1Waqar AhmedNo ratings yet
- Unit V Reliability Apr 06 2020Document56 pagesUnit V Reliability Apr 06 2020Venkadeshwaran KuthalingamNo ratings yet
- A Study For The Effect of Surface Roughness On Resistance Characteristics of Flat PlatesDocument8 pagesA Study For The Effect of Surface Roughness On Resistance Characteristics of Flat PlatesGraeme ComynNo ratings yet
- FEM-9 221 EnglischDocument9 pagesFEM-9 221 EnglischxgclNo ratings yet
- Notes Part 2Document53 pagesNotes Part 2Os ZaidNo ratings yet
- Forensic Study of Structural DurabilityDocument10 pagesForensic Study of Structural Durabilityindrajit sodhaNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Fsa LNGDocument149 pagesFsa LNGAndy ChongNo ratings yet
- Environmental Injustice Ship Breakng in Bangladesh A Risk To Health and EnvironmentDocument12 pagesEnvironmental Injustice Ship Breakng in Bangladesh A Risk To Health and Environmentapi-508744273No ratings yet
- TowingDocument1 pageTowingMihaela ErmeniuNo ratings yet
- Warfleets FTL - Core Rules v1.8Document3 pagesWarfleets FTL - Core Rules v1.8LucheNo ratings yet
- Arriving at A Port.Document40 pagesArriving at A Port.Carlos BermudezNo ratings yet
- Treating Waste Where It Is CreatedDocument20 pagesTreating Waste Where It Is Createdkeltechnology2666No ratings yet
- Advanced Ship Propulsion Technology: A Review: Hari Prastowo, Francisco Pinto and SeminDocument11 pagesAdvanced Ship Propulsion Technology: A Review: Hari Prastowo, Francisco Pinto and SeminmendesNo ratings yet
- Some Practical Aspects of Ship Launching: Part 1. Starting and CheckingDocument14 pagesSome Practical Aspects of Ship Launching: Part 1. Starting and CheckingKaung Myat HeinNo ratings yet
- Master LNG Fob Sales AgreementDocument45 pagesMaster LNG Fob Sales AgreementMamberamoFoja100% (1)
- MIKEDocument66 pagesMIKEanon_911628021No ratings yet
- SIRE Inspections On Oil TankersDocument5 pagesSIRE Inspections On Oil Tankersrahmat jamilNo ratings yet
- Dokumen - Tips - Diesel Electric Drives by Man DieselDocument9 pagesDokumen - Tips - Diesel Electric Drives by Man DieselKevinNo ratings yet
- Executive Summary PTK-KJP Published 160524 PDFDocument41 pagesExecutive Summary PTK-KJP Published 160524 PDFGuido ContiniNo ratings yet
- Executive SummaryDocument4 pagesExecutive SummaryMuhammad Akmal HafizNo ratings yet
- Merlo Telescopic Handler p40 17 p38 p60 CDC Wiring Diagram enDocument22 pagesMerlo Telescopic Handler p40 17 p38 p60 CDC Wiring Diagram enteresataylor130203xqo100% (27)
- 2022 Annual IMB Piracy and Armed Robbery ReportDocument54 pages2022 Annual IMB Piracy and Armed Robbery ReportMohamed YasenNo ratings yet
- Heddle PRESS RELEASE - Acquisition of Thunder Bay Shipyard - Feb - 24 - 2017Document1 pageHeddle PRESS RELEASE - Acquisition of Thunder Bay Shipyard - Feb - 24 - 2017Tyler McLeanNo ratings yet
- Mombasa Port Master Plan Including Dongo Kundu: Final ReportDocument314 pagesMombasa Port Master Plan Including Dongo Kundu: Final ReportengineerkoiNo ratings yet
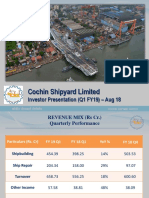
- CSL Investor Presentation Aug 18Document21 pagesCSL Investor Presentation Aug 18gopalptkssNo ratings yet
- NEW BUILDING PROPOSAL - April 2023Document9 pagesNEW BUILDING PROPOSAL - April 2023Everest NjokuNo ratings yet
- Carefully To Carry: Hold Cleaning: Bulk Cargoes - Preparing A Ship For GrainDocument13 pagesCarefully To Carry: Hold Cleaning: Bulk Cargoes - Preparing A Ship For Grainbigenur100% (1)
- CODE OF PRACTICE V1.0 - Up To 24m - FinalDocument84 pagesCODE OF PRACTICE V1.0 - Up To 24m - FinalJimmy LeeNo ratings yet
- ECDIS - ENC E-Navigation 2007 PDFDocument23 pagesECDIS - ENC E-Navigation 2007 PDFTanvir ShovonNo ratings yet
- The MSB Journal: August 2014Document31 pagesThe MSB Journal: August 2014anon_835518017No ratings yet
- Biro Klasifikasi Indonesia: Application For ClassificationDocument7 pagesBiro Klasifikasi Indonesia: Application For ClassificationJoy Arief JanuarNo ratings yet
- Model Ballast Water Management Plan - January 2014 - tcm155-241771Document58 pagesModel Ballast Water Management Plan - January 2014 - tcm155-241771Hashem GamNo ratings yet
- Battlefleet Gothic 2010 Compendium: Battlefleet BakkaDocument13 pagesBattlefleet Gothic 2010 Compendium: Battlefleet BakkaSpammalott100% (2)
- Catalog Marine Engineering Interactive PDFDocument67 pagesCatalog Marine Engineering Interactive PDFakın ersözNo ratings yet























































































Download as pdf or txt
You might also like
- NordDocument7 pagesNordSuperhypoNo ratings yet
- Ballast Water Management ConventionDocument52 pagesBallast Water Management Conventionleopradeep100% (3)
- Chapter 5Document50 pagesChapter 5molla biyadgieNo ratings yet
- Reliability Analysis of Aeroplane tyresOKDocument12 pagesReliability Analysis of Aeroplane tyresOKchrysobergiNo ratings yet
- ReliabilityDocument58 pagesReliabilityGorvendra SinghNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Document23 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 3 Session 2Deepika ManglaNo ratings yet
- Reliability Models of Maintained SystemsDocument8 pagesReliability Models of Maintained SystemsMoamen TahaNo ratings yet
- Chapter 7 - 02Document33 pagesChapter 7 - 02Samuel WozabNo ratings yet
- Reliability & Maintainability Exam Solutions 2011 v4Document12 pagesReliability & Maintainability Exam Solutions 2011 v4luchogilmourNo ratings yet
- RELIABILITYDocument12 pagesRELIABILITYHemed hafidhNo ratings yet
- Chapter 7 - 02 Reliability and MaintainabilityDocument35 pagesChapter 7 - 02 Reliability and MaintainabilityMuket AgmasNo ratings yet
- Availability and Cost Function For Periodically Inspected MaintenanceDocument8 pagesAvailability and Cost Function For Periodically Inspected MaintenanceMuhammad Rusydi AlwiNo ratings yet
- Kelompok 4Document13 pagesKelompok 4KomanghNo ratings yet
- Preventive MaintenanceDocument12 pagesPreventive MaintenanceMartin BIYIHANo ratings yet
- Reliability EngineeringDocument70 pagesReliability EngineeringUmashankar GautamNo ratings yet
- 03 Characteristics of ReliabilityDocument9 pages03 Characteristics of ReliabilityrogeriojuruaiaNo ratings yet
- Chap3 PDFDocument31 pagesChap3 PDFPranveer Singh PariharNo ratings yet
- Reliability Analysis of Pump in Linear Alkyl Benzene Plant of (K R P C) For Maintenance Strategy Selection H. A. AbubakarDocument7 pagesReliability Analysis of Pump in Linear Alkyl Benzene Plant of (K R P C) For Maintenance Strategy Selection H. A. AbubakarGabriel Alves FerreiraNo ratings yet
- MP Avt 157 08Document14 pagesMP Avt 157 08Saeed ZamaniNo ratings yet
- Risk Analysis For Information and Systems Engineering: INSE 6320 - Week 6Document9 pagesRisk Analysis For Information and Systems Engineering: INSE 6320 - Week 6ALIKNF100% (1)
- CH 4Document34 pagesCH 4mwasdave153261No ratings yet
- 03 Failure Distribution r1Document8 pages03 Failure Distribution r1Jie Lucas TzaiNo ratings yet
- Incert en TransducoresDocument6 pagesIncert en TransducoresEduardo Mejía RomeroNo ratings yet
- Note7 - Reliability - Theory - RevisedDocument5 pagesNote7 - Reliability - Theory - RevisedMohamed El KikiNo ratings yet
- 10 - Chapter 4 PDFDocument30 pages10 - Chapter 4 PDFOscar Kelvin NsituNo ratings yet
- Reliability ConceptsiswaDocument26 pagesReliability ConceptsiswasunyaNo ratings yet
- Modelos de Degradação 3Document8 pagesModelos de Degradação 3ambrosio85No ratings yet
- LDG Jiang TimedependentreliabilityDocument7 pagesLDG Jiang TimedependentreliabilityDeen HalisNo ratings yet
- Iscs 2013 Tm-EngDocument6 pagesIscs 2013 Tm-EngVlad Alexandru FloreaNo ratings yet
- Life Cycle Cost Analisys Applied To Reinforcement Corrosion RepairDocument7 pagesLife Cycle Cost Analisys Applied To Reinforcement Corrosion RepairDavid IzquierdoNo ratings yet
- CIRED2009 0004 PaperDocument4 pagesCIRED2009 0004 PaperkotiniNo ratings yet
- Quality Control Reliability And: Learning OutcomesDocument20 pagesQuality Control Reliability And: Learning Outcomestarek moahmoud khalifaNo ratings yet
- System Reliability: Resit Unal Engineering Management & Systems Engineering Dept. Old Dominion University Runal@odu - EduDocument77 pagesSystem Reliability: Resit Unal Engineering Management & Systems Engineering Dept. Old Dominion University Runal@odu - EduIrfan IrshadNo ratings yet
- Paper by MF Manganye, PM Tlabela and DR DV NicolaeDocument12 pagesPaper by MF Manganye, PM Tlabela and DR DV NicolaekotiniNo ratings yet
- IfacDocument8 pagesIfacT ChangNo ratings yet
- A Planning Model For Inspection and Replacement of Pipes in A Refinery PlantDocument6 pagesA Planning Model For Inspection and Replacement of Pipes in A Refinery PlantPranpath NarupantawartNo ratings yet
- Reliability ClassDocument24 pagesReliability ClassVishal MeenaNo ratings yet
- Applsci 10 00445Document17 pagesApplsci 10 00445Aslam Faqeer MuhammadNo ratings yet
- Reliability & Failure Rate: Dr. Arshad Ahmad Email: Arshad@cheme - Utm.myDocument19 pagesReliability & Failure Rate: Dr. Arshad Ahmad Email: Arshad@cheme - Utm.myFaizal AbdullahNo ratings yet
- Retention Time: Vietnam National University Ho Chi Minh City Ho Chi Minh City University of TechnologyDocument15 pagesRetention Time: Vietnam National University Ho Chi Minh City Ho Chi Minh City University of Technologykhai.ledinh1406No ratings yet
- Inspection of Onshore PipelinesDocument6 pagesInspection of Onshore PipelinesIrvansyah RazadinNo ratings yet
- Fundamentals of Reliability Engineering and ApplicationsDocument63 pagesFundamentals of Reliability Engineering and ApplicationsHanum Febriliani ValentinNo ratings yet
- Chapter 4 & 5Document12 pagesChapter 4 & 5endalkachewNo ratings yet
- CS203 - Advanced Computer Architecture: Dependability & ReliabilityDocument17 pagesCS203 - Advanced Computer Architecture: Dependability & Reliabilityanon_240227768No ratings yet
- Assessment and Service Life Updating of Existing Tunnels: Safe & Reliable Tunnels. Innovative European AchievementsDocument10 pagesAssessment and Service Life Updating of Existing Tunnels: Safe & Reliable Tunnels. Innovative European AchievementsSarath Chandran SNo ratings yet
- Restoration of Bridge Networks After An Earthquake: Multicriteria Intervention OptimizationDocument29 pagesRestoration of Bridge Networks After An Earthquake: Multicriteria Intervention OptimizationPrasanth SekarNo ratings yet
- Accepted Manuscript: 10.1016/j.omega.2017.08.003Document38 pagesAccepted Manuscript: 10.1016/j.omega.2017.08.003ezffsdgNo ratings yet
- Compressor ReliabilityDocument2 pagesCompressor ReliabilityPaul RasmussenNo ratings yet
- Maintenance Optimization of The RP10 Shutdown Safety System: A.H. Aguirre & G.S. LazaroDocument3 pagesMaintenance Optimization of The RP10 Shutdown Safety System: A.H. Aguirre & G.S. LazaroALVARO HUMFREDO AGUIRRE ANCIETANo ratings yet
- DP 471: Electrical Safety and Maintenance: Lesson 5: Optimal Replacement DecisionsDocument11 pagesDP 471: Electrical Safety and Maintenance: Lesson 5: Optimal Replacement DecisionsCalvinhoNo ratings yet
- Bridging The Gap Between Theory and Practice in Maintenance: D.N.P. (Pra) MURTHYDocument50 pagesBridging The Gap Between Theory and Practice in Maintenance: D.N.P. (Pra) MURTHYDinesh Kumar MaliNo ratings yet
- Reliability 1Document71 pagesReliability 1AyoNo ratings yet
- Chapter 3 and 4 - Reliability, Maintainability, and Availability of Facilities and The Assessment and Control of Product Reliability - 2019Document35 pagesChapter 3 and 4 - Reliability, Maintainability, and Availability of Facilities and The Assessment and Control of Product Reliability - 2019endalkachewNo ratings yet
- c1Document68 pagesc1Waqar AhmedNo ratings yet
- Unit V Reliability Apr 06 2020Document56 pagesUnit V Reliability Apr 06 2020Venkadeshwaran KuthalingamNo ratings yet
- A Study For The Effect of Surface Roughness On Resistance Characteristics of Flat PlatesDocument8 pagesA Study For The Effect of Surface Roughness On Resistance Characteristics of Flat PlatesGraeme ComynNo ratings yet
- FEM-9 221 EnglischDocument9 pagesFEM-9 221 EnglischxgclNo ratings yet
- Notes Part 2Document53 pagesNotes Part 2Os ZaidNo ratings yet
- Forensic Study of Structural DurabilityDocument10 pagesForensic Study of Structural Durabilityindrajit sodhaNo ratings yet
- Numerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityFrom EverandNumerical Methods for Simulation and Optimization of Piecewise Deterministic Markov Processes: Application to ReliabilityNo ratings yet
- Analytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportFrom EverandAnalytical Modeling of Solute Transport in Groundwater: Using Models to Understand the Effect of Natural Processes on Contaminant Fate and TransportNo ratings yet
- Fsa LNGDocument149 pagesFsa LNGAndy ChongNo ratings yet
- Environmental Injustice Ship Breakng in Bangladesh A Risk To Health and EnvironmentDocument12 pagesEnvironmental Injustice Ship Breakng in Bangladesh A Risk To Health and Environmentapi-508744273No ratings yet
- TowingDocument1 pageTowingMihaela ErmeniuNo ratings yet
- Warfleets FTL - Core Rules v1.8Document3 pagesWarfleets FTL - Core Rules v1.8LucheNo ratings yet
- Arriving at A Port.Document40 pagesArriving at A Port.Carlos BermudezNo ratings yet
- Treating Waste Where It Is CreatedDocument20 pagesTreating Waste Where It Is Createdkeltechnology2666No ratings yet
- Advanced Ship Propulsion Technology: A Review: Hari Prastowo, Francisco Pinto and SeminDocument11 pagesAdvanced Ship Propulsion Technology: A Review: Hari Prastowo, Francisco Pinto and SeminmendesNo ratings yet
- Some Practical Aspects of Ship Launching: Part 1. Starting and CheckingDocument14 pagesSome Practical Aspects of Ship Launching: Part 1. Starting and CheckingKaung Myat HeinNo ratings yet
- Master LNG Fob Sales AgreementDocument45 pagesMaster LNG Fob Sales AgreementMamberamoFoja100% (1)
- MIKEDocument66 pagesMIKEanon_911628021No ratings yet
- SIRE Inspections On Oil TankersDocument5 pagesSIRE Inspections On Oil Tankersrahmat jamilNo ratings yet
- Dokumen - Tips - Diesel Electric Drives by Man DieselDocument9 pagesDokumen - Tips - Diesel Electric Drives by Man DieselKevinNo ratings yet
- Executive Summary PTK-KJP Published 160524 PDFDocument41 pagesExecutive Summary PTK-KJP Published 160524 PDFGuido ContiniNo ratings yet
- Executive SummaryDocument4 pagesExecutive SummaryMuhammad Akmal HafizNo ratings yet
- Merlo Telescopic Handler p40 17 p38 p60 CDC Wiring Diagram enDocument22 pagesMerlo Telescopic Handler p40 17 p38 p60 CDC Wiring Diagram enteresataylor130203xqo100% (27)
- 2022 Annual IMB Piracy and Armed Robbery ReportDocument54 pages2022 Annual IMB Piracy and Armed Robbery ReportMohamed YasenNo ratings yet
- Heddle PRESS RELEASE - Acquisition of Thunder Bay Shipyard - Feb - 24 - 2017Document1 pageHeddle PRESS RELEASE - Acquisition of Thunder Bay Shipyard - Feb - 24 - 2017Tyler McLeanNo ratings yet
- Mombasa Port Master Plan Including Dongo Kundu: Final ReportDocument314 pagesMombasa Port Master Plan Including Dongo Kundu: Final ReportengineerkoiNo ratings yet
- CSL Investor Presentation Aug 18Document21 pagesCSL Investor Presentation Aug 18gopalptkssNo ratings yet
- NEW BUILDING PROPOSAL - April 2023Document9 pagesNEW BUILDING PROPOSAL - April 2023Everest NjokuNo ratings yet
- Carefully To Carry: Hold Cleaning: Bulk Cargoes - Preparing A Ship For GrainDocument13 pagesCarefully To Carry: Hold Cleaning: Bulk Cargoes - Preparing A Ship For Grainbigenur100% (1)
- CODE OF PRACTICE V1.0 - Up To 24m - FinalDocument84 pagesCODE OF PRACTICE V1.0 - Up To 24m - FinalJimmy LeeNo ratings yet
- ECDIS - ENC E-Navigation 2007 PDFDocument23 pagesECDIS - ENC E-Navigation 2007 PDFTanvir ShovonNo ratings yet
- The MSB Journal: August 2014Document31 pagesThe MSB Journal: August 2014anon_835518017No ratings yet
- Biro Klasifikasi Indonesia: Application For ClassificationDocument7 pagesBiro Klasifikasi Indonesia: Application For ClassificationJoy Arief JanuarNo ratings yet
- Model Ballast Water Management Plan - January 2014 - tcm155-241771Document58 pagesModel Ballast Water Management Plan - January 2014 - tcm155-241771Hashem GamNo ratings yet
- Battlefleet Gothic 2010 Compendium: Battlefleet BakkaDocument13 pagesBattlefleet Gothic 2010 Compendium: Battlefleet BakkaSpammalott100% (2)
- Catalog Marine Engineering Interactive PDFDocument67 pagesCatalog Marine Engineering Interactive PDFakın ersözNo ratings yet