Download as pdf or txt
You might also like
- Pinout Diagramas PCM 154 Pines Cruze 1.6 1.8 2.0 2012-2015Document20 pagesPinout Diagramas PCM 154 Pines Cruze 1.6 1.8 2.0 2012-2015Golf variant Pineapple100% (10)
- A New Method For Blocking Third-Zone Distance Relays During Stable Power SwingsDocument8 pagesA New Method For Blocking Third-Zone Distance Relays During Stable Power SwingsRahul SawantNo ratings yet
- The Classification of Power Swing Based On PNN and MLPNN: Ahmad Farid Bin Abidin, Azah Mohamed, Hussein ShareefDocument9 pagesThe Classification of Power Swing Based On PNN and MLPNN: Ahmad Farid Bin Abidin, Azah Mohamed, Hussein ShareeffpttmmNo ratings yet
- 1 s2.0 S0142061518305763 MainDocument11 pages1 s2.0 S0142061518305763 MainAnamika YadavNo ratings yet
- A Classification Approach Using Support Vector - 12Document10 pagesA Classification Approach Using Support Vector - 12Aritra DasguptaNo ratings yet
- Change of Energy in Current SignalDocument6 pagesChange of Energy in Current SignalAshley SureshNo ratings yet
- Distance Protection During Asymmetrical Power Swings: Challenges and SolutionsDocument10 pagesDistance Protection During Asymmetrical Power Swings: Challenges and SolutionsRahul SawantNo ratings yet
- Data-Mining-Based Fault During Power Swing Identification in Power Transmission SystemDocument10 pagesData-Mining-Based Fault During Power Swing Identification in Power Transmission SystemFelix GamarraNo ratings yet
- Superimposed - Swing (Dec 2022) PDFDocument11 pagesSuperimposed - Swing (Dec 2022) PDFSubhadeep PaladhiNo ratings yet
- Paper 6Document4 pagesPaper 6Maulik PandyaNo ratings yet
- Bora Scu 2015Document6 pagesBora Scu 2015K.T.No ratings yet
- Secure Third Zone Operation of Distance Relay Using Impedance Prediction ApproachDocument6 pagesSecure Third Zone Operation of Distance Relay Using Impedance Prediction ApproachTufail AlamNo ratings yet
- A Wavelet Multiresolution Analysis For Location of Faults On Transmission LinesDocument11 pagesA Wavelet Multiresolution Analysis For Location of Faults On Transmission LinesengshimaaNo ratings yet
- Ijertv13n11 99Document7 pagesIjertv13n11 99Nandi ?No ratings yet
- Adaptive Distance Protection Compensated: Transmission LinesDocument6 pagesAdaptive Distance Protection Compensated: Transmission LinesthavaselvanNo ratings yet
- A New Algorithm To Prevent Maloperation of Distance Protection Zone 3 During Wide Are DisturbancesDocument13 pagesA New Algorithm To Prevent Maloperation of Distance Protection Zone 3 During Wide Are DisturbanceskponramNo ratings yet
- Grid-Tie Three-Phase Inverter With Active and Reactive Power Flow Control CapabilityDocument9 pagesGrid-Tie Three-Phase Inverter With Active and Reactive Power Flow Control CapabilityHoàngNguyễnNo ratings yet
- IJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision TreeDocument18 pagesIJEEE - Protection Scheme For Renewable Energy Sources Based Smart Grid Using Stockwell Transform and Rule Based Decision Treeiaset123No ratings yet
- 25 PDFDocument6 pages25 PDFNithya VelamNo ratings yet
- Voltage Sag Assessment of Distribution System Using Monte Carlo SimulationDocument6 pagesVoltage Sag Assessment of Distribution System Using Monte Carlo SimulationJAGANNATH PATRANo ratings yet
- DWT Based Symmetrical Fault Detection Method During Power SwingDocument6 pagesDWT Based Symmetrical Fault Detection Method During Power SwingFabien CallodNo ratings yet
- EstimatingZero-sequence ImpedanceDocument10 pagesEstimatingZero-sequence ImpedanceirfanWPKNo ratings yet
- PMU Optimal Placement Using Sensitivity Analysis For Power Systems Fault LocationDocument6 pagesPMU Optimal Placement Using Sensitivity Analysis For Power Systems Fault LocationRajesh GangwarNo ratings yet
- Mpce Feb 2023 SaDocument11 pagesMpce Feb 2023 SaDr O H GuptaNo ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionDocument10 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-of-Step ProtectionROHIT SINGHNo ratings yet
- SPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDFDocument7 pagesSPWM-based D - Digital Control For Paralleled 3 - Grid-Connected Inverters PDF张明No ratings yet
- Synchro Measurement Based Intelligent Fault Identification and Location of Parallel Transmission LineDocument6 pagesSynchro Measurement Based Intelligent Fault Identification and Location of Parallel Transmission LineSundaraPandiyanNo ratings yet
- Detection of Transmission Line Faults Using Discrete Wavelet TransformDocument6 pagesDetection of Transmission Line Faults Using Discrete Wavelet Transformwvargas926No ratings yet
- Application of Equal Area Criterion Conditions in The Time Domain For Out-Of-Step Protection-2010Document11 pagesApplication of Equal Area Criterion Conditions in The Time Domain For Out-Of-Step Protection-2010DanielAlejandroRamosQueroNo ratings yet
- A Very Fast Unblocking Scheme For Distance Protection To Detect Symmetrical Faults During Power SwingsDocument6 pagesA Very Fast Unblocking Scheme For Distance Protection To Detect Symmetrical Faults During Power SwingsFelix GamarraNo ratings yet
- Power Swing Detection in The Presence of Solar Photovoltaic PlantDocument19 pagesPower Swing Detection in The Presence of Solar Photovoltaic PlantRajendra MullapudiNo ratings yet
- A New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEDocument8 pagesA New Method of Voltage Sag and Swell Detection: Raj Naidoo, Member, IEEE, and Pragasen Pillay, Fellow, IEEEjcrodriguez83No ratings yet
- A Novel Scheme To Identify Symmetrical Faults Occurring During Power SwingsDocument6 pagesA Novel Scheme To Identify Symmetrical Faults Occurring During Power SwingsFelix GamarraNo ratings yet
- Fast and Distortion-Free Short-Circuit Detection and Protection Scheme With Fault Ride-Through Capability Applied To Four-Leg VSIDocument12 pagesFast and Distortion-Free Short-Circuit Detection and Protection Scheme With Fault Ride-Through Capability Applied To Four-Leg VSIGuillermo GarciaNo ratings yet
- Wavelet Based Energy Function For Symmetrical Fault Detection During Power SwingDocument6 pagesWavelet Based Energy Function For Symmetrical Fault Detection During Power SwingFelix GamarraNo ratings yet
- 10.1109@CETIC4.2018.8531024 Hari Deepa Savier Ic4 PDFDocument6 pages10.1109@CETIC4.2018.8531024 Hari Deepa Savier Ic4 PDFAnonymous DbmKEDxNo ratings yet
- Small Signal Modeling of Inverter-Based Grid-Connected Microgrid To Determine The Zero-Pole Drift Control With Dynamic Power Sharing Controller PDFDocument7 pagesSmall Signal Modeling of Inverter-Based Grid-Connected Microgrid To Determine The Zero-Pole Drift Control With Dynamic Power Sharing Controller PDFGeovannyNo ratings yet
- Phasor Measurement Unit (PMU) Based Wide Area Protection SystemDocument3 pagesPhasor Measurement Unit (PMU) Based Wide Area Protection Systemamina mazharNo ratings yet
- Robust Non-Communication Line Protection Scheme Using Novel QuantitiesDocument8 pagesRobust Non-Communication Line Protection Scheme Using Novel QuantitiessunitharajababuNo ratings yet
- An Accurate Noniterative Fault-Location Technique For Low-Voltage DC MicrogridDocument7 pagesAn Accurate Noniterative Fault-Location Technique For Low-Voltage DC MicrogridKomal SinghNo ratings yet
- Wavelet-Based Method For Transmission Line Fault Detection and Classification During Power SwingDocument5 pagesWavelet-Based Method For Transmission Line Fault Detection and Classification During Power SwingArmando MaloneNo ratings yet
- Transmission Line Fault Detection and Classification: Abstract-Transmission Line Protection Is An Important Issue inDocument8 pagesTransmission Line Fault Detection and Classification: Abstract-Transmission Line Protection Is An Important Issue innidhichauhan0288No ratings yet
- Trafo 3 AsdDocument4 pagesTrafo 3 AsdAchyar Maulana PratamaNo ratings yet
- Presentation On PMU Based Transmission Line Protection Scheme (A Paper Summary)Document16 pagesPresentation On PMU Based Transmission Line Protection Scheme (A Paper Summary)samuelNo ratings yet
- A Wavelet Power Based Algorithm For Synchronous Generator ProtectionDocument6 pagesA Wavelet Power Based Algorithm For Synchronous Generator ProtectionsunitharajababuNo ratings yet
- Icit 2013 6505944Document6 pagesIcit 2013 6505944Mohamed SobhyNo ratings yet
- Busbar Protection - A ReviewDocument5 pagesBusbar Protection - A ReviewPrajiWazharyNo ratings yet
- CIRED2015 0415 FinalDocument5 pagesCIRED2015 0415 FinalMarudavanan SomasundaramNo ratings yet
- Electrical Power and Energy Systems: J. Zhang, Z.Y. He, S. Lin, Y.B. Zhang, Q.Q. QianDocument10 pagesElectrical Power and Energy Systems: J. Zhang, Z.Y. He, S. Lin, Y.B. Zhang, Q.Q. Qianatheer lu'ayNo ratings yet
- N-1 Maximum Transfer CapabilityDocument6 pagesN-1 Maximum Transfer CapabilityElmonster10No ratings yet
- A Harmonic Detection For Grid Connected PV Systems Under Non Linear Load Using Cuk ConverterDocument4 pagesA Harmonic Detection For Grid Connected PV Systems Under Non Linear Load Using Cuk ConverterArivumaniNo ratings yet
- Distance Protection Performance AnalysisDocument6 pagesDistance Protection Performance Analysiskushwah9kpriyaNo ratings yet
- Online_Sensitive_Turn-to-Turn_Fault_DetectionDocument10 pagesOnline_Sensitive_Turn-to-Turn_Fault_DetectionElliton BrandãoNo ratings yet
- Applications of Fuzzy-Logic-Wavelet-Based Techniques For Transformers Inrush Currents Identification and Power Systems Faults ClassificationDocument7 pagesApplications of Fuzzy-Logic-Wavelet-Based Techniques For Transformers Inrush Currents Identification and Power Systems Faults ClassificationNandi ?No ratings yet
- Post-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsDocument9 pagesPost-Disturbance Transient Stability Status Prediction Using Synchrophasor MeasurementsSukhjinderNo ratings yet
- Energy Conversion and Management: Kamel Barra, Djamel RahemDocument10 pagesEnergy Conversion and Management: Kamel Barra, Djamel Rahemchikha saidNo ratings yet
- ZERO CrossingDocument6 pagesZERO CrossingjoseNo ratings yet
- PID5829865Document7 pagesPID5829865hemavathi114071No ratings yet
- A Modular Neuro-Wavelet Based Non-Unit Protection Scheme For Zone Identification and Fault Location in Six-Phase Transmission LineDocument17 pagesA Modular Neuro-Wavelet Based Non-Unit Protection Scheme For Zone Identification and Fault Location in Six-Phase Transmission LineNithya VelamNo ratings yet
- Analysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLDocument3 pagesAnalysis and Review - Secondary Arc Extinction Auto Reclosing For 765 KV EHV TLCarlos Lino Rojas AgüeroNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- Omala S2G BrochureDocument2 pagesOmala S2G BrochureMudabbir Shan AhmedNo ratings yet
- The in Analysis Databases:: ScienceDocument33 pagesThe in Analysis Databases:: Sciencegreeen.pat6918No ratings yet
- Building Permit Application - iBPLSDocument3 pagesBuilding Permit Application - iBPLSShieNo ratings yet
- Tla ch03Document2 pagesTla ch03api-334420312No ratings yet
- AtracuriumDocument2 pagesAtracuriumFederico Andales50% (2)
- Capitulo 1 de Libro Heat Exchanger Design HandbookDocument2 pagesCapitulo 1 de Libro Heat Exchanger Design HandbookJOSE RICARDO DURANNo ratings yet
- Accidental Loading On BuildingsDocument22 pagesAccidental Loading On Buildingssubin_mampallyNo ratings yet
- Sample Applications For .NET DevelopersDocument2 pagesSample Applications For .NET Developersreena jadhavNo ratings yet
- PZ3-D0821 Porter S Fresco-Aus SDS PDFDocument5 pagesPZ3-D0821 Porter S Fresco-Aus SDS PDFdantiNo ratings yet
- Abraline PDFDocument32 pagesAbraline PDFAmel DurakovicNo ratings yet
- Coop Chart of AccountsDocument30 pagesCoop Chart of AccountsAmalia Dela Cruz100% (17)
- Engineering Mechanics Mech-A 2021-22 Assignment-IIDocument32 pagesEngineering Mechanics Mech-A 2021-22 Assignment-IIunachieved FilmsNo ratings yet
- Payten Fite - Client Schedule - Sheet1Document3 pagesPayten Fite - Client Schedule - Sheet1api-578044164No ratings yet
- Template Appointment Lette V1Document9 pagesTemplate Appointment Lette V1mehulbaldwaNo ratings yet
- From "Windows Internals" by Mark Russinovich, David A. Solomon, Alex IonescuDocument2 pagesFrom "Windows Internals" by Mark Russinovich, David A. Solomon, Alex IonescumeridasNo ratings yet
- 174 - 13 UREA PDF - 28-Euro Procedure SheetDocument2 pages174 - 13 UREA PDF - 28-Euro Procedure SheetP VijayaNo ratings yet
- LG HR698D-M User ManualDocument92 pagesLG HR698D-M User ManualpaulkupasNo ratings yet
- MD30C User's ManualDocument17 pagesMD30C User's ManualAMIR GHASEMINo ratings yet
- CORDIC Based BPSK ModulatorDocument5 pagesCORDIC Based BPSK ModulatorPuneet BansalNo ratings yet
- Straight Thread Size Comparison Chart: Catalog 3501EDocument1 pageStraight Thread Size Comparison Chart: Catalog 3501EBaoLCNo ratings yet
- Wa0010Document33 pagesWa001020bcs3236 ayush pratap singhNo ratings yet
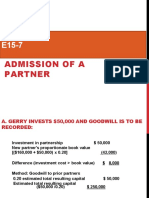
- E15-7 AdmissionDocument12 pagesE15-7 AdmissionBorussian RamaNo ratings yet
- Operating Instructions Automatic Air Inlet ValveDocument4 pagesOperating Instructions Automatic Air Inlet ValveelecbaNo ratings yet
- Introduction To Artificial IntelligenceDocument136 pagesIntroduction To Artificial IntelligenceHema BhagatNo ratings yet
- Superfoods: English Level Pre - A1Document4 pagesSuperfoods: English Level Pre - A1Ana CelestinoNo ratings yet
- Instant Download Ebook PDF Fundamentals of Differential Equations and Boundary Value Problems 7th Edition PDF ScribdDocument41 pagesInstant Download Ebook PDF Fundamentals of Differential Equations and Boundary Value Problems 7th Edition PDF Scribdwalter.herbert73398% (44)
- Course Name - Applied Mechanics Course Code - 22203 Name of TopicDocument8 pagesCourse Name - Applied Mechanics Course Code - 22203 Name of TopicBajirao JetithorNo ratings yet
- TLC Remittance Lean SpecificationDocument8 pagesTLC Remittance Lean SpecificationAniket WaghavkarNo ratings yet
- STD0002 Rev4 Standard de Colores Cable 37C PDFDocument8 pagesSTD0002 Rev4 Standard de Colores Cable 37C PDFLuis Angel PerezNo ratings yet