Download as pdf or txt
You might also like
- Introduction To TeradataDocument51 pagesIntroduction To Teradataraghavendra.nieNo ratings yet
- GE DIANE Internet Fire WallDocument46 pagesGE DIANE Internet Fire WallSerg Marushko100% (1)
- (Prof. S.S.Sarkate) : " Round Robin Algorithm "Document18 pages(Prof. S.S.Sarkate) : " Round Robin Algorithm "Devendra Thawari100% (1)
- Laboratory Exercise: Objective/sDocument8 pagesLaboratory Exercise: Objective/sTyler Dylan Sarion PinedaNo ratings yet
- ROS Course Slides Course 1Document41 pagesROS Course Slides Course 1Antun JakopecNo ratings yet
- Ros in 5 DaysDocument13 pagesRos in 5 DaysHusam Abu ZourNo ratings yet
- ROS Course Slides Course 2Document28 pagesROS Course Slides Course 2jaffa123456789No ratings yet
- Lab Manual: (3360703) Semester - 6Document65 pagesLab Manual: (3360703) Semester - 6five miner5No ratings yet
- ROS Course Slides Course 1Document34 pagesROS Course Slides Course 1kartavya jainNo ratings yet
- ROS Course Slides Course 1Document34 pagesROS Course Slides Course 1Vikas LakhmaniNo ratings yet
- Laboratory Exercise: Objective/sDocument4 pagesLaboratory Exercise: Objective/sTyler Dylan Sarion PinedaNo ratings yet
- Dlms Server Ocl User ManualDocument26 pagesDlms Server Ocl User ManualManoj kumarNo ratings yet
- Reg. No.: Name:: Q.No. Question Description MarksDocument1 pageReg. No.: Name:: Q.No. Question Description MarksShreyalNo ratings yet
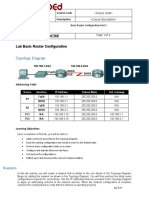
- Topology Diagram: Laboratory ExerciseDocument3 pagesTopology Diagram: Laboratory ExerciseTyler Dylan Sarion PinedaNo ratings yet
- Industrial Training RPRT FormatDocument12 pagesIndustrial Training RPRT Formatbhavika jainNo ratings yet
- Interview Q&A LotusDocument14 pagesInterview Q&A LotusSaravana Kumar100% (1)
- Week003 LaboratoryExercise002 NetworkModelsDocument4 pagesWeek003 LaboratoryExercise002 NetworkModelsPUBG PHNo ratings yet
- PW4 Dej40043 (Puteri, Adha)Document10 pagesPW4 Dej40043 (Puteri, Adha)Puteriey ZfryyNo ratings yet
- III-i Cse ST Coursematerial Unit-3Document29 pagesIII-i Cse ST Coursematerial Unit-3jessiNo ratings yet
- EE50237 - Robotics Software 4aDocument13 pagesEE50237 - Robotics Software 4askylar.skyauNo ratings yet
- System Software and Microprocessor LabmanualDocument130 pagesSystem Software and Microprocessor LabmanualananthuclashNo ratings yet
- BCA 604 Serevr Side Scripting Using PHPDocument2 pagesBCA 604 Serevr Side Scripting Using PHPAzim KhanNo ratings yet
- Capital University of Science and Technology, Islamabad Department of Computer Science, Faculty of ComputingDocument15 pagesCapital University of Science and Technology, Islamabad Department of Computer Science, Faculty of ComputingIdrees KhanNo ratings yet
- Mca LP - 060060207Document8 pagesMca LP - 060060207Omprakash ChandrakarNo ratings yet
- Assignment 2 HT2018Document3 pagesAssignment 2 HT2018buddhi1231443No ratings yet
- Chapter 5 - Scheduling ManagementDocument70 pagesChapter 5 - Scheduling Managementhani adliNo ratings yet
- Industrial Training RPRT FormatDocument12 pagesIndustrial Training RPRT FormatNAMAN JindalNo ratings yet
- Lab Manual For Computer Science I: Terence Soule January 11, 2008Document41 pagesLab Manual For Computer Science I: Terence Soule January 11, 2008Ramesh GNo ratings yet
- 1151ec117 - Eosdd - Unit2 - Question - Bank PDFDocument26 pages1151ec117 - Eosdd - Unit2 - Question - Bank PDFLordwin CecilNo ratings yet
- Experiment Title. 3.1: To Demonstrate The Concept of Tensorflow and KerasDocument4 pagesExperiment Title. 3.1: To Demonstrate The Concept of Tensorflow and KerasShubham SahNo ratings yet
- Syllabus IAM302 - FA17Document11 pagesSyllabus IAM302 - FA17Nguyen Ngoc Bao Long (K15 HCM)No ratings yet
- AIP 10 AbhishekDocument2 pagesAIP 10 AbhishekAkash KumarNo ratings yet
- JMeter Documentation ?Document32 pagesJMeter Documentation ?Anu SelvarajNo ratings yet
- Functional Requirements QuestionnaireDocument11 pagesFunctional Requirements QuestionnaireGuttula ChaitanyaNo ratings yet
- JMeter Training Lab - Intructor GuideDocument34 pagesJMeter Training Lab - Intructor GuideFehmi DenguirNo ratings yet
- COS 0642 Lab Works Jan 2024Document17 pagesCOS 0642 Lab Works Jan 2024zaimdigimaxNo ratings yet
- AIP 10 AkshayDocument2 pagesAIP 10 AkshayAkash KumarNo ratings yet
- PRG10. Multi Threading in T24 - R10.02Document32 pagesPRG10. Multi Threading in T24 - R10.02beimnet100% (1)
- NP Lab Manual v10 MMDocument79 pagesNP Lab Manual v10 MMRajatNo ratings yet
- Lab 3 PHP Introduction and Forms Handling 18052023 095029amDocument14 pagesLab 3 PHP Introduction and Forms Handling 18052023 095029amDayan FarooqNo ratings yet
- Python - Basic - 2 - Jupyter Notebook (Student)Document34 pagesPython - Basic - 2 - Jupyter Notebook (Student)Mesbahur RahmanNo ratings yet
- WIT-Course Material-Unit-3Document82 pagesWIT-Course Material-Unit-3PraneethNo ratings yet
- Lab2 Unit Test Case RRS Group 5Document10 pagesLab2 Unit Test Case RRS Group 5Thanh TùngNo ratings yet
- The Three Main Pillars of Siebel ArchitecutreDocument10 pagesThe Three Main Pillars of Siebel Architecutresanjay kumar Goud100% (2)
- Lecture 1Document33 pagesLecture 1pers0% (1)
- NDR Chart of Codes and Its Description - MessagingTalkDocument5 pagesNDR Chart of Codes and Its Description - MessagingTalkFranc JozefNo ratings yet
- OS A191 - Assign 2 QuestionDocument11 pagesOS A191 - Assign 2 QuestionHooiSzeHeeNo ratings yet
- IT 241 Assignment-1Document5 pagesIT 241 Assignment-1TAHER AL-NEMERNo ratings yet
- LAB 03 1 28102021 065806pmDocument2 pagesLAB 03 1 28102021 065806pmHasaan AfzalNo ratings yet
- Lec 9 Pert and CPMDocument29 pagesLec 9 Pert and CPMABCD EFGHNo ratings yet
- SRS Template + Cover PageDocument8 pagesSRS Template + Cover Page26nkn4xh96No ratings yet
- Project Report MyDocument18 pagesProject Report My60 / Umakanta PradhanNo ratings yet
- ROS-I Basic Developers Training - Session 2 PDFDocument45 pagesROS-I Basic Developers Training - Session 2 PDFblahNo ratings yet
- 36 Discovering ServicesDocument4 pages36 Discovering ServicesAjay SinghNo ratings yet
- A270134180 - 28925 - 3 - 2023 - CA3 CSE316 Simulationbased K22ZW G1Document11 pagesA270134180 - 28925 - 3 - 2023 - CA3 CSE316 Simulationbased K22ZW G1manikanta.reddy329No ratings yet
- Practical Paper FInal Term MOS-I - Revised2Document3 pagesPractical Paper FInal Term MOS-I - Revised2Engr Haseena JabbarNo ratings yet
- Lovely Professional University, Punjab: Format For Instruction Plan (For Courses With Lectures, Tutorials and Labs)Document10 pagesLovely Professional University, Punjab: Format For Instruction Plan (For Courses With Lectures, Tutorials and Labs)vasu007No ratings yet
- Software Test Plan Template 2013Document10 pagesSoftware Test Plan Template 2013Salma EyadiNo ratings yet
- CO Project 2024 v8Document12 pagesCO Project 2024 v8pes 2018 GameNo ratings yet
- Jawaharlal Nehru Engineering College: Laboratory ManualDocument26 pagesJawaharlal Nehru Engineering College: Laboratory ManualMalathi SankarNo ratings yet
- Rxjs 5 UltimateDocument81 pagesRxjs 5 UltimateDinagaran AsNo ratings yet
- Verification of Systems and Circuits Using LOTOS, Petri Nets, and CCSFrom EverandVerification of Systems and Circuits Using LOTOS, Petri Nets, and CCSNo ratings yet
- WarsawDataset PPRAI2024Document5 pagesWarsawDataset PPRAI2024Antun JakopecNo ratings yet
- ROS Course Slides Course 1Document41 pagesROS Course Slides Course 1Antun JakopecNo ratings yet
- Letter: Machine-Learning-Assisted Materials Discovery Using Failed ExperimentsDocument5 pagesLetter: Machine-Learning-Assisted Materials Discovery Using Failed ExperimentsAntun JakopecNo ratings yet
- 8-Band Image Data Processing of The Worldview-2 Satellite in A Wide Area of ApplicationsDocument18 pages8-Band Image Data Processing of The Worldview-2 Satellite in A Wide Area of ApplicationsAntun JakopecNo ratings yet
- AscaasccasDocument1 pageAscaasccasAntun JakopecNo ratings yet
- Knjiga 1Document5 pagesKnjiga 1Antun JakopecNo ratings yet
- HK Ds7732ni E4Document2 pagesHK Ds7732ni E4Jhairzito RMNo ratings yet
- SMPS Reference ManualDocument73 pagesSMPS Reference ManualHardware Hbeonlabs100% (1)
- Comp4010 Lecture4 AR Tracking and InteractionDocument123 pagesComp4010 Lecture4 AR Tracking and InteractionYujie WangNo ratings yet
- Beyond The 12-Factor App PivotalDocument72 pagesBeyond The 12-Factor App Pivotal백예균No ratings yet
- Description Features: LT1129/LT1129-3.3/LT1129-5 Micropower Low Dropout Regulators With ShutdownDocument16 pagesDescription Features: LT1129/LT1129-3.3/LT1129-5 Micropower Low Dropout Regulators With ShutdownBecky NimeirNo ratings yet
- Adapter (Economic Rack Mount IP Terminal With Amplifier) T-7760T-77120T-77240T-77350T-77500Document3 pagesAdapter (Economic Rack Mount IP Terminal With Amplifier) T-7760T-77120T-77240T-77350T-77500fahim_bdNo ratings yet
- Lab Report Phy 3Document4 pagesLab Report Phy 3Eri SkcNo ratings yet
- LTE KPIs TroubleshootingDocument45 pagesLTE KPIs Troubleshootingbrr.rezvaniNo ratings yet
- câu hỏi ôn tập - đềDocument16 pagescâu hỏi ôn tập - đề21110294No ratings yet
- 4 Software Testing Terminology MethodologyDocument20 pages4 Software Testing Terminology MethodologyZINNIA MAZUMDER 19BIT0155No ratings yet
- Microprocessor: Motorola 6800Document19 pagesMicroprocessor: Motorola 6800Anupam SinghNo ratings yet
- Ws c2960 48tc L DatasheetDocument5 pagesWs c2960 48tc L DatasheetMasterB.E.RNo ratings yet
- Peralatan Kesehatan Berbasis Software Di RSJ Dr. Radjiman Wediodiningrat LawangDocument10 pagesPeralatan Kesehatan Berbasis Software Di RSJ Dr. Radjiman Wediodiningrat LawangMuhammad RazieNo ratings yet
- ELE101 (Electrical Science)Document6 pagesELE101 (Electrical Science)Vivek SinghNo ratings yet
- SCHEME (2013-2014) B.E .CSE 3Rd Semester S.No Subject Code Subject Name Hours Per Week Marks CreditsDocument78 pagesSCHEME (2013-2014) B.E .CSE 3Rd Semester S.No Subject Code Subject Name Hours Per Week Marks Creditsmanish0202No ratings yet
- Thesis On Wormhole Attack in ManetDocument8 pagesThesis On Wormhole Attack in Manetaprilwbndsouthbend100% (2)
- Tugas MTK Kelompok 2Document10 pagesTugas MTK Kelompok 2anomkang25No ratings yet
- Start Up MacrosDocument4 pagesStart Up MacrosFrancesco TrivelliNo ratings yet
- VGResumeDocument4 pagesVGResumevinayakNo ratings yet
- Modicon TM3 - TM3AM6Document8 pagesModicon TM3 - TM3AM6street l CNo ratings yet
- 5800 MSAM 40100G GettingStartedDocument244 pages5800 MSAM 40100G GettingStartedCleber RodriguesNo ratings yet
- Blockchain Technology Topic: CAP Theorem and Blockchain: Basaveshwar Engineering College (Autonomous) BagalkotDocument7 pagesBlockchain Technology Topic: CAP Theorem and Blockchain: Basaveshwar Engineering College (Autonomous) BagalkotOmkar SangoteNo ratings yet
- HackpwdDocument2 pagesHackpwdjamesyu100% (2)
- Integrated CircuitsDocument15 pagesIntegrated CircuitsRobert Dimlier RiveraNo ratings yet
- Dump Load ControllerDocument5 pagesDump Load ControllernoeditaNo ratings yet
- Logix 5000 Controllers Messages: Programming ManualDocument28 pagesLogix 5000 Controllers Messages: Programming ManualDerbel WalidNo ratings yet
- LicenseDocument48 pagesLicenseMohd Nor FakhanNo ratings yet
- QuickVision DICOM - v1Document132 pagesQuickVision DICOM - v1DescargaSolamenteNo ratings yet