Download as pdf or txt
You might also like
- Ch.24.1 Intro To AnimalsDocument20 pagesCh.24.1 Intro To AnimalsweldeenytNo ratings yet
- BISC 303 Unknown ReportDocument10 pagesBISC 303 Unknown ReportAnonymous UQF3TC0No ratings yet
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0From EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Rating: 5 out of 5 stars5/5 (1)
- CMS FM Form 1Document9 pagesCMS FM Form 1Ali HamzaNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- NCS-DM Type 2 For Case PresentationDocument49 pagesNCS-DM Type 2 For Case Presentationadnelg0771% (7)
- CNC LAB Manual PDFDocument33 pagesCNC LAB Manual PDFrajee10133% (3)
- Disorders of Growth, Differentiation and Morphogenesis EditDocument48 pagesDisorders of Growth, Differentiation and Morphogenesis EditRizka Desti AyuniNo ratings yet
- Tool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesDocument7 pagesTool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesseventhsensegroupNo ratings yet
- CNC Programming Systems PDFDocument22 pagesCNC Programming Systems PDFSurendra SainiNo ratings yet
- Nterpolation Ethods: Linear InterpolationDocument16 pagesNterpolation Ethods: Linear InterpolationMohammad UmairNo ratings yet
- 254464.1 Car Mikac VezaDocument6 pages254464.1 Car Mikac VezaengrodeNo ratings yet
- Computer-Aided CNC Programming For The Machining of Non-Typical PartsDocument16 pagesComputer-Aided CNC Programming For The Machining of Non-Typical PartsPham LongNo ratings yet
- Synopsis Of: Standard Format For Preparing The SynopsisDocument30 pagesSynopsis Of: Standard Format For Preparing The SynopsisMusadiq MalikNo ratings yet
- Computer Aided Process Planning Technique in Casting Industries An Overview IJERTV2IS2166Document5 pagesComputer Aided Process Planning Technique in Casting Industries An Overview IJERTV2IS2166CPT MechNo ratings yet
- Implementation of Web-Based NC Postprocessor Builder: Gab-Sang RyuDocument9 pagesImplementation of Web-Based NC Postprocessor Builder: Gab-Sang Ryualisal_teaNo ratings yet
- Cidm NotesDocument23 pagesCidm NotesPrajwal Jaiswal100% (1)
- Automatic Automatic Generating CNC-Code For Milling MachineGenerating CNC Code For Milling MachineDocument7 pagesAutomatic Automatic Generating CNC-Code For Milling MachineGenerating CNC Code For Milling MachineVikas Singh SisodiaNo ratings yet
- Intelligent Optimal Tool Selections For CNC Programming of Machine ToolsDocument10 pagesIntelligent Optimal Tool Selections For CNC Programming of Machine ToolsAgus GunawanNo ratings yet
- Implementation of CAD/CAM System CATIA V5 in Simulation of CNC Machining ProcessDocument8 pagesImplementation of CAD/CAM System CATIA V5 in Simulation of CNC Machining ProcessRay SaNo ratings yet
- Computer Aided ManufacturingDocument28 pagesComputer Aided ManufacturingSheik AbdullahNo ratings yet
- Ijet 29682 1 1Document7 pagesIjet 29682 1 1margiyanto108No ratings yet
- CNC Program and Programming of CNC MachiDocument5 pagesCNC Program and Programming of CNC Machicjjeus9No ratings yet
- Cad Pace 2 57-68Document12 pagesCad Pace 2 57-68Kazimir KozulNo ratings yet
- TinyG Report - FinalDocument44 pagesTinyG Report - Finalbokic88No ratings yet
- Tool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesDocument8 pagesTool Path Optimization of Contouring Operation and Machining Strategies For Turbo Machinery BladesODEH ABU YAHIANo ratings yet
- Me704 Cim (Cad)Document25 pagesMe704 Cim (Cad)ASHU KNo ratings yet
- Striving For CAMDocument9 pagesStriving For CAMbshahidhNo ratings yet
- Materials Today: Proceedings: Suthep Butdee, Siridech KunhirunbawonDocument6 pagesMaterials Today: Proceedings: Suthep Butdee, Siridech KunhirunbawonDániel TokodyNo ratings yet
- Protótipo de Uma Máquina CNC de Baixo Custo - Gabriel BatistaDocument12 pagesProtótipo de Uma Máquina CNC de Baixo Custo - Gabriel BatistaGabriel BatistaNo ratings yet
- CNC Machine Programming CourseDocument33 pagesCNC Machine Programming CourseHemant MeenaNo ratings yet
- IJRPR937Document8 pagesIJRPR937Prenank ChandrolNo ratings yet
- 1 1 8 889 PDFDocument7 pages1 1 8 889 PDFAayush BhattaraiNo ratings yet
- Recent Trends in CappDocument23 pagesRecent Trends in CappharimankadaNo ratings yet
- Post ProcessingDocument12 pagesPost Processingsukhbir24No ratings yet
- Computer Aided Progressive Die DesignDocument2 pagesComputer Aided Progressive Die DesignDeep AhireNo ratings yet
- Admin, VorisekDocument5 pagesAdmin, VorisekHari MerdicNo ratings yet
- CADCAM QB AnswersDocument21 pagesCADCAM QB AnswersbhargavganeshkarriNo ratings yet
- Solidcam Imachining (2D) : A Simulation Study of A Spur Gear Machining and G-Code Generation For CNC MachineDocument9 pagesSolidcam Imachining (2D) : A Simulation Study of A Spur Gear Machining and G-Code Generation For CNC MachineTamanna KamalNo ratings yet
- CNC Lab Manual 2023 Med 3102Document66 pagesCNC Lab Manual 2023 Med 3102G. RajeshNo ratings yet
- Design and Implementation of 3 Axis CNC Milling MachineDocument7 pagesDesign and Implementation of 3 Axis CNC Milling Machineအောင် ချစ်သူNo ratings yet
- Assignment-1 Computer Aided Manufacturing ME-418Document21 pagesAssignment-1 Computer Aided Manufacturing ME-418Prateek Kharbanda 79No ratings yet
- ID None PDFDocument13 pagesID None PDFIvanNo ratings yet
- Optimasi Parameter Permesinan Terhadap Waktu Proses Pada Pemrograman CNC Milling Dengan Berbasis Cad/CamDocument13 pagesOptimasi Parameter Permesinan Terhadap Waktu Proses Pada Pemrograman CNC Milling Dengan Berbasis Cad/CamElsa SafiraNo ratings yet
- A Mechatronics Approach To Design A General CNC Controller: September 2015Document7 pagesA Mechatronics Approach To Design A General CNC Controller: September 2015Tony K PaulNo ratings yet
- New DOCX DocumentDocument39 pagesNew DOCX DocumentPavaniNo ratings yet
- ART 24 Analysis of The Possibility of Introducing The ReductionDocument11 pagesART 24 Analysis of The Possibility of Introducing The ReductionBrenda Cecilia Bozzeta GarcíaNo ratings yet
- Development of Canned Cycle For CNC Milling Machine: AbstractDocument9 pagesDevelopment of Canned Cycle For CNC Milling Machine: AbstractandreNo ratings yet
- Group Technology and Its Relation With CIM: Atpms '92Document7 pagesGroup Technology and Its Relation With CIM: Atpms '92Hassan SalviNo ratings yet
- A Genetic Algorithm For Scheduling FlexibleDocument20 pagesA Genetic Algorithm For Scheduling FlexibleNikkhil RathnakarNo ratings yet
- Machining of Steam Turbine Blade On 5-Axis CNC Machine: SciencedirectDocument7 pagesMachining of Steam Turbine Blade On 5-Axis CNC Machine: SciencedirectMido MoussaNo ratings yet
- CNC Facts (Summary of CNC Machining Notes) : EML2322L - Design & Manufacturing LaboratoryDocument2 pagesCNC Facts (Summary of CNC Machining Notes) : EML2322L - Design & Manufacturing LaboratoryAjay Kumar AgarwalNo ratings yet
- Practical No1Document8 pagesPractical No1Dept. Of Mechanical Engg.No ratings yet
- IJEDR1703147Document8 pagesIJEDR1703147Naga NitheshNo ratings yet
- 808 CDocument7 pages808 CDimasNo ratings yet
- Cam For SupraDocument4 pagesCam For SupraKush ThakkarNo ratings yet
- Adriatic Paper FPL-2004Document5 pagesAdriatic Paper FPL-2004prathap13No ratings yet
- AKINDocument15 pagesAKINAjilosun Media AgapeNo ratings yet
- Introduction To RPDDocument6 pagesIntroduction To RPDAmeya BandekarNo ratings yet
- Experiment No. 1: AIM: To Study About CAD, CAM and CAE Software and Its AdvantagesDocument8 pagesExperiment No. 1: AIM: To Study About CAD, CAM and CAE Software and Its AdvantagessuryavigneNo ratings yet
- Creating A Multi-Axis Machining Postprocessor: Petr Vavru SkaDocument5 pagesCreating A Multi-Axis Machining Postprocessor: Petr Vavru Skabayu ajiNo ratings yet
- Enhanced TDocument7 pagesEnhanced Tmanojanandan28No ratings yet
- CNC Machine Controller Using STEP-NCDocument6 pagesCNC Machine Controller Using STEP-NCLuis Enrique CorzoNo ratings yet
- Unit 4 57 PDFDocument20 pagesUnit 4 57 PDFVimal ZizouNo ratings yet
- The Andromedan Compendium - 7bDocument10 pagesThe Andromedan Compendium - 7bAnonymous XSNBQQ4yNo ratings yet
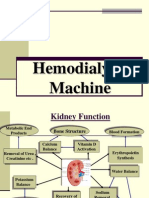
- Hemodialysis Machine12Document45 pagesHemodialysis Machine12Divya SoundarajanNo ratings yet
- Hyderabad Based Pharma Companies Updated10Document1 pageHyderabad Based Pharma Companies Updated10finvistaNo ratings yet
- Laboratory Report BiochemistryDocument3 pagesLaboratory Report BiochemistryMarie Ann Diane EmanoNo ratings yet
- Poner en Práctica: Ejercicio 1. Completa Las Oraciones Con oDocument2 pagesPoner en Práctica: Ejercicio 1. Completa Las Oraciones Con oDIEGONo ratings yet
- Bioenergetics Photosynthesis and Energy FlowDocument4 pagesBioenergetics Photosynthesis and Energy Flowvin ocangNo ratings yet
- Skeletal System Lab ReportDocument5 pagesSkeletal System Lab Reportapi-296589906No ratings yet
- ĐỀ TỰ LUYỆN SỐ 2 KEYDocument9 pagesĐỀ TỰ LUYỆN SỐ 2 KEYYinnieNo ratings yet
- Risk Management in Sterile EnvironmentsDocument30 pagesRisk Management in Sterile EnvironmentsTim Sandle100% (4)
- Human Blood GroupsDocument12 pagesHuman Blood GroupsAme Roxan AwidNo ratings yet
- Barouskaya, I. Anthropocentrism and Ecocentrism Finding Balance For Environmental Protection PurposesDocument19 pagesBarouskaya, I. Anthropocentrism and Ecocentrism Finding Balance For Environmental Protection PurposesEba EbaNo ratings yet
- Solomon Cb09 PPT 02Document32 pagesSolomon Cb09 PPT 02garimadhamija02No ratings yet
- Tomberlin Et Al 2017Document18 pagesTomberlin Et Al 2017Jose Alejandro Hernandez BenitezNo ratings yet
- Monitoreo BiosferaDocument37 pagesMonitoreo BiosferaHéctor W Moreno QNo ratings yet
- CNS MCQSDocument24 pagesCNS MCQSSTEVEN OKURUT100% (2)
- 2 WAY TOS Science 1st QuarterDocument1 page2 WAY TOS Science 1st QuarterApril Rose AlfornonNo ratings yet
- Link For Entrance Test Syllabus: Name of Department Course Name LinkDocument10 pagesLink For Entrance Test Syllabus: Name of Department Course Name LinkUmangNo ratings yet
- Chapter 1 - The Nervous SystemDocument8 pagesChapter 1 - The Nervous SystemRadha RamineniNo ratings yet
- Effectiveness of Guava 1Document16 pagesEffectiveness of Guava 1Arellano Reyson100% (1)
- Psychology Core Concepts 7th Edition Zimbardo Test BankDocument78 pagesPsychology Core Concepts 7th Edition Zimbardo Test Banketiolatepuff33tj100% (31)
- Anti Haemostatic MechanismDocument29 pagesAnti Haemostatic MechanismDorin PathakNo ratings yet
- Bioorganic & Medicinal Chemistry: Christoph Nitsche, Christian Steuer, Christian D. KleinDocument20 pagesBioorganic & Medicinal Chemistry: Christoph Nitsche, Christian Steuer, Christian D. KleinCiro LiraNo ratings yet
- Ra 7586 - Nipas ActDocument10 pagesRa 7586 - Nipas ActggbadayosNo ratings yet
- Megaloblastic Anaemia: Folic Acid and Vitamin B12 MetabolismDocument9 pagesMegaloblastic Anaemia: Folic Acid and Vitamin B12 MetabolismLuna100% (1)
- COVID-19 ANTIGEN SKYTEST BrochureDocument1 pageCOVID-19 ANTIGEN SKYTEST BrochurerianNo ratings yet