Download as docx, pdf, or txt
You might also like
- 23.upravljacki Sistem-OpsteDocument26 pages23.upravljacki Sistem-OpsteEmaNo ratings yet
- Fazi UpravljanjeDocument33 pagesFazi Upravljanjea9d9o30507No ratings yet
- Pogonski MostDocument46 pagesPogonski MostAndrej Marina Zoran MiloševićNo ratings yet
- www2 PR IIIDocument23 pageswww2 PR IIISaša MitrićNo ratings yet
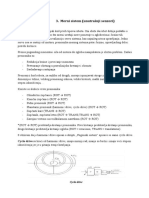
- Merni Sistem (Unutrasnji Senzori)Document7 pagesMerni Sistem (Unutrasnji Senzori)Мирослав АлександровићNo ratings yet
- ЕLEMENTI ZA PRENOS SNAGEDocument21 pagesЕLEMENTI ZA PRENOS SNAGEИлијаСтефановићNo ratings yet
- Grupa2Document23 pagesGrupa2Nebojsa VasicNo ratings yet
- Zglobni Prenosnik Golfa 2Document17 pagesZglobni Prenosnik Golfa 2Славко СтојићNo ratings yet
- 07 РЕМЕНИ ПРЕНОСDocument2 pages07 РЕМЕНИ ПРЕНОСSenad DolovacNo ratings yet
- JA PraksaDocument2 pagesJA PraksaOgnjene StambolovićuNo ratings yet
- Predavanje 05 Gibanje Krutog TijelaDocument27 pagesPredavanje 05 Gibanje Krutog Tijelabhstudent_537083349No ratings yet
- Mehanika Leta ProjektilaDocument6 pagesMehanika Leta ProjektilaМилованБајић50% (2)
- 3.glavni Delovi KU StrugovaDocument1 page3.glavni Delovi KU StrugovamilicaNo ratings yet
- Zglobni PrenosniciDocument7 pagesZglobni PrenosniciИван Радивојевић50% (2)
- Uvod-Zupcasti PrenosniciDocument14 pagesUvod-Zupcasti PrenosniciMiljan RancicNo ratings yet
- 1 - Kinematika - Osnovni Pojmovi - 2020-21Document30 pages1 - Kinematika - Osnovni Pojmovi - 2020-21NikoNo ratings yet
- Елементи за преношење снагеDocument2 pagesЕлементи за преношење снагеSrdjan DjordjevicNo ratings yet
- 06 MЕХАНИЗМИ 3A ПРЕТВАРАЊЕ ЈЕДНОГ КРУЖНОГDocument3 pages06 MЕХАНИЗМИ 3A ПРЕТВАРАЊЕ ЈЕДНОГ КРУЖНОГSenad DolovacNo ratings yet
- Upravljacki mehanizam-KIPMVDocument16 pagesUpravljacki mehanizam-KIPMVSerifShekyRondicNo ratings yet
- Displej Lista: Osnovni Koncepti Grafičkog ProgramiranjaDocument46 pagesDisplej Lista: Osnovni Koncepti Grafičkog ProgramiranjaSultić AdelisaNo ratings yet
- Elementi Automatizacije 4 DeoDocument5 pagesElementi Automatizacije 4 DeoMarkoNo ratings yet
- ME II Test Pitanja I OdgovoriDocument10 pagesME II Test Pitanja I Odgovorialdinsuta_94No ratings yet
- Vozna Dinamika 4 Kolokvijum SREDJENODocument4 pagesVozna Dinamika 4 Kolokvijum SREDJENOgdfgdNo ratings yet
- KOMPARATORIDocument30 pagesKOMPARATORIMilan Milosev100% (2)
- 01 Masinski Elementi 2 PrenosniciDocument29 pages01 Masinski Elementi 2 PrenosniciRKNo ratings yet
- Masinski Elementi 2 PrenosniciDocument29 pagesMasinski Elementi 2 PrenosniciRikiNo ratings yet
- 5.kompjuterski Upravljani Sistemi Za Obradu Rezanjem 2Document39 pages5.kompjuterski Upravljani Sistemi Za Obradu Rezanjem 2Mateja GlamočakNo ratings yet
- Pitanja Iz EA Za Popravku OceneDocument3 pagesPitanja Iz EA Za Popravku OceneNikola CvijeticNo ratings yet
- Kinematika Drugi Kolok FinalDocument4 pagesKinematika Drugi Kolok FinalMrkiNo ratings yet
- CVBDocument21 pagesCVBdaliborNo ratings yet
- Dinamika Krutog TelaDocument5 pagesDinamika Krutog TelaAleksandar CiricNo ratings yet
- Елементи Машина и МеханизамаDocument17 pagesЕлементи Машина и МеханизамаdaniloaksicNo ratings yet
- Seminarski RadDocument16 pagesSeminarski Radtmama670No ratings yet
- Menjacki PrenosniciDocument27 pagesMenjacki PrenosniciNemanja DivnicNo ratings yet
- 01 Masinski Elementi 2 Prvo Predavanje PrenosniciDocument29 pages01 Masinski Elementi 2 Prvo Predavanje PrenosniciMarko MajstorovicNo ratings yet
- CigreDocument9 pagesCigreМилан ЛукићNo ratings yet
- Geodezija - Totalna StanicaDocument22 pagesGeodezija - Totalna StanicaPredrag ZivkovicNo ratings yet
- Lekcija22-Nacin Obrade SignalaDocument9 pagesLekcija22-Nacin Obrade Signalabusniess.makarastudioNo ratings yet
- 17. Избор Вертикалне и Хоризонталне УчестаностиDocument10 pages17. Избор Вертикалне и Хоризонталне УчестаностиJelena Ilic StepanovicNo ratings yet
- Gipki Mehanizmi Predavanja PlatformeDocument124 pagesGipki Mehanizmi Predavanja PlatformeGogyNo ratings yet
- Mehanicki Prenosnici SnageDocument9 pagesMehanicki Prenosnici SnageIlija BozovicNo ratings yet
- Skripta DV Konstrukcija - 05 Menjački PrenosniciDocument10 pagesSkripta DV Konstrukcija - 05 Menjački PrenosniciVeljko MiletićNo ratings yet
- Tehnike Geodetskih MerenjaDocument31 pagesTehnike Geodetskih MerenjaPredrag ZivkovicNo ratings yet
- Питања и одговори за II контролну вежбуDocument4 pagesПитања и одговори за II контролну вежбуJelena IlicNo ratings yet
- Давачи броја обртаја и брзинеDocument29 pagesДавачи броја обртаја и брзинеJovo PavlovicNo ratings yet
- KInematika PuskiceDocument2 pagesKInematika PuskiceMrkiNo ratings yet
- Kinematika MAŠINA ALATKIDocument20 pagesKinematika MAŠINA ALATKIHusein LagumdzijaNo ratings yet
- Knjiga Pruge 2Document12 pagesKnjiga Pruge 2kami_NPNo ratings yet
- RobotikaDocument7 pagesRobotikaAnaMarija1994No ratings yet
- 001 - Елементи за преношење снаге - УводDocument11 pages001 - Елементи за преношење снаге - УводsortehnoartNo ratings yet
- СЕНИНАРСКИ ИЗ ФИЗИКЕDocument13 pagesСЕНИНАРСКИ ИЗ ФИЗИКЕcz2d9jmrbjNo ratings yet
- 04 Клипни механизамDocument3 pages04 Клипни механизамSenad Dolovac100% (1)
- 01 КРЕТАЊЕ КОД АЛАТНИХ МАШИНАDocument3 pages01 КРЕТАЊЕ КОД АЛАТНИХ МАШИНАSenad DolovacNo ratings yet
- КИНЕМАТИКАDocument15 pagesКИНЕМАТИКАPetra MilanovićNo ratings yet
- Мерење и управљањеDocument20 pagesМерење и управљањеNenad kontaktNo ratings yet
- Automatsko UpravljanjeDocument13 pagesAutomatsko UpravljanjeNikola AnteljevićNo ratings yet
- ЗАВАР ЛЕМ ЗАК ЛЕПDocument10 pagesЗАВАР ЛЕМ ЗАК ЛЕПksenijaksenijaNo ratings yet
- Pravilnik Prava5Document17 pagesPravilnik Prava5ksenijaksenijaNo ratings yet
- ПРЕНОСНИЦИ СВИDocument7 pagesПРЕНОСНИЦИ СВИksenijaksenijaNo ratings yet
- Prilog 9 - Ima Jedna MarijaDocument1 pagePrilog 9 - Ima Jedna MarijaksenijaksenijaNo ratings yet
- Tema 2Document43 pagesTema 2ksenijaksenijaNo ratings yet
- ЗАковани спојеви - тDocument5 pagesЗАковани спојеви - тksenijaksenijaNo ratings yet
- BlokNastavaTermin PrečišćenaDocument14 pagesBlokNastavaTermin PrečišćenaksenijaksenijaNo ratings yet
- М11 Мех 09Document4 pagesМ11 Мех 09ksenijaksenijaNo ratings yet
- Е37 - Основе машинства - полугодиштеDocument7 pagesЕ37 - Основе машинства - полугодиштеksenijaksenijaNo ratings yet
- Obrazac Za Formativno OcenjivanjeDocument1 pageObrazac Za Formativno OcenjivanjeksenijaksenijaNo ratings yet
- Eupis Uputstvo Za RoditeljeqweDocument17 pagesEupis Uputstvo Za RoditeljeqweksenijaksenijaNo ratings yet
- М11 планDocument3 pagesМ11 планksenijaksenijaNo ratings yet
- 01 Standardi Kvalifikacije TMDocument5 pages01 Standardi Kvalifikacije TMksenijaksenijaNo ratings yet