Download as doc, pdf, or txt
You might also like
- Computational Propaganda Political Parties, Politicians, and Political Manipulation On Social Media (Samuel C - Woolley, Philip N. Howard)Document273 pagesComputational Propaganda Political Parties, Politicians, and Political Manipulation On Social Media (Samuel C - Woolley, Philip N. Howard)João SousaNo ratings yet
- General Curse Breaking PrayersDocument12 pagesGeneral Curse Breaking Prayersmotmagic100% (2)
- Urdu To English DictionaryDocument231 pagesUrdu To English Dictionaryarun_beriwal67% (6)
- Project Report GR 01 Maes BDocument9 pagesProject Report GR 01 Maes BFAISAL AHMED MRIDHA FATINNo ratings yet
- ANDRAWDocument6 pagesANDRAWOdoch HerbertNo ratings yet
- Department of Technical EducationDocument12 pagesDepartment of Technical EducationDinesh NNo ratings yet
- Ultrasonic Sensor Based Smart Cap As EleDocument5 pagesUltrasonic Sensor Based Smart Cap As ElerahuNo ratings yet
- CHNDDocument22 pagesCHNDchandhuNo ratings yet
- Sample Document For Hardware Project-IOT Lab-Dr. Anup DeyDocument20 pagesSample Document For Hardware Project-IOT Lab-Dr. Anup Deytharunreddy999000No ratings yet
- S.D.M. College of Engineering & Technology, Dharwad - 580 002Document8 pagesS.D.M. College of Engineering & Technology, Dharwad - 580 002Kumar NeerajNo ratings yet
- Automatic Hand Sanitizer Dispenser Using Arduino: Final Year Project OnDocument24 pagesAutomatic Hand Sanitizer Dispenser Using Arduino: Final Year Project OnadhirajbaneNo ratings yet
- Minor ProjectDocument22 pagesMinor Project205.Vyshnavi GrandhiNo ratings yet
- Pir Sensor (1176)Document15 pagesPir Sensor (1176)Harsha VijjapuNo ratings yet
- Street Light Automation Using IoTDocument43 pagesStreet Light Automation Using IoTAshwin100% (1)
- Hand Motion Controlled Robotic ArmDocument5 pagesHand Motion Controlled Robotic ArmRameshkumar JayaramanNo ratings yet
- Ultrasonic Distance SensorDocument6 pagesUltrasonic Distance SensorJunaid AhmedNo ratings yet
- Design and Implementation of Line Follower Robot Using Arduino MicrocontrollerDocument4 pagesDesign and Implementation of Line Follower Robot Using Arduino MicrocontrollerFahru ZainiNo ratings yet
- Arduino Based Smart Blind Stick: Aayush Saini, Mrs. Pooja Sharma, HMMMDocument5 pagesArduino Based Smart Blind Stick: Aayush Saini, Mrs. Pooja Sharma, HMMMAayush SainiNo ratings yet
- School of Engineering and Natural Sciences: Introduction To EE/COEDocument8 pagesSchool of Engineering and Natural Sciences: Introduction To EE/COEextazyfox2No ratings yet
- .Automatic Room Light Controller Using Arduino and PIR SensorDocument4 pages.Automatic Room Light Controller Using Arduino and PIR SensorLÂM PHẠM NHƯ100% (1)
- Smart Blind Stick Using ArduinoDocument8 pagesSmart Blind Stick Using ArduinoABHISEK SAHOONo ratings yet
- Smart Blind Stick Using ArduinoDocument8 pagesSmart Blind Stick Using ArduinoAditya PrakashNo ratings yet
- CHNDDocument22 pagesCHNDchandhuNo ratings yet
- Gesture Control Robot Using ArduinoDocument3 pagesGesture Control Robot Using ArduinoEditor IJTSRDNo ratings yet
- GRP ProjectDocument8 pagesGRP ProjectgunmeetsinghNo ratings yet
- Obstacle Avoidance RobotDocument9 pagesObstacle Avoidance Robotnagasaikiran ponnapalliNo ratings yet
- Ultrasonic Sensor Object Detection System Project ReportDocument10 pagesUltrasonic Sensor Object Detection System Project Reportsltanbrhane50No ratings yet
- Chapter 3Document19 pagesChapter 3MUBARAK RAHAMAN HNo ratings yet
- Autonomous Obstacle Avoiding and Path Following RoverDocument12 pagesAutonomous Obstacle Avoiding and Path Following RoverIndian MusicNo ratings yet
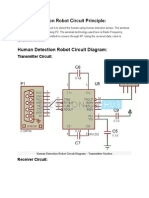
- Human Detection Robot Circuit PrincipleDocument4 pagesHuman Detection Robot Circuit PrincipleAli KhanNo ratings yet
- Ultra Sonic Car Using AudinoDocument33 pagesUltra Sonic Car Using AudinoVasu ThakurNo ratings yet
- Controlling of Home Appliances Using Arduino UNO BoardDocument4 pagesControlling of Home Appliances Using Arduino UNO BoardZia Ul IslamNo ratings yet
- Project Report On Obstacle Avoiding RobotDocument13 pagesProject Report On Obstacle Avoiding Robotarunraj SuresNo ratings yet
- Human Detection Robot 1Document38 pagesHuman Detection Robot 1STAR E WORLDNo ratings yet
- PRJ p677Document8 pagesPRJ p677Rheymar BarcalaNo ratings yet
- Obstacle Car 1Document19 pagesObstacle Car 1kashyrishabh03No ratings yet
- Human Detection Robot DetailsDocument6 pagesHuman Detection Robot DetailschirayilrichardNo ratings yet
- Smart GloveDocument8 pagesSmart GloveRakshit VigNo ratings yet
- Thesis Body LettersDocument21 pagesThesis Body LettersKay Kay LinnNo ratings yet
- Ultrasonic Blindmate With GPS TrackingDocument4 pagesUltrasonic Blindmate With GPS TrackingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Project ReportDocument8 pagesProject ReportLeo UltraNo ratings yet
- Ijet V3i6p90Document9 pagesIjet V3i6p90International Journal of Engineering and TechniquesNo ratings yet
- Research Proposal (Plaza)Document10 pagesResearch Proposal (Plaza)Edmarjan ConcepcionNo ratings yet
- Obstacle Avoiding RobotDocument17 pagesObstacle Avoiding RobotSmiley Boy Aanand100% (1)
- REPORTDocument22 pagesREPORThohi4808No ratings yet
- Auto-Smart Obstacle DetectionDocument5 pagesAuto-Smart Obstacle DetectionIJSTENo ratings yet
- Internet of Things and MM Jury PDFDocument20 pagesInternet of Things and MM Jury PDFGagan SinghviNo ratings yet
- Project Live Human Detecting RobotDocument19 pagesProject Live Human Detecting Robotjaineetesh1991No ratings yet
- Smart Dustbin Using ArdunioDocument9 pagesSmart Dustbin Using ArdunioIJRASETPublicationsNo ratings yet
- Mini-Project: Aut Omat Ic Door Syst emDocument14 pagesMini-Project: Aut Omat Ic Door Syst emJanwan BagwanNo ratings yet
- Motion Detection System: Intruders Counter System With Signal InformationDocument17 pagesMotion Detection System: Intruders Counter System With Signal InformationAhmed M HasanNo ratings yet
- Iot ReportDocument23 pagesIot Reportshruthika6336No ratings yet
- Arduino Wireless Receiver - Transmitter Design - DocumentDocument11 pagesArduino Wireless Receiver - Transmitter Design - DocumentRaja Sekhar BatchuNo ratings yet
- Four Way Tracking Car TutorialDocument26 pagesFour Way Tracking Car Tutorialvadym_kovalenko4166No ratings yet
- Home Automation ReportDocument52 pagesHome Automation ReportShashank PandeyNo ratings yet
- Intelligent Smart Zone Based Vehicle Speed Control System Using RFDocument5 pagesIntelligent Smart Zone Based Vehicle Speed Control System Using RFSANGAVI SNo ratings yet
- Alive Human Detecting RobotDocument19 pagesAlive Human Detecting Robotjaineetesh1991100% (4)
- Wireless Electrical Appliances Using IR SensorsDocument8 pagesWireless Electrical Appliances Using IR SensorsmadhavNo ratings yet
- GSM Based Garbage Monitoring System: IjarcceDocument4 pagesGSM Based Garbage Monitoring System: IjarcceRoborocks ComputerssNo ratings yet
- Chapters 2 ProjectDocument11 pagesChapters 2 Projectemmanuel.tripalsNo ratings yet
- Modified Radar ReportDocument17 pagesModified Radar ReportAsif KarimNo ratings yet
- Non-Linearities in Passive RFID Systems: Third Harmonic Concept and ApplicationsFrom EverandNon-Linearities in Passive RFID Systems: Third Harmonic Concept and ApplicationsNo ratings yet
- Project PresentationDocument7 pagesProject PresentationAbid SagorNo ratings yet
- Topic Name: Electric Generators: InstructionDocument6 pagesTopic Name: Electric Generators: InstructionAbid SagorNo ratings yet
- Open-Loop Speed Control of A DC Motor: Abidur Rahman Sagor 18-38599-2Document5 pagesOpen-Loop Speed Control of A DC Motor: Abidur Rahman Sagor 18-38599-2Abid SagorNo ratings yet
- Title: Cellular Mobile System DesignDocument20 pagesTitle: Cellular Mobile System DesignAbid SagorNo ratings yet
- Title: Satellite Link Design.: Eirp P GDocument18 pagesTitle: Satellite Link Design.: Eirp P GAbid SagorNo ratings yet
- American International University - Bangladesh (AIUB) Faculty of EngineeringDocument11 pagesAmerican International University - Bangladesh (AIUB) Faculty of EngineeringAbid SagorNo ratings yet
- Performing Mathematical Operation and Performance Analysis in MATLABDocument7 pagesPerforming Mathematical Operation and Performance Analysis in MATLABAbid SagorNo ratings yet
- GSM Global System For Mobile Communications: Telecommunication EngineeringDocument23 pagesGSM Global System For Mobile Communications: Telecommunication EngineeringAbid SagorNo ratings yet
- Telecommunication S Engineering: Cellular Mobile Communications Cellular ConceptsDocument31 pagesTelecommunication S Engineering: Cellular Mobile Communications Cellular ConceptsAbid SagorNo ratings yet
- Propagation Path Loss EstimationDocument12 pagesPropagation Path Loss EstimationAbid SagorNo ratings yet
- Construction Scheme of T-Beam Launching For Permanent BridgeDocument17 pagesConstruction Scheme of T-Beam Launching For Permanent BridgeKAmi KaMranNo ratings yet
- Determination of Chromium VI Concentration Via Absorption Spectroscopy ExperimentDocument12 pagesDetermination of Chromium VI Concentration Via Absorption Spectroscopy ExperimentHani ZahraNo ratings yet
- "134-S" Series: Optional Gasket KitDocument45 pages"134-S" Series: Optional Gasket KitginoNo ratings yet
- Module 4 ResearchDocument9 pagesModule 4 ResearchJegg AsisNo ratings yet
- Anime and MangaDocument14 pagesAnime and Mangapuspo agungNo ratings yet
- Modeling and Analysis of DC-DC Converters Under Pulse Skipping ModulationDocument6 pagesModeling and Analysis of DC-DC Converters Under Pulse Skipping Modulationad duybgNo ratings yet
- Detailed Lesson Plan in MAPE7 ART, Fourth QuarterDocument9 pagesDetailed Lesson Plan in MAPE7 ART, Fourth QuarterLolita Reynolds100% (1)
- Chapter 5 - Elasticity and Its ApplicationDocument37 pagesChapter 5 - Elasticity and Its ApplicationOktaviana MuktiNo ratings yet
- A High-Throughput Method For Dereplication and Assessment Ofmetabolite Distribution Insalviaspecies Using LC-MS/MSDocument12 pagesA High-Throughput Method For Dereplication and Assessment Ofmetabolite Distribution Insalviaspecies Using LC-MS/MSkostNo ratings yet
- Unit-7: Iot SecurityDocument21 pagesUnit-7: Iot SecuritySAMPANo ratings yet
- 93admit Card Semester-V 011 12-01-2022 16-51-1Document37 pages93admit Card Semester-V 011 12-01-2022 16-51-1Spotify premiumNo ratings yet
- 02 Surface Production Material Movement V70Document49 pages02 Surface Production Material Movement V70Jobs Mathan100% (1)
- ICDs and CFSsDocument10 pagesICDs and CFSsDat BoiNo ratings yet
- Huawei HCIA-AI V3.0 Certification ExamDocument3 pagesHuawei HCIA-AI V3.0 Certification ExamAbraham MogosNo ratings yet
- Pan Pearl River Delta Physics Olympiad 2017Document5 pagesPan Pearl River Delta Physics Olympiad 2017DiyaNo ratings yet
- D Dy DT Q K DyDocument20 pagesD Dy DT Q K DyMohammed Al-OdatNo ratings yet
- Presented By: Thermistor - Fan Speed Control Using LabviewDocument16 pagesPresented By: Thermistor - Fan Speed Control Using LabviewKomal ZalwarNo ratings yet
- The History of GymnasticsDocument2 pagesThe History of Gymnasticsblessed cccNo ratings yet
- BB FiberOpticCommandmentsDocument4 pagesBB FiberOpticCommandmentsDand LongNo ratings yet
- UL Listed Class 2 TransformersDocument3 pagesUL Listed Class 2 TransformersHerm HarrisonNo ratings yet
- BNPL and Store CardsDocument13 pagesBNPL and Store CardsTrader CatNo ratings yet
- Garden Seed Handbook Part 31Document5 pagesGarden Seed Handbook Part 31gezarolNo ratings yet
- Albumina 1Document2 pagesAlbumina 1Vale FrancoNo ratings yet
- Calculating The Temperature RiseDocument8 pagesCalculating The Temperature Risesiva anandNo ratings yet
- Identifikasi Miskonsepsi Materi IPA Kelas VII SMP N 1 Gunung Sugih Lampung TengahDocument12 pagesIdentifikasi Miskonsepsi Materi IPA Kelas VII SMP N 1 Gunung Sugih Lampung TengahMawarniwati Waruwu Undiksha 2019No ratings yet
- 01 Lord Krishna-VrindavanDocument304 pages01 Lord Krishna-VrindavanJey AnandNo ratings yet
- Problem Set No. 4 PDFDocument1 pageProblem Set No. 4 PDFKent Lawrence LordanNo ratings yet