
Programmable Logic Array
Programmable Logic Array
You might also like
- Quiz 3Document8 pagesQuiz 3Dhruv Sahni100% (1)
- Programmable Logic ArrayDocument6 pagesProgrammable Logic Arraysrividya0444No ratings yet
- Prom PDFDocument7 pagesProm PDFAamirNo ratings yet
- Unit 13: Chapter 3 - Combinational Logic DesignDocument40 pagesUnit 13: Chapter 3 - Combinational Logic DesignVani YamaniNo ratings yet
- Det10013 & Electrical Technology: DC Equivalent Circuit & Network TheoremDocument87 pagesDet10013 & Electrical Technology: DC Equivalent Circuit & Network TheoremF1090 ALIF IKHWANNo ratings yet
- Network TrainingDocument368 pagesNetwork TrainingCool hunk100% (3)
- Microprocessor 8085 ManualDocument30 pagesMicroprocessor 8085 Manualrajji_kashish100% (3)
- 8085 Instruction Set & Writing Assembly ProgramFileDocument50 pages8085 Instruction Set & Writing Assembly ProgramFileKaseya Takahashi100% (1)
- Module-4-DC To AC Converters - ModDocument65 pagesModule-4-DC To AC Converters - Mod21je0095100% (1)
- L7 - Flip-Flops and Sequential Circuit DesignDocument41 pagesL7 - Flip-Flops and Sequential Circuit DesignSuresh Thallapelli100% (1)
- Slides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDocument7 pagesSlides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDamu HameedNo ratings yet
- Assembly Language ProgrammingDocument14 pagesAssembly Language ProgrammingRushabh Modi100% (1)
- Understanding Profibus vs. ProfinetDocument6 pagesUnderstanding Profibus vs. ProfinetJoe FalchettoNo ratings yet
- Twido HardwareDocument31 pagesTwido Hardwarekhusnul bmjNo ratings yet
- 8085 ProgramsDocument12 pages8085 ProgramsDeepak100% (1)
- Mapping Internet Addresses To Physical Addresses (ARP)Document27 pagesMapping Internet Addresses To Physical Addresses (ARP)Rahul MakwanaNo ratings yet
- 03 Mbed Course Notes - Pulse Width ModulationDocument22 pages03 Mbed Course Notes - Pulse Width Modulationsaul arellanoNo ratings yet
- Mesh and Node AnalysisDocument93 pagesMesh and Node Analysisferiel19No ratings yet
- Chapter 2-2 - Network TopologiesDocument27 pagesChapter 2-2 - Network TopologiesAfendey Athur Jinir100% (1)
- Digital Principle and System Design: Multiplexers and Demultiplexers, and Encoders and DecodersDocument30 pagesDigital Principle and System Design: Multiplexers and Demultiplexers, and Encoders and DecodersswathiNo ratings yet
- 3.quantization and Transmission of AudioDocument10 pages3.quantization and Transmission of AudioNatnel TsehayeNo ratings yet
- Optical Detectors in Fiber Optic ReceiversDocument83 pagesOptical Detectors in Fiber Optic Receiversali ghalibNo ratings yet
- Photo Diodes 2Document20 pagesPhoto Diodes 2Riaz IsraniNo ratings yet
- 8085 Microprocessor ArchitectureDocument46 pages8085 Microprocessor ArchitectureNikhl Mahajan100% (1)
- Alternating Current: Alternating Voltage (Ac Voltage)Document9 pagesAlternating Current: Alternating Voltage (Ac Voltage)Darmesh YadavNo ratings yet
- Unit 2 - Programming of 8085 MicroprocessorDocument32 pagesUnit 2 - Programming of 8085 MicroprocessorSathiyaraj100% (1)
- Microprocessor8085 BestDocument145 pagesMicroprocessor8085 BestDebashis TaraiNo ratings yet
- Class 2-Introduction To 8085 Microprocessor PDFDocument46 pagesClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalNo ratings yet
- 07 Registers and CountersDocument28 pages07 Registers and CountersChandravadhana NarayananNo ratings yet
- Introduction To 8085 Microprocessor - Dr.P.YogeshDocument48 pagesIntroduction To 8085 Microprocessor - Dr.P.Yogeshmailmeasdd100% (1)
- M11 8085 ProgrammingDocument136 pagesM11 8085 ProgrammingPavan Deep100% (2)
- PIT: Programmable Interval Timer: Introduction To 8253/8254Document34 pagesPIT: Programmable Interval Timer: Introduction To 8253/8254Sayan GhoshNo ratings yet
- Networking: PPT Requirement For Students As AprojectDocument22 pagesNetworking: PPT Requirement For Students As Aproject10chirag10100% (1)
- PLC - Sies PDFDocument116 pagesPLC - Sies PDFABHISHEK THAKURNo ratings yet
- Power Electronicsall Five UnitDocument432 pagesPower Electronicsall Five Unitdj9017354100% (1)
- SCADA - Supervisory Control and Data AcquisitionDocument23 pagesSCADA - Supervisory Control and Data AcquisitionSushant KambojNo ratings yet
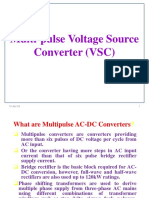
- Multipulse Voltage Source ConverterDocument49 pagesMultipulse Voltage Source ConverterOm prakash100% (1)
- Narrowband and Wideband FMDocument18 pagesNarrowband and Wideband FMIslam CandleNo ratings yet
- DigComm Fall09-Chapter4Document81 pagesDigComm Fall09-Chapter4rachraj100% (1)
- Mux Ra1911004010178Document10 pagesMux Ra1911004010178Shivanshu TripathiNo ratings yet
- CCNA Routing and Switching S3Document16 pagesCCNA Routing and Switching S3FiskoaujNo ratings yet
- Shift Register PDFDocument8 pagesShift Register PDFmahimaNo ratings yet
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression ADocument19 pagesDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya Choudhary100% (1)
- Instruction Set of 8085 Microprocessor By, Er. Swapnil V. KawareDocument107 pagesInstruction Set of 8085 Microprocessor By, Er. Swapnil V. Kawareswapnil100% (1)
- 125 - EC8691 Microprocessors and Microcontrollers - Anna University 2017 Regulation SyllabusDocument2 pages125 - EC8691 Microprocessors and Microcontrollers - Anna University 2017 Regulation SyllabusAjeethNo ratings yet
- Fundamentals of Power Electronics - CompressedDocument341 pagesFundamentals of Power Electronics - Compressedghatiyashivani48No ratings yet
- Programmingwith8085 130826055747 Phpapp01Document55 pagesProgrammingwith8085 130826055747 Phpapp01Malviya Rohit100% (1)
- RF Active DevicesDocument13 pagesRF Active DevicesRaj PatelNo ratings yet
- 8255 (Programmable Peripheral Interface)Document6 pages8255 (Programmable Peripheral Interface)sneha singhNo ratings yet
- Pulse Modulation: Powerpoint Templates Powerpoint TemplatesDocument51 pagesPulse Modulation: Powerpoint Templates Powerpoint TemplatesJoa SeeNo ratings yet
- Introduction To LAN Protocols PDFDocument7 pagesIntroduction To LAN Protocols PDFfayaz_hussain88No ratings yet
- 12 - Operational AmplifiersDocument27 pages12 - Operational Amplifierssgw67No ratings yet
- DLF Microprocessor 02 2017 18Document72 pagesDLF Microprocessor 02 2017 18ARSALAAN HUSSAIN100% (1)
- The OSI Model Session LayerDocument11 pagesThe OSI Model Session LayerIan CarlNo ratings yet
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDocument33 pagesUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNo ratings yet
- 11.3.4.6 Lab - Using The CLI To Gather Network Device InformationDocument11 pages11.3.4.6 Lab - Using The CLI To Gather Network Device InformationRazvan Buicliu20% (5)
- Programmable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Document12 pagesProgrammable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Helena Sullivan100% (1)
- PIC Timer 0 Calculation ExampleDocument3 pagesPIC Timer 0 Calculation Examplef.last100% (1)
- What Are The Differences Between SIMULATION and SYNTHESISDocument12 pagesWhat Are The Differences Between SIMULATION and SYNTHESISiyanduraiNo ratings yet
- Computer - Repair - A Complete Illustrated Guide To PC Hardware - c2004Document639 pagesComputer - Repair - A Complete Illustrated Guide To PC Hardware - c2004Lê AnhNo ratings yet
- W1FB Design NotebookDocument200 pagesW1FB Design NotebookHugh100% (6)
- Cebu City CIVIL STRUCTURAL PERMITfor Building PermitDocument2 pagesCebu City CIVIL STRUCTURAL PERMITfor Building PermitAudrey ChuaNo ratings yet
- BS en 1011-1-2005Document15 pagesBS en 1011-1-2005reezmanNo ratings yet
- Electronics For ArtistsDocument35 pagesElectronics For Artistsdb5fx100% (1)
- Quincy QT Series Model QT-5Document18 pagesQuincy QT Series Model QT-5mkaukolaNo ratings yet
- PC Dmis Basic PDFDocument349 pagesPC Dmis Basic PDFmikadoturk67% (3)
- FT 7000Document61 pagesFT 7000Vilas BoasNo ratings yet
- GSM-04 08Document630 pagesGSM-04 08Shweta RangeshNo ratings yet
- GPCDocument39 pagesGPCRahul ChaudharyNo ratings yet
- Cold-Formed Steel in ConstructionDocument33 pagesCold-Formed Steel in ConstructionVijender JainNo ratings yet
- Eaton Pulsar Series Nova DatasheetDocument2 pagesEaton Pulsar Series Nova DatasheetVladimir StojicevicNo ratings yet
- Fusion Global PE Product Offer V4 Low ResDocument182 pagesFusion Global PE Product Offer V4 Low ResmokbelNo ratings yet
- Introduction To Fluid Mechanics : Fred Stern, Tao Xing, Jun Shao, Surajeet GhoshDocument44 pagesIntroduction To Fluid Mechanics : Fred Stern, Tao Xing, Jun Shao, Surajeet GhoshTrigger DineshNo ratings yet
- Manualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFDocument50 pagesManualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFMOHANNo ratings yet
- OS Lab ManualDocument40 pagesOS Lab Manualtp2006sterNo ratings yet
- Fiber Spinning Quench Air Speed PDFDocument2 pagesFiber Spinning Quench Air Speed PDFMichelleNo ratings yet
- Syed Shams Haider 203 Lab Report 06Document7 pagesSyed Shams Haider 203 Lab Report 06Syed ShamsNo ratings yet
- The Mechanism For The Esterification ReactionDocument5 pagesThe Mechanism For The Esterification Reactionuocmogiandi_aNo ratings yet
- BSNLDocument27 pagesBSNLthreephasefaultNo ratings yet
- Som-I - Ii Mid Subjective Q.BDocument4 pagesSom-I - Ii Mid Subjective Q.BB VAMSI KRISHNANo ratings yet
- Uninstall GGDocument2 pagesUninstall GGVignesh RenganathNo ratings yet
- Keystone CATALOG 2019 REV 09 12-24-19Document109 pagesKeystone CATALOG 2019 REV 09 12-24-19emilianoNo ratings yet
- Headlamp Aiming GuideDocument5 pagesHeadlamp Aiming Guideshu2uNo ratings yet
- Sample of Nfpa Hydraulic CalculationDocument14 pagesSample of Nfpa Hydraulic Calculationzasza100% (1)
- BOQ Name of Work: Repairing False Ceiling at Central Library Building in IITG CampusDocument2 pagesBOQ Name of Work: Repairing False Ceiling at Central Library Building in IITG CampusSherif El-SabbahyNo ratings yet
- Penawaran 0218 Printdate 32S Utk CaressaDocument3 pagesPenawaran 0218 Printdate 32S Utk CaressaRessa AjaNo ratings yet
- 2D Seismic TutorialDocument264 pages2D Seismic Tutorialjose razoNo ratings yet
- Elante MallDocument24 pagesElante MallAr Sandeep Jaiswal33% (3)
- Self Compacting Concrete Offers Design PotentialDocument4 pagesSelf Compacting Concrete Offers Design Potentialssi3kNo ratings yet
- Carrier FcuDocument44 pagesCarrier Fcuchenzo24No ratings yet
























































































Download as docx, pdf, or txt
You might also like
- Quiz 3Document8 pagesQuiz 3Dhruv Sahni100% (1)
- Programmable Logic ArrayDocument6 pagesProgrammable Logic Arraysrividya0444No ratings yet
- Prom PDFDocument7 pagesProm PDFAamirNo ratings yet
- Unit 13: Chapter 3 - Combinational Logic DesignDocument40 pagesUnit 13: Chapter 3 - Combinational Logic DesignVani YamaniNo ratings yet
- Det10013 & Electrical Technology: DC Equivalent Circuit & Network TheoremDocument87 pagesDet10013 & Electrical Technology: DC Equivalent Circuit & Network TheoremF1090 ALIF IKHWANNo ratings yet
- Network TrainingDocument368 pagesNetwork TrainingCool hunk100% (3)
- Microprocessor 8085 ManualDocument30 pagesMicroprocessor 8085 Manualrajji_kashish100% (3)
- 8085 Instruction Set & Writing Assembly ProgramFileDocument50 pages8085 Instruction Set & Writing Assembly ProgramFileKaseya Takahashi100% (1)
- Module-4-DC To AC Converters - ModDocument65 pagesModule-4-DC To AC Converters - Mod21je0095100% (1)
- L7 - Flip-Flops and Sequential Circuit DesignDocument41 pagesL7 - Flip-Flops and Sequential Circuit DesignSuresh Thallapelli100% (1)
- Slides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDocument7 pagesSlides From TCP/IP - Forouzan: - Process-to-Process Communication - User Datagram - Checksum - Use of UDP - UDP DesignDamu HameedNo ratings yet
- Assembly Language ProgrammingDocument14 pagesAssembly Language ProgrammingRushabh Modi100% (1)
- Understanding Profibus vs. ProfinetDocument6 pagesUnderstanding Profibus vs. ProfinetJoe FalchettoNo ratings yet
- Twido HardwareDocument31 pagesTwido Hardwarekhusnul bmjNo ratings yet
- 8085 ProgramsDocument12 pages8085 ProgramsDeepak100% (1)
- Mapping Internet Addresses To Physical Addresses (ARP)Document27 pagesMapping Internet Addresses To Physical Addresses (ARP)Rahul MakwanaNo ratings yet
- 03 Mbed Course Notes - Pulse Width ModulationDocument22 pages03 Mbed Course Notes - Pulse Width Modulationsaul arellanoNo ratings yet
- Mesh and Node AnalysisDocument93 pagesMesh and Node Analysisferiel19No ratings yet
- Chapter 2-2 - Network TopologiesDocument27 pagesChapter 2-2 - Network TopologiesAfendey Athur Jinir100% (1)
- Digital Principle and System Design: Multiplexers and Demultiplexers, and Encoders and DecodersDocument30 pagesDigital Principle and System Design: Multiplexers and Demultiplexers, and Encoders and DecodersswathiNo ratings yet
- 3.quantization and Transmission of AudioDocument10 pages3.quantization and Transmission of AudioNatnel TsehayeNo ratings yet
- Optical Detectors in Fiber Optic ReceiversDocument83 pagesOptical Detectors in Fiber Optic Receiversali ghalibNo ratings yet
- Photo Diodes 2Document20 pagesPhoto Diodes 2Riaz IsraniNo ratings yet
- 8085 Microprocessor ArchitectureDocument46 pages8085 Microprocessor ArchitectureNikhl Mahajan100% (1)
- Alternating Current: Alternating Voltage (Ac Voltage)Document9 pagesAlternating Current: Alternating Voltage (Ac Voltage)Darmesh YadavNo ratings yet
- Unit 2 - Programming of 8085 MicroprocessorDocument32 pagesUnit 2 - Programming of 8085 MicroprocessorSathiyaraj100% (1)
- Microprocessor8085 BestDocument145 pagesMicroprocessor8085 BestDebashis TaraiNo ratings yet
- Class 2-Introduction To 8085 Microprocessor PDFDocument46 pagesClass 2-Introduction To 8085 Microprocessor PDFDeepika AgrawalNo ratings yet
- 07 Registers and CountersDocument28 pages07 Registers and CountersChandravadhana NarayananNo ratings yet
- Introduction To 8085 Microprocessor - Dr.P.YogeshDocument48 pagesIntroduction To 8085 Microprocessor - Dr.P.Yogeshmailmeasdd100% (1)
- M11 8085 ProgrammingDocument136 pagesM11 8085 ProgrammingPavan Deep100% (2)
- PIT: Programmable Interval Timer: Introduction To 8253/8254Document34 pagesPIT: Programmable Interval Timer: Introduction To 8253/8254Sayan GhoshNo ratings yet
- Networking: PPT Requirement For Students As AprojectDocument22 pagesNetworking: PPT Requirement For Students As Aproject10chirag10100% (1)
- PLC - Sies PDFDocument116 pagesPLC - Sies PDFABHISHEK THAKURNo ratings yet
- Power Electronicsall Five UnitDocument432 pagesPower Electronicsall Five Unitdj9017354100% (1)
- SCADA - Supervisory Control and Data AcquisitionDocument23 pagesSCADA - Supervisory Control and Data AcquisitionSushant KambojNo ratings yet
- Multipulse Voltage Source ConverterDocument49 pagesMultipulse Voltage Source ConverterOm prakash100% (1)
- Narrowband and Wideband FMDocument18 pagesNarrowband and Wideband FMIslam CandleNo ratings yet
- DigComm Fall09-Chapter4Document81 pagesDigComm Fall09-Chapter4rachraj100% (1)
- Mux Ra1911004010178Document10 pagesMux Ra1911004010178Shivanshu TripathiNo ratings yet
- CCNA Routing and Switching S3Document16 pagesCCNA Routing and Switching S3FiskoaujNo ratings yet
- Shift Register PDFDocument8 pagesShift Register PDFmahimaNo ratings yet
- Digital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression ADocument19 pagesDigital Logic Basics: 2-1 Implementation Using NAND Gates: We Can Write The XOR Logical Expression AKavya Choudhary100% (1)
- Instruction Set of 8085 Microprocessor By, Er. Swapnil V. KawareDocument107 pagesInstruction Set of 8085 Microprocessor By, Er. Swapnil V. Kawareswapnil100% (1)
- 125 - EC8691 Microprocessors and Microcontrollers - Anna University 2017 Regulation SyllabusDocument2 pages125 - EC8691 Microprocessors and Microcontrollers - Anna University 2017 Regulation SyllabusAjeethNo ratings yet
- Fundamentals of Power Electronics - CompressedDocument341 pagesFundamentals of Power Electronics - Compressedghatiyashivani48No ratings yet
- Programmingwith8085 130826055747 Phpapp01Document55 pagesProgrammingwith8085 130826055747 Phpapp01Malviya Rohit100% (1)
- RF Active DevicesDocument13 pagesRF Active DevicesRaj PatelNo ratings yet
- 8255 (Programmable Peripheral Interface)Document6 pages8255 (Programmable Peripheral Interface)sneha singhNo ratings yet
- Pulse Modulation: Powerpoint Templates Powerpoint TemplatesDocument51 pagesPulse Modulation: Powerpoint Templates Powerpoint TemplatesJoa SeeNo ratings yet
- Introduction To LAN Protocols PDFDocument7 pagesIntroduction To LAN Protocols PDFfayaz_hussain88No ratings yet
- 12 - Operational AmplifiersDocument27 pages12 - Operational Amplifierssgw67No ratings yet
- DLF Microprocessor 02 2017 18Document72 pagesDLF Microprocessor 02 2017 18ARSALAAN HUSSAIN100% (1)
- The OSI Model Session LayerDocument11 pagesThe OSI Model Session LayerIan CarlNo ratings yet
- Unit 5 - A CASE STUDY - Using Pic MicrocontrollerDocument33 pagesUnit 5 - A CASE STUDY - Using Pic MicrocontrollerPoonthalirNo ratings yet
- 11.3.4.6 Lab - Using The CLI To Gather Network Device InformationDocument11 pages11.3.4.6 Lab - Using The CLI To Gather Network Device InformationRazvan Buicliu20% (5)
- Programmable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Document12 pagesProgrammable Logic Controllers (PLC') : Helena Sullivan PLTW Cim-Cti 2015Helena Sullivan100% (1)
- PIC Timer 0 Calculation ExampleDocument3 pagesPIC Timer 0 Calculation Examplef.last100% (1)
- What Are The Differences Between SIMULATION and SYNTHESISDocument12 pagesWhat Are The Differences Between SIMULATION and SYNTHESISiyanduraiNo ratings yet
- Computer - Repair - A Complete Illustrated Guide To PC Hardware - c2004Document639 pagesComputer - Repair - A Complete Illustrated Guide To PC Hardware - c2004Lê AnhNo ratings yet
- W1FB Design NotebookDocument200 pagesW1FB Design NotebookHugh100% (6)
- Cebu City CIVIL STRUCTURAL PERMITfor Building PermitDocument2 pagesCebu City CIVIL STRUCTURAL PERMITfor Building PermitAudrey ChuaNo ratings yet
- BS en 1011-1-2005Document15 pagesBS en 1011-1-2005reezmanNo ratings yet
- Electronics For ArtistsDocument35 pagesElectronics For Artistsdb5fx100% (1)
- Quincy QT Series Model QT-5Document18 pagesQuincy QT Series Model QT-5mkaukolaNo ratings yet
- PC Dmis Basic PDFDocument349 pagesPC Dmis Basic PDFmikadoturk67% (3)
- FT 7000Document61 pagesFT 7000Vilas BoasNo ratings yet
- GSM-04 08Document630 pagesGSM-04 08Shweta RangeshNo ratings yet
- GPCDocument39 pagesGPCRahul ChaudharyNo ratings yet
- Cold-Formed Steel in ConstructionDocument33 pagesCold-Formed Steel in ConstructionVijender JainNo ratings yet
- Eaton Pulsar Series Nova DatasheetDocument2 pagesEaton Pulsar Series Nova DatasheetVladimir StojicevicNo ratings yet
- Fusion Global PE Product Offer V4 Low ResDocument182 pagesFusion Global PE Product Offer V4 Low ResmokbelNo ratings yet
- Introduction To Fluid Mechanics : Fred Stern, Tao Xing, Jun Shao, Surajeet GhoshDocument44 pagesIntroduction To Fluid Mechanics : Fred Stern, Tao Xing, Jun Shao, Surajeet GhoshTrigger DineshNo ratings yet
- Manualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFDocument50 pagesManualsolutionsformachinedesignbykhurmiandgupta 121124075743 Phpapp01 PDFMOHANNo ratings yet
- OS Lab ManualDocument40 pagesOS Lab Manualtp2006sterNo ratings yet
- Fiber Spinning Quench Air Speed PDFDocument2 pagesFiber Spinning Quench Air Speed PDFMichelleNo ratings yet
- Syed Shams Haider 203 Lab Report 06Document7 pagesSyed Shams Haider 203 Lab Report 06Syed ShamsNo ratings yet
- The Mechanism For The Esterification ReactionDocument5 pagesThe Mechanism For The Esterification Reactionuocmogiandi_aNo ratings yet
- BSNLDocument27 pagesBSNLthreephasefaultNo ratings yet
- Som-I - Ii Mid Subjective Q.BDocument4 pagesSom-I - Ii Mid Subjective Q.BB VAMSI KRISHNANo ratings yet
- Uninstall GGDocument2 pagesUninstall GGVignesh RenganathNo ratings yet
- Keystone CATALOG 2019 REV 09 12-24-19Document109 pagesKeystone CATALOG 2019 REV 09 12-24-19emilianoNo ratings yet
- Headlamp Aiming GuideDocument5 pagesHeadlamp Aiming Guideshu2uNo ratings yet
- Sample of Nfpa Hydraulic CalculationDocument14 pagesSample of Nfpa Hydraulic Calculationzasza100% (1)
- BOQ Name of Work: Repairing False Ceiling at Central Library Building in IITG CampusDocument2 pagesBOQ Name of Work: Repairing False Ceiling at Central Library Building in IITG CampusSherif El-SabbahyNo ratings yet
- Penawaran 0218 Printdate 32S Utk CaressaDocument3 pagesPenawaran 0218 Printdate 32S Utk CaressaRessa AjaNo ratings yet
- 2D Seismic TutorialDocument264 pages2D Seismic Tutorialjose razoNo ratings yet
- Elante MallDocument24 pagesElante MallAr Sandeep Jaiswal33% (3)
- Self Compacting Concrete Offers Design PotentialDocument4 pagesSelf Compacting Concrete Offers Design Potentialssi3kNo ratings yet
- Carrier FcuDocument44 pagesCarrier Fcuchenzo24No ratings yet