
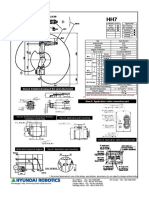
Payload 6Kgf: View C: Application Cable Connection Part
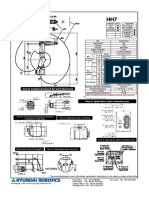
Payload 6Kgf: View C: Application Cable Connection Part
You might also like
- IVECO EuroTronic Gearbox Fault CodesDocument4 pagesIVECO EuroTronic Gearbox Fault CodesSurafel Abebe0% (2)
- Parts Catalog TVS RockzDocument104 pagesParts Catalog TVS RockzFerdian Wahyu Kusumawardhana60% (10)
- Allweiler NTT Series DimensionsDocument2 pagesAllweiler NTT Series DimensionskrisornNo ratings yet
- CUMMINS ISX CM870 EGR Delete KIT Instruc PDFDocument8 pagesCUMMINS ISX CM870 EGR Delete KIT Instruc PDFjames santiagoNo ratings yet
- HH7 HH7 HH7 HH7: View A: Detailed Drawing of The Wrist AttachmentDocument1 pageHH7 HH7 HH7 HH7: View A: Detailed Drawing of The Wrist Attachmentjitender kumarNo ratings yet
- Hh7 CatalogDocument1 pageHh7 Catalogjitender kumarNo ratings yet
- HS220 Catalog - Eng - Rev3Document1 pageHS220 Catalog - Eng - Rev3anmellaNo ratings yet
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocument2 pages500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNo ratings yet
- Handling Robot With Top Rated Loading Capacity: 700kg PayloadDocument2 pagesHandling Robot With Top Rated Loading Capacity: 700kg PayloadXanti Zabala Da RosaNo ratings yet
- HA006Document4 pagesHA006Berkay GültekinNo ratings yet
- Ha006 Hi5Document3 pagesHa006 Hi5Berkay GültekinNo ratings yet
- Datasheet ArcMate 120ic 12LDocument1 pageDatasheet ArcMate 120ic 12LmuertesalvajeNo ratings yet
- MZ07F MZ07LF 1Document2 pagesMZ07F MZ07LF 1Loi DoanNo ratings yet
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- HR030LDocument4 pagesHR030LBerkay GültekinNo ratings yet
- Fanuc R-2000iB-250FDocument1 pageFanuc R-2000iB-250Fljubisha.nikolovskiNo ratings yet
- ARC Mate 100 Robot Working RangeDocument1 pageARC Mate 100 Robot Working RangeTamii LópezNo ratings yet
- Datasheet M 900ib 700Document1 pageDatasheet M 900ib 700Fitra VertikalNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- Series: Actuators General CatalogDocument10 pagesSeries: Actuators General Catalogrieza_fNo ratings yet
- Heavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionDocument2 pagesHeavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionXanti Zabala Da RosaNo ratings yet
- Datasheet P 350ia 45 2Document1 pageDatasheet P 350ia 45 2Jose Rosas SandovalNo ratings yet
- Datasheet LRMate-200iD-7WPDocument1 pageDatasheet LRMate-200iD-7WPperop123No ratings yet
- Datasheet M-710iC-12LDocument1 pageDatasheet M-710iC-12LconanbhNo ratings yet
- Catálogo Hyundai RoboticsDocument8 pagesCatálogo Hyundai RoboticsAndre CorreiaNo ratings yet
- Robot Series: Hyundai RoboticsDocument8 pagesRobot Series: Hyundai Roboticsjavier50% (2)
- MC600 BrochureDocument2 pagesMC600 BrochureXanti Zabala Da RosaNo ratings yet
- Datasheet M-410iB-140HDocument1 pageDatasheet M-410iB-140HByronNo ratings yet
- Datasheet M-410iB-700 PDFDocument1 pageDatasheet M-410iB-700 PDFDiego Alejandro Gallardo IbarraNo ratings yet
- Datasheet M-10iA-12Document1 pageDatasheet M-10iA-12EVA motionNo ratings yet
- Datasheet M 10ia 10MDocument1 pageDatasheet M 10ia 10MHeriberto LopezNo ratings yet
- Datasheet M-710iC-20LDocument1 pageDatasheet M-710iC-20LAntonio SanchezNo ratings yet
- Datasheet LRMate-200iD-7LCDocument1 pageDatasheet LRMate-200iD-7LCPremium WzorceNo ratings yet
- Fanuc TF - CR-35 - enDocument2 pagesFanuc TF - CR-35 - enpacamu05No ratings yet
- M-900 Robot Working Range: 360 KG 2655 MMDocument1 pageM-900 Robot Working Range: 360 KG 2655 MMKAKAKNo ratings yet
- Datasheet M 900ib 360Document1 pageDatasheet M 900ib 360ariyanto prasetioNo ratings yet
- Datasheet M 710ic 70Document1 pageDatasheet M 710ic 70Diego CamachoNo ratings yet
- M900iB 400LDocument1 pageM900iB 400LLeonardo AlexNo ratings yet
- Datasheet PaintMate 200ia 5LDocument1 pageDatasheet PaintMate 200ia 5LRafa LozanoNo ratings yet
- R-2000iC-125L HOJA DATOS PDFDocument1 pageR-2000iC-125L HOJA DATOS PDFgatolefuNo ratings yet
- Datasheet M 2000ia 900LDocument1 pageDatasheet M 2000ia 900LM. NaardingNo ratings yet
- Datasheet M-10iA-10MDocument1 pageDatasheet M-10iA-10MGTutorNo ratings yet
- Otc Ax-V4Document2 pagesOtc Ax-V4Cesar A.C ZapateiroNo ratings yet
- Servo Positioner: Positioner For Coordinated Arc Welding Robot SystemDocument4 pagesServo Positioner: Positioner For Coordinated Arc Welding Robot SystemRicardo Castro SalazarNo ratings yet
- Datasheet LRMate-200iD-4S - KUKADocument1 pageDatasheet LRMate-200iD-4S - KUKAJOSE MANUELNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- HS220Document8 pagesHS220아몰레드No ratings yet
- M-410 Robot Working Range: 315 KG 3143 MMDocument1 pageM-410 Robot Working Range: 315 KG 3143 MMdomepetuNo ratings yet
- RobotsDocument8 pagesRobotsRicardo Miranda Jr.0% (1)
- Datasheet M-710iC-70TDocument1 pageDatasheet M-710iC-70TjosjcrsNo ratings yet
- M-710 Robot Working Range: 70 KG 2050 MMDocument1 pageM-710 Robot Working Range: 70 KG 2050 MMjosjcrsNo ratings yet
- SRA100/166/210/166L/120EL: World Class Speed RobotDocument2 pagesSRA100/166/210/166L/120EL: World Class Speed RobotXanti Zabala Da RosaNo ratings yet
- Outstanding Path Accuracy: Maximum Precision andDocument2 pagesOutstanding Path Accuracy: Maximum Precision andJorge GodielNo ratings yet
- Datasheet M 410ib 140HDocument1 pageDatasheet M 410ib 140HJonathan RodriguezNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- (Synced) AL6002 User ManualDocument8 pages(Synced) AL6002 User ManualchidyamakuniNo ratings yet
- Sinamics g120 PN at s7-1200 Docu v1d3 enDocument1 pageSinamics g120 PN at s7-1200 Docu v1d3 enAsim PedicNo ratings yet
- Kuka YouBot Technical Specs PDFDocument4 pagesKuka YouBot Technical Specs PDFWilliam GuarientiNo ratings yet
- r2h 1909Document2 pagesr2h 1909Daniel Arce RomeroNo ratings yet
- Datasheet M 2000ia 2300Document1 pageDatasheet M 2000ia 2300carlosdr.05.09.1993No ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- Datasheet-Cr7ia L EnglishDocument1 pageDatasheet-Cr7ia L EnglishNgộ Không TônNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- DWD Summo AllDocument4 pagesDWD Summo AllMario Allesina JuniorNo ratings yet
- Kurt Pamvouxoglou KDE11 20SS Service - Manual PDFDocument111 pagesKurt Pamvouxoglou KDE11 20SS Service - Manual PDFرحمة هداية اللهNo ratings yet
- Especificaciones Motor CatDocument5 pagesEspecificaciones Motor CatWalter TaucherNo ratings yet
- Braden Bga06 Manual de PartesDocument24 pagesBraden Bga06 Manual de PartesMauricio Ariel H. OrellanaNo ratings yet
- HKS Corporate IntroductionDocument41 pagesHKS Corporate IntroductionfarizzamzamNo ratings yet
- Pipe Grooving Machine Latest 2018Document8 pagesPipe Grooving Machine Latest 2018anon_667646586100% (1)
- MCQ in Machine Design and Shop Practice Part 3 ME Board ExamDocument17 pagesMCQ in Machine Design and Shop Practice Part 3 ME Board Examtagne simo rodrigueNo ratings yet
- Ford Diesel 3-Cylinder Liquid-Cooled 201 Ci: (3.3 L) (112 X 112 MM)Document4 pagesFord Diesel 3-Cylinder Liquid-Cooled 201 Ci: (3.3 L) (112 X 112 MM)Alex CastilloNo ratings yet
- Scramjet EngineDocument2 pagesScramjet EngineSãröj ShâhNo ratings yet
- Plate No. 2 - Roller Chains, Sprocket and Wire RopeDocument5 pagesPlate No. 2 - Roller Chains, Sprocket and Wire Ropeanton pogiNo ratings yet
- NOLH NT ENG 50Hz PDFDocument50 pagesNOLH NT ENG 50Hz PDFarielbankiNo ratings yet
- Clutch UnitDocument3 pagesClutch Unitpavel35No ratings yet
- Main Relief 302.5Document11 pagesMain Relief 302.5Yudi setiawanNo ratings yet
- Ecs Service Technical Handbook: Publ. No. 923862-0014 00-08Document31 pagesEcs Service Technical Handbook: Publ. No. 923862-0014 00-08Trần Quốc ĐôngNo ratings yet
- Caterpillar EnginesDocument134 pagesCaterpillar EnginesFouad Bel100% (1)
- Skoda Octavia Mk1 04 Heating Air ConditioningDocument118 pagesSkoda Octavia Mk1 04 Heating Air Conditioningdaliborjaro80% (5)
- Vendor ListDocument5 pagesVendor Listdarwish1982No ratings yet
- 3750 Pulpress Pressurisation Unit: Installation and Operating InstructionsDocument14 pages3750 Pulpress Pressurisation Unit: Installation and Operating InstructionsRonNo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - AssignmentDocument4 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - AssignmentchaitanyaNo ratings yet
- D6R-2HM-Cylinder Head - InstallDocument6 pagesD6R-2HM-Cylinder Head - InstallalbundyNo ratings yet
- Grasso Screw Compressor Package Pi - tcm11 38504Document84 pagesGrasso Screw Compressor Package Pi - tcm11 38504Twfeek AhmedNo ratings yet
- Fish Pumping Applications: Excellent Power & Industrial SolutionsDocument4 pagesFish Pumping Applications: Excellent Power & Industrial SolutionsAnonymous sOAsuDLXNo ratings yet
- IO-360-L2A Parts Catalog PC-406-L2A PDFDocument75 pagesIO-360-L2A Parts Catalog PC-406-L2A PDFPiyushNo ratings yet
- 350 Series Electrohydraulic Actuators: Bulletin 61.5:350Document12 pages350 Series Electrohydraulic Actuators: Bulletin 61.5:350Datt NguyenNo ratings yet
- Method Statement of Chiller Preventive MaintenanceDocument5 pagesMethod Statement of Chiller Preventive MaintenanceBalajiNo ratings yet




















































































Download as pdf or txt
You might also like
- IVECO EuroTronic Gearbox Fault CodesDocument4 pagesIVECO EuroTronic Gearbox Fault CodesSurafel Abebe0% (2)
- Parts Catalog TVS RockzDocument104 pagesParts Catalog TVS RockzFerdian Wahyu Kusumawardhana60% (10)
- Allweiler NTT Series DimensionsDocument2 pagesAllweiler NTT Series DimensionskrisornNo ratings yet
- CUMMINS ISX CM870 EGR Delete KIT Instruc PDFDocument8 pagesCUMMINS ISX CM870 EGR Delete KIT Instruc PDFjames santiagoNo ratings yet
- HH7 HH7 HH7 HH7: View A: Detailed Drawing of The Wrist AttachmentDocument1 pageHH7 HH7 HH7 HH7: View A: Detailed Drawing of The Wrist Attachmentjitender kumarNo ratings yet
- Hh7 CatalogDocument1 pageHh7 Catalogjitender kumarNo ratings yet
- HS220 Catalog - Eng - Rev3Document1 pageHS220 Catalog - Eng - Rev3anmellaNo ratings yet
- 500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsDocument2 pages500 KG Payload Capacity For Optimal Handling of Large and Heavy LoadsXanti Zabala Da RosaNo ratings yet
- Handling Robot With Top Rated Loading Capacity: 700kg PayloadDocument2 pagesHandling Robot With Top Rated Loading Capacity: 700kg PayloadXanti Zabala Da RosaNo ratings yet
- HA006Document4 pagesHA006Berkay GültekinNo ratings yet
- Ha006 Hi5Document3 pagesHa006 Hi5Berkay GültekinNo ratings yet
- Datasheet ArcMate 120ic 12LDocument1 pageDatasheet ArcMate 120ic 12LmuertesalvajeNo ratings yet
- MZ07F MZ07LF 1Document2 pagesMZ07F MZ07LF 1Loi DoanNo ratings yet
- ES12 BrochureDocument2 pagesES12 BrochureXanti Zabala Da RosaNo ratings yet
- HR030LDocument4 pagesHR030LBerkay GültekinNo ratings yet
- Fanuc R-2000iB-250FDocument1 pageFanuc R-2000iB-250Fljubisha.nikolovskiNo ratings yet
- ARC Mate 100 Robot Working RangeDocument1 pageARC Mate 100 Robot Working RangeTamii LópezNo ratings yet
- Datasheet M 900ib 700Document1 pageDatasheet M 900ib 700Fitra VertikalNo ratings yet
- SRA166 210 01A BrochureDocument2 pagesSRA166 210 01A BrochureXanti Zabala Da RosaNo ratings yet
- Series: Actuators General CatalogDocument10 pagesSeries: Actuators General Catalogrieza_fNo ratings yet
- Heavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionDocument2 pagesHeavy Duty Handling Robots Lift Loads of 350kg: High-Speed MotionXanti Zabala Da RosaNo ratings yet
- Datasheet P 350ia 45 2Document1 pageDatasheet P 350ia 45 2Jose Rosas SandovalNo ratings yet
- Datasheet LRMate-200iD-7WPDocument1 pageDatasheet LRMate-200iD-7WPperop123No ratings yet
- Datasheet M-710iC-12LDocument1 pageDatasheet M-710iC-12LconanbhNo ratings yet
- Catálogo Hyundai RoboticsDocument8 pagesCatálogo Hyundai RoboticsAndre CorreiaNo ratings yet
- Robot Series: Hyundai RoboticsDocument8 pagesRobot Series: Hyundai Roboticsjavier50% (2)
- MC600 BrochureDocument2 pagesMC600 BrochureXanti Zabala Da RosaNo ratings yet
- Datasheet M-410iB-140HDocument1 pageDatasheet M-410iB-140HByronNo ratings yet
- Datasheet M-410iB-700 PDFDocument1 pageDatasheet M-410iB-700 PDFDiego Alejandro Gallardo IbarraNo ratings yet
- Datasheet M-10iA-12Document1 pageDatasheet M-10iA-12EVA motionNo ratings yet
- Datasheet M 10ia 10MDocument1 pageDatasheet M 10ia 10MHeriberto LopezNo ratings yet
- Datasheet M-710iC-20LDocument1 pageDatasheet M-710iC-20LAntonio SanchezNo ratings yet
- Datasheet LRMate-200iD-7LCDocument1 pageDatasheet LRMate-200iD-7LCPremium WzorceNo ratings yet
- Fanuc TF - CR-35 - enDocument2 pagesFanuc TF - CR-35 - enpacamu05No ratings yet
- M-900 Robot Working Range: 360 KG 2655 MMDocument1 pageM-900 Robot Working Range: 360 KG 2655 MMKAKAKNo ratings yet
- Datasheet M 900ib 360Document1 pageDatasheet M 900ib 360ariyanto prasetioNo ratings yet
- Datasheet M 710ic 70Document1 pageDatasheet M 710ic 70Diego CamachoNo ratings yet
- M900iB 400LDocument1 pageM900iB 400LLeonardo AlexNo ratings yet
- Datasheet PaintMate 200ia 5LDocument1 pageDatasheet PaintMate 200ia 5LRafa LozanoNo ratings yet
- R-2000iC-125L HOJA DATOS PDFDocument1 pageR-2000iC-125L HOJA DATOS PDFgatolefuNo ratings yet
- Datasheet M 2000ia 900LDocument1 pageDatasheet M 2000ia 900LM. NaardingNo ratings yet
- Datasheet M-10iA-10MDocument1 pageDatasheet M-10iA-10MGTutorNo ratings yet
- Otc Ax-V4Document2 pagesOtc Ax-V4Cesar A.C ZapateiroNo ratings yet
- Servo Positioner: Positioner For Coordinated Arc Welding Robot SystemDocument4 pagesServo Positioner: Positioner For Coordinated Arc Welding Robot SystemRicardo Castro SalazarNo ratings yet
- Datasheet LRMate-200iD-4S - KUKADocument1 pageDatasheet LRMate-200iD-4S - KUKAJOSE MANUELNo ratings yet
- MC400L BrochureDocument2 pagesMC400L BrochureXanti Zabala Da RosaNo ratings yet
- HS220Document8 pagesHS220아몰레드No ratings yet
- M-410 Robot Working Range: 315 KG 3143 MMDocument1 pageM-410 Robot Working Range: 315 KG 3143 MMdomepetuNo ratings yet
- RobotsDocument8 pagesRobotsRicardo Miranda Jr.0% (1)
- Datasheet M-710iC-70TDocument1 pageDatasheet M-710iC-70TjosjcrsNo ratings yet
- M-710 Robot Working Range: 70 KG 2050 MMDocument1 pageM-710 Robot Working Range: 70 KG 2050 MMjosjcrsNo ratings yet
- SRA100/166/210/166L/120EL: World Class Speed RobotDocument2 pagesSRA100/166/210/166L/120EL: World Class Speed RobotXanti Zabala Da RosaNo ratings yet
- Outstanding Path Accuracy: Maximum Precision andDocument2 pagesOutstanding Path Accuracy: Maximum Precision andJorge GodielNo ratings yet
- Datasheet M 410ib 140HDocument1 pageDatasheet M 410ib 140HJonathan RodriguezNo ratings yet
- MZ07-02 Standard SpecificationsDocument18 pagesMZ07-02 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- (Synced) AL6002 User ManualDocument8 pages(Synced) AL6002 User ManualchidyamakuniNo ratings yet
- Sinamics g120 PN at s7-1200 Docu v1d3 enDocument1 pageSinamics g120 PN at s7-1200 Docu v1d3 enAsim PedicNo ratings yet
- Kuka YouBot Technical Specs PDFDocument4 pagesKuka YouBot Technical Specs PDFWilliam GuarientiNo ratings yet
- r2h 1909Document2 pagesr2h 1909Daniel Arce RomeroNo ratings yet
- Datasheet M 2000ia 2300Document1 pageDatasheet M 2000ia 2300carlosdr.05.09.1993No ratings yet
- SRA100H-SRA133HL Rev2 BrochureDocument2 pagesSRA100H-SRA133HL Rev2 BrochureXanti Zabala Da RosaNo ratings yet
- Datasheet-Cr7ia L EnglishDocument1 pageDatasheet-Cr7ia L EnglishNgộ Không TônNo ratings yet
- SC700 Standard SpecificationsDocument15 pagesSC700 Standard SpecificationsXanti Zabala Da RosaNo ratings yet
- DWD Summo AllDocument4 pagesDWD Summo AllMario Allesina JuniorNo ratings yet
- Kurt Pamvouxoglou KDE11 20SS Service - Manual PDFDocument111 pagesKurt Pamvouxoglou KDE11 20SS Service - Manual PDFرحمة هداية اللهNo ratings yet
- Especificaciones Motor CatDocument5 pagesEspecificaciones Motor CatWalter TaucherNo ratings yet
- Braden Bga06 Manual de PartesDocument24 pagesBraden Bga06 Manual de PartesMauricio Ariel H. OrellanaNo ratings yet
- HKS Corporate IntroductionDocument41 pagesHKS Corporate IntroductionfarizzamzamNo ratings yet
- Pipe Grooving Machine Latest 2018Document8 pagesPipe Grooving Machine Latest 2018anon_667646586100% (1)
- MCQ in Machine Design and Shop Practice Part 3 ME Board ExamDocument17 pagesMCQ in Machine Design and Shop Practice Part 3 ME Board Examtagne simo rodrigueNo ratings yet
- Ford Diesel 3-Cylinder Liquid-Cooled 201 Ci: (3.3 L) (112 X 112 MM)Document4 pagesFord Diesel 3-Cylinder Liquid-Cooled 201 Ci: (3.3 L) (112 X 112 MM)Alex CastilloNo ratings yet
- Scramjet EngineDocument2 pagesScramjet EngineSãröj ShâhNo ratings yet
- Plate No. 2 - Roller Chains, Sprocket and Wire RopeDocument5 pagesPlate No. 2 - Roller Chains, Sprocket and Wire Ropeanton pogiNo ratings yet
- NOLH NT ENG 50Hz PDFDocument50 pagesNOLH NT ENG 50Hz PDFarielbankiNo ratings yet
- Clutch UnitDocument3 pagesClutch Unitpavel35No ratings yet
- Main Relief 302.5Document11 pagesMain Relief 302.5Yudi setiawanNo ratings yet
- Ecs Service Technical Handbook: Publ. No. 923862-0014 00-08Document31 pagesEcs Service Technical Handbook: Publ. No. 923862-0014 00-08Trần Quốc ĐôngNo ratings yet
- Caterpillar EnginesDocument134 pagesCaterpillar EnginesFouad Bel100% (1)
- Skoda Octavia Mk1 04 Heating Air ConditioningDocument118 pagesSkoda Octavia Mk1 04 Heating Air Conditioningdaliborjaro80% (5)
- Vendor ListDocument5 pagesVendor Listdarwish1982No ratings yet
- 3750 Pulpress Pressurisation Unit: Installation and Operating InstructionsDocument14 pages3750 Pulpress Pressurisation Unit: Installation and Operating InstructionsRonNo ratings yet
- Eee-V-dcmachines and Synchronous Machines (10ee54) - AssignmentDocument4 pagesEee-V-dcmachines and Synchronous Machines (10ee54) - AssignmentchaitanyaNo ratings yet
- D6R-2HM-Cylinder Head - InstallDocument6 pagesD6R-2HM-Cylinder Head - InstallalbundyNo ratings yet
- Grasso Screw Compressor Package Pi - tcm11 38504Document84 pagesGrasso Screw Compressor Package Pi - tcm11 38504Twfeek AhmedNo ratings yet
- Fish Pumping Applications: Excellent Power & Industrial SolutionsDocument4 pagesFish Pumping Applications: Excellent Power & Industrial SolutionsAnonymous sOAsuDLXNo ratings yet
- IO-360-L2A Parts Catalog PC-406-L2A PDFDocument75 pagesIO-360-L2A Parts Catalog PC-406-L2A PDFPiyushNo ratings yet
- 350 Series Electrohydraulic Actuators: Bulletin 61.5:350Document12 pages350 Series Electrohydraulic Actuators: Bulletin 61.5:350Datt NguyenNo ratings yet
- Method Statement of Chiller Preventive MaintenanceDocument5 pagesMethod Statement of Chiller Preventive MaintenanceBalajiNo ratings yet