
Electro-Hydraulic Two-Axle Steering System For City Crane
Electro-Hydraulic Two-Axle Steering System For City Crane
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- GCS900 Installation ManualDocument166 pagesGCS900 Installation ManualAdam100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- S2 NetBox Install 06 PDFDocument103 pagesS2 NetBox Install 06 PDFJuan Pablo100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Susmic DIA1Document11 pagesSusmic DIA1Adam100% (2)
- Valtra N 2Document92 pagesValtra N 2Adam100% (2)
- You'Re in Safe Hands: PerformanceDocument1 pageYou'Re in Safe Hands: PerformanceAdamNo ratings yet
- Panasonic th-40f400k Chassis km36Document64 pagesPanasonic th-40f400k Chassis km36Claudio PietrantonioNo ratings yet
- Electric Terex CedarapidsDocument81 pagesElectric Terex CedarapidsAdam50% (2)
- Susmic10 12Document4 pagesSusmic10 12Adam0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Open PCSDocument299 pagesOpen PCSAdamNo ratings yet
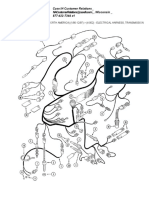
- Electrical Harness - Transmission and Connections - CaseDocument3 pagesElectrical Harness - Transmission and Connections - CaseAdamNo ratings yet
- LOA2 LOA3 Oil Burner Controls2 PDFDocument10 pagesLOA2 LOA3 Oil Burner Controls2 PDFAdamNo ratings yet
- G. Maintenance Schedule: ServiceDocument38 pagesG. Maintenance Schedule: ServiceAdam100% (1)
- Montageanleitung PVG60 PVG100 PDFDocument4 pagesMontageanleitung PVG60 PVG100 PDFAdamNo ratings yet
- A82C250Document20 pagesA82C250AdamNo ratings yet
- HAWE PLVC Programming Guide 4Document30 pagesHAWE PLVC Programming Guide 4AdamNo ratings yet
- Fastmig MF 33 Om enDocument16 pagesFastmig MF 33 Om enAdamNo ratings yet
- Operator's ManualDocument110 pagesOperator's ManualAdam0% (1)
- 2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTDocument14 pages2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTAdamNo ratings yet
- Schemat EMR BomagDocument1 pageSchemat EMR BomagAdamNo ratings yet
- Electrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsDocument1 pageElectrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsAdamNo ratings yet
- Cut40 Plasma Cutter Manual PDFDocument8 pagesCut40 Plasma Cutter Manual PDFAdamNo ratings yet
- 3B6 GenieDocument8 pages3B6 GenieAdamNo ratings yet
- Error Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"Document2 pagesError Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"AdamNo ratings yet
- Semiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSDocument4 pagesSemiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSAdamNo ratings yet
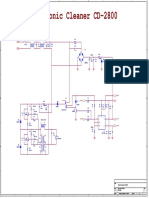
- Ultrasonic Cleaner cd2800 PDFDocument1 pageUltrasonic Cleaner cd2800 PDFAdamNo ratings yet
- Arc Inverter: Instruction ManualDocument12 pagesArc Inverter: Instruction ManualAdamNo ratings yet
- Reverse Blocking Triode Thyristors: Semiconductor Technical DataDocument4 pagesReverse Blocking Triode Thyristors: Semiconductor Technical DataAdamNo ratings yet
- Blade ProDocument4 pagesBlade ProAdamNo ratings yet
- BookDocument24 pagesBookdipakNo ratings yet
- Vol20no4 PDFDocument2 pagesVol20no4 PDFRICHARD100% (1)
- Multiband Printed Metamaterial Inverted-F Antenna (IFA) For USB ApplicationsDocument4 pagesMultiband Printed Metamaterial Inverted-F Antenna (IFA) For USB ApplicationsDr-Ahmed ElkoranyNo ratings yet
- VM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressDocument1 pageVM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressMiguelNo ratings yet
- Skyware Global 1.2m Standard RX/TX Ka-Band SFL AntennaDocument2 pagesSkyware Global 1.2m Standard RX/TX Ka-Band SFL AntennaKmiSzNo ratings yet
- Lecture 16 FM TX RCX DemosDocument19 pagesLecture 16 FM TX RCX DemosAhmad Jamal Khan JadoonNo ratings yet
- DS TSP1x1 EN GDocument56 pagesDS TSP1x1 EN GUMER SHAFAATNo ratings yet
- Diagrama Electrico 325d A3rDocument15 pagesDiagrama Electrico 325d A3rManuel BarronNo ratings yet
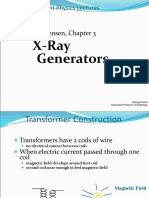
- X-Ray Generators: Resident Physics LecturesDocument54 pagesX-Ray Generators: Resident Physics LecturesAhmed TorkyNo ratings yet
- HITACHI Evcavator Fault Codes DTC & Troubleshooting PDFDocument401 pagesHITACHI Evcavator Fault Codes DTC & Troubleshooting PDFAfsar's SonNo ratings yet
- Chapter Two Literature ReviewDocument18 pagesChapter Two Literature ReviewAhmedNo ratings yet
- Cisco Epc 3925Document106 pagesCisco Epc 3925Michael L. MadsenNo ratings yet
- Downlight and SpotlightDocument4 pagesDownlight and SpotlightJeevaNo ratings yet
- URCO Series Ultimate RCO: Now For Systems With Run Capacitors!Document2 pagesURCO Series Ultimate RCO: Now For Systems With Run Capacitors!corrales_86No ratings yet
- SIKA Electronic Thermometers PDFDocument7 pagesSIKA Electronic Thermometers PDFMohamed ElsemanNo ratings yet
- Apspdcl - 2012 A.E QPDocument20 pagesApspdcl - 2012 A.E QPVeera ChaitanyaNo ratings yet
- 32-2005-3-910fc - Datasheet ZIEHL ABBEGDocument8 pages32-2005-3-910fc - Datasheet ZIEHL ABBEGray griffitNo ratings yet
- (Install) Aerisa 1250D IpureairDocument2 pages(Install) Aerisa 1250D IpureairChad100% (1)
- Samsung Cl21b501hlmxzs Chasis KSCB (N) - cb5hDocument42 pagesSamsung Cl21b501hlmxzs Chasis KSCB (N) - cb5hmister_w100% (1)
- Troubeshootings 8 Wheeler DHTC Detc-1Document27 pagesTroubeshootings 8 Wheeler DHTC Detc-1khan11k100% (1)
- Antennas and Propagation For Wireless Communication Systems, 2ndDocument553 pagesAntennas and Propagation For Wireless Communication Systems, 2ndaymen_oueslati_87No ratings yet
- Features: Boya Microelectronics Memory SeriesDocument46 pagesFeatures: Boya Microelectronics Memory Seriesmirage0706No ratings yet
- Electrochemistry Exercises - SolutionsDocument19 pagesElectrochemistry Exercises - SolutionsHữu ĐứcNo ratings yet
- Xrvs 77Document89 pagesXrvs 77thescientificrangerNo ratings yet
- Frick DBS&ST Rev eDocument52 pagesFrick DBS&ST Rev eJose TorrezNo ratings yet
- Experiment No.2: Operation of D.C Motors, Running and ReversingDocument10 pagesExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNo ratings yet
- Common USB Development Mistakes - Farnell UkDocument7 pagesCommon USB Development Mistakes - Farnell Uklxz5101No ratings yet
- An IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance AnalysisDocument7 pagesAn IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance Analysisaoc2000No ratings yet






























































































Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- GCS900 Installation ManualDocument166 pagesGCS900 Installation ManualAdam100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- S2 NetBox Install 06 PDFDocument103 pagesS2 NetBox Install 06 PDFJuan Pablo100% (1)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Susmic DIA1Document11 pagesSusmic DIA1Adam100% (2)
- Valtra N 2Document92 pagesValtra N 2Adam100% (2)
- You'Re in Safe Hands: PerformanceDocument1 pageYou'Re in Safe Hands: PerformanceAdamNo ratings yet
- Panasonic th-40f400k Chassis km36Document64 pagesPanasonic th-40f400k Chassis km36Claudio PietrantonioNo ratings yet
- Electric Terex CedarapidsDocument81 pagesElectric Terex CedarapidsAdam50% (2)
- Susmic10 12Document4 pagesSusmic10 12Adam0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Open PCSDocument299 pagesOpen PCSAdamNo ratings yet
- Electrical Harness - Transmission and Connections - CaseDocument3 pagesElectrical Harness - Transmission and Connections - CaseAdamNo ratings yet
- LOA2 LOA3 Oil Burner Controls2 PDFDocument10 pagesLOA2 LOA3 Oil Burner Controls2 PDFAdamNo ratings yet
- G. Maintenance Schedule: ServiceDocument38 pagesG. Maintenance Schedule: ServiceAdam100% (1)
- Montageanleitung PVG60 PVG100 PDFDocument4 pagesMontageanleitung PVG60 PVG100 PDFAdamNo ratings yet
- A82C250Document20 pagesA82C250AdamNo ratings yet
- HAWE PLVC Programming Guide 4Document30 pagesHAWE PLVC Programming Guide 4AdamNo ratings yet
- Fastmig MF 33 Om enDocument16 pagesFastmig MF 33 Om enAdamNo ratings yet
- Operator's ManualDocument110 pagesOperator's ManualAdam0% (1)
- 2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTDocument14 pages2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTAdamNo ratings yet
- Schemat EMR BomagDocument1 pageSchemat EMR BomagAdamNo ratings yet
- Electrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsDocument1 pageElectrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsAdamNo ratings yet
- Cut40 Plasma Cutter Manual PDFDocument8 pagesCut40 Plasma Cutter Manual PDFAdamNo ratings yet
- 3B6 GenieDocument8 pages3B6 GenieAdamNo ratings yet
- Error Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"Document2 pagesError Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"AdamNo ratings yet
- Semiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSDocument4 pagesSemiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSAdamNo ratings yet
- Ultrasonic Cleaner cd2800 PDFDocument1 pageUltrasonic Cleaner cd2800 PDFAdamNo ratings yet
- Arc Inverter: Instruction ManualDocument12 pagesArc Inverter: Instruction ManualAdamNo ratings yet
- Reverse Blocking Triode Thyristors: Semiconductor Technical DataDocument4 pagesReverse Blocking Triode Thyristors: Semiconductor Technical DataAdamNo ratings yet
- Blade ProDocument4 pagesBlade ProAdamNo ratings yet
- BookDocument24 pagesBookdipakNo ratings yet
- Vol20no4 PDFDocument2 pagesVol20no4 PDFRICHARD100% (1)
- Multiband Printed Metamaterial Inverted-F Antenna (IFA) For USB ApplicationsDocument4 pagesMultiband Printed Metamaterial Inverted-F Antenna (IFA) For USB ApplicationsDr-Ahmed ElkoranyNo ratings yet
- VM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressDocument1 pageVM-6370 Vibration Meter Piezoelectric Sensor Displacement Velocity Acc - Gain ExpressMiguelNo ratings yet
- Skyware Global 1.2m Standard RX/TX Ka-Band SFL AntennaDocument2 pagesSkyware Global 1.2m Standard RX/TX Ka-Band SFL AntennaKmiSzNo ratings yet
- Lecture 16 FM TX RCX DemosDocument19 pagesLecture 16 FM TX RCX DemosAhmad Jamal Khan JadoonNo ratings yet
- DS TSP1x1 EN GDocument56 pagesDS TSP1x1 EN GUMER SHAFAATNo ratings yet
- Diagrama Electrico 325d A3rDocument15 pagesDiagrama Electrico 325d A3rManuel BarronNo ratings yet
- X-Ray Generators: Resident Physics LecturesDocument54 pagesX-Ray Generators: Resident Physics LecturesAhmed TorkyNo ratings yet
- HITACHI Evcavator Fault Codes DTC & Troubleshooting PDFDocument401 pagesHITACHI Evcavator Fault Codes DTC & Troubleshooting PDFAfsar's SonNo ratings yet
- Chapter Two Literature ReviewDocument18 pagesChapter Two Literature ReviewAhmedNo ratings yet
- Cisco Epc 3925Document106 pagesCisco Epc 3925Michael L. MadsenNo ratings yet
- Downlight and SpotlightDocument4 pagesDownlight and SpotlightJeevaNo ratings yet
- URCO Series Ultimate RCO: Now For Systems With Run Capacitors!Document2 pagesURCO Series Ultimate RCO: Now For Systems With Run Capacitors!corrales_86No ratings yet
- SIKA Electronic Thermometers PDFDocument7 pagesSIKA Electronic Thermometers PDFMohamed ElsemanNo ratings yet
- Apspdcl - 2012 A.E QPDocument20 pagesApspdcl - 2012 A.E QPVeera ChaitanyaNo ratings yet
- 32-2005-3-910fc - Datasheet ZIEHL ABBEGDocument8 pages32-2005-3-910fc - Datasheet ZIEHL ABBEGray griffitNo ratings yet
- (Install) Aerisa 1250D IpureairDocument2 pages(Install) Aerisa 1250D IpureairChad100% (1)
- Samsung Cl21b501hlmxzs Chasis KSCB (N) - cb5hDocument42 pagesSamsung Cl21b501hlmxzs Chasis KSCB (N) - cb5hmister_w100% (1)
- Troubeshootings 8 Wheeler DHTC Detc-1Document27 pagesTroubeshootings 8 Wheeler DHTC Detc-1khan11k100% (1)
- Antennas and Propagation For Wireless Communication Systems, 2ndDocument553 pagesAntennas and Propagation For Wireless Communication Systems, 2ndaymen_oueslati_87No ratings yet
- Features: Boya Microelectronics Memory SeriesDocument46 pagesFeatures: Boya Microelectronics Memory Seriesmirage0706No ratings yet
- Electrochemistry Exercises - SolutionsDocument19 pagesElectrochemistry Exercises - SolutionsHữu ĐứcNo ratings yet
- Xrvs 77Document89 pagesXrvs 77thescientificrangerNo ratings yet
- Frick DBS&ST Rev eDocument52 pagesFrick DBS&ST Rev eJose TorrezNo ratings yet
- Experiment No.2: Operation of D.C Motors, Running and ReversingDocument10 pagesExperiment No.2: Operation of D.C Motors, Running and Reversingwrya hussainNo ratings yet
- Common USB Development Mistakes - Farnell UkDocument7 pagesCommon USB Development Mistakes - Farnell Uklxz5101No ratings yet
- An IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance AnalysisDocument7 pagesAn IEC 61000-4-30 Class A - Power Quality Monitor: Development and Performance Analysisaoc2000No ratings yet