Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- Gulfstream G500/G550 Maintenance Training Manual: FlightsafetyDocument859 pagesGulfstream G500/G550 Maintenance Training Manual: FlightsafetyRicardo Augusto100% (9)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- GCS900 Installation ManualDocument166 pagesGCS900 Installation ManualAdam100% (1)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Susmic DIA1Document11 pagesSusmic DIA1Adam100% (2)
- Valtra N 2Document92 pagesValtra N 2Adam100% (2)
- You'Re in Safe Hands: PerformanceDocument1 pageYou'Re in Safe Hands: PerformanceAdamNo ratings yet
- Control Valve Maintenance ChecklistDocument2 pagesControl Valve Maintenance Checklisttrija_mr71% (7)
- Electric Terex CedarapidsDocument81 pagesElectric Terex CedarapidsAdam50% (2)
- Susmic10 12Document4 pagesSusmic10 12Adam0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Open PCSDocument299 pagesOpen PCSAdamNo ratings yet
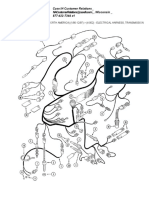
- Electrical Harness - Transmission and Connections - CaseDocument3 pagesElectrical Harness - Transmission and Connections - CaseAdamNo ratings yet
- HAZOP Write UpDocument3 pagesHAZOP Write UpGlacier Ramkissoon100% (1)
- CHAPTER 10 Position and Warning Systems PDFDocument14 pagesCHAPTER 10 Position and Warning Systems PDFxrashexNo ratings yet
- LOA2 LOA3 Oil Burner Controls2 PDFDocument10 pagesLOA2 LOA3 Oil Burner Controls2 PDFAdamNo ratings yet
- G. Maintenance Schedule: ServiceDocument38 pagesG. Maintenance Schedule: ServiceAdam100% (1)
- Montageanleitung PVG60 PVG100 PDFDocument4 pagesMontageanleitung PVG60 PVG100 PDFAdamNo ratings yet
- A82C250Document20 pagesA82C250AdamNo ratings yet
- HAWE PLVC Programming Guide 4Document30 pagesHAWE PLVC Programming Guide 4AdamNo ratings yet
- Fastmig MF 33 Om enDocument16 pagesFastmig MF 33 Om enAdamNo ratings yet
- Operator's ManualDocument110 pagesOperator's ManualAdam0% (1)
- 2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTDocument14 pages2 - Calibrations in T3 Direct AC14.3 v1.0 DRAFTAdamNo ratings yet
- Schemat EMR BomagDocument1 pageSchemat EMR BomagAdamNo ratings yet
- Electrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsDocument1 pageElectrical Data: General Data:: Data Sheet For Three-Phase Squirrel-Cage-MotorsAdamNo ratings yet
- Cut40 Plasma Cutter Manual PDFDocument8 pagesCut40 Plasma Cutter Manual PDFAdamNo ratings yet
- 3B6 GenieDocument8 pages3B6 GenieAdamNo ratings yet
- Error Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"Document2 pagesError Code Error Description Machine State 15 19 23 27 31 35 39 70 Fault Table "A"AdamNo ratings yet
- Semiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSDocument4 pagesSemiconductor Technical Data: Mechanical Characteristics: Schottky Barrier Rectifiers 30 Amperes 35 and 45 VOLTSAdamNo ratings yet
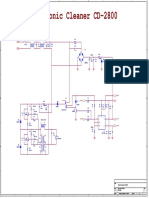
- Ultrasonic Cleaner cd2800 PDFDocument1 pageUltrasonic Cleaner cd2800 PDFAdamNo ratings yet
- Arc Inverter: Instruction ManualDocument12 pagesArc Inverter: Instruction ManualAdamNo ratings yet
- Reverse Blocking Triode Thyristors: Semiconductor Technical DataDocument4 pagesReverse Blocking Triode Thyristors: Semiconductor Technical DataAdamNo ratings yet
- Blade ProDocument4 pagesBlade ProAdamNo ratings yet
- D660 Series: Servo-Proportional Control Valves With Integrated Electronics ISO 4401 Size 05 To 10Document28 pagesD660 Series: Servo-Proportional Control Valves With Integrated Electronics ISO 4401 Size 05 To 10Ornélio ClossNo ratings yet
- Kalsi Engineering, Inc.: The Leading AOV/MOV Software..Document37 pagesKalsi Engineering, Inc.: The Leading AOV/MOV Software..Ahmed KhairiNo ratings yet
- Meclab Getting Started WorkbookDocument90 pagesMeclab Getting Started WorkbookDanilinnetoNo ratings yet
- FlowCon SM DN50-250 Tech Note PDFDocument7 pagesFlowCon SM DN50-250 Tech Note PDFViệt Đặng XuânNo ratings yet
- Specification of Aux. Boiler PDFDocument55 pagesSpecification of Aux. Boiler PDFКристиан ВлэдуцNo ratings yet
- TM 55 1905 223 24 2 PDFDocument127 pagesTM 55 1905 223 24 2 PDFMohamed HmayenNo ratings yet
- International CatalogDocument16 pagesInternational CatalogDesmond KhorNo ratings yet
- 5 - 14ME2007 - FP SymbolsDocument40 pages5 - 14ME2007 - FP SymbolsShalom LivingstonNo ratings yet
- Hydraulics & Pneumatics Chapter 3: Pneumatics (Design of Pneumatic Circuit)Document19 pagesHydraulics & Pneumatics Chapter 3: Pneumatics (Design of Pneumatic Circuit)tuanlq73No ratings yet
- German Malaysian Institute: Matrix of Course Learning Outcomes & Course ContentDocument6 pagesGerman Malaysian Institute: Matrix of Course Learning Outcomes & Course ContentAnonymous 5YMOxVQNo ratings yet
- Control Valve Selection BookDocument193 pagesControl Valve Selection BookMahmoud A. WahabNo ratings yet
- Spare Parts List: Part No.: R902542778 Designation: AL A10VNO 63 DRS /52R-VRC12K01 Status of Version: 5/2017Document17 pagesSpare Parts List: Part No.: R902542778 Designation: AL A10VNO 63 DRS /52R-VRC12K01 Status of Version: 5/2017Rodrigues de OliveiraNo ratings yet
- Actuador Lineal ValtekDocument16 pagesActuador Lineal ValtekEduardo Landa GonzalezNo ratings yet
- SpiraxSarco-B13-Condensate RemovalDocument72 pagesSpiraxSarco-B13-Condensate Removaldanenic100% (2)
- Hydraulic Control SystemDocument16 pagesHydraulic Control SystemHeerok Kumar100% (1)
- Pneumatic Steering GearDocument27 pagesPneumatic Steering GearParthivNo ratings yet
- Type 357 Control Valves: Bulletin 51.2:357Document10 pagesType 357 Control Valves: Bulletin 51.2:357Datt NguyenNo ratings yet
- Pick Constant Flow Service ManualDocument22 pagesPick Constant Flow Service ManualAriesNo ratings yet
- Q Q Q Q Q Q Q: Functional DescriptionDocument10 pagesQ Q Q Q Q Q Q: Functional DescriptionDiego Pacheco VelaNo ratings yet
- 3-98-00 Spec. For Steam Inerting Valve StationDocument11 pages3-98-00 Spec. For Steam Inerting Valve StationlightsonsNo ratings yet
- Lined Ball Valves Characterized For ControlDocument2 pagesLined Ball Valves Characterized For ControlMarcio NegraoNo ratings yet
- Control Valve Actuators and PositionersDocument13 pagesControl Valve Actuators and PositionersRahul LavandNo ratings yet
- Automatic Gas Control Valve Series 1410: Apital OntrolsDocument4 pagesAutomatic Gas Control Valve Series 1410: Apital OntrolsmdkhandaveNo ratings yet
- Saes J 001Document11 pagesSaes J 001Tarek M. Younes50% (2)
- Duty and Standby Heater Changeover Proposal V1.0Document1 pageDuty and Standby Heater Changeover Proposal V1.0jignesh chauhanNo ratings yet
- FlowCon Topic Letter PICV Vs Conventional SolutionDocument3 pagesFlowCon Topic Letter PICV Vs Conventional Solutionmohamed ghareebNo ratings yet