Download as pdf or txt
You might also like
- Metric Handbook - StructureDocument50 pagesMetric Handbook - StructurexufafruitjuiceNo ratings yet
- Reinforced Concrete Is Composed of Two Materials Concrete and Steel. Steel Is Embedded inDocument24 pagesReinforced Concrete Is Composed of Two Materials Concrete and Steel. Steel Is Embedded inJea Escabal Mosenabre100% (1)
- Name: Deepak Bhanushali EN ROLL: 160050119504 CLASS: ME-3 (A)Document24 pagesName: Deepak Bhanushali EN ROLL: 160050119504 CLASS: ME-3 (A)ABHISHEK CHOUDHARINo ratings yet
- Mechanics of Materials Chap 2-IDocument51 pagesMechanics of Materials Chap 2-I彭莉棋No ratings yet
- Rolling Contact BearingsDocument79 pagesRolling Contact BearingssnoozermanNo ratings yet
- Spring TestDocument3 pagesSpring TestSaiman SaysNo ratings yet
- EMD 5.1 Spring IntroDocument10 pagesEMD 5.1 Spring Introomkar digamabar sononeNo ratings yet
- CHP 3 - Deflection Analysis (Part I)Document17 pagesCHP 3 - Deflection Analysis (Part I)Mehmet TemizNo ratings yet
- P H Joshi Machine ToolsDocument18 pagesP H Joshi Machine ToolsዮናስNo ratings yet
- Bearing SelectionDocument22 pagesBearing SelectionAbhishek ShindeNo ratings yet
- Lecture - 09 Shaft IIDocument19 pagesLecture - 09 Shaft IIwkho0007No ratings yet
- SpringsDocument52 pagesSpringsrohan malikNo ratings yet
- ME 308 Machine Elements Ii: Spring Design - 2Document50 pagesME 308 Machine Elements Ii: Spring Design - 2xxxNo ratings yet
- CH 23Document65 pagesCH 23gowrisankarNo ratings yet
- Steel L05 Compression MembersDocument44 pagesSteel L05 Compression Membersboss0801463698No ratings yet
- Window Louver Structure Calculation SheetDocument67 pagesWindow Louver Structure Calculation SheetTONY HANNo ratings yet
- Helical SpringsDocument20 pagesHelical SpringsVINAYAK SHARMANo ratings yet
- Mechanical Springs: Exert Force. Provide Flexibility. Store or Absorb EnergyDocument68 pagesMechanical Springs: Exert Force. Provide Flexibility. Store or Absorb EnergyOtis Chu100% (1)
- Spreader Beam CalDocument98 pagesSpreader Beam CalHa HoangNo ratings yet
- Coil SpringsDocument45 pagesCoil SpringsAshraf EllamsyNo ratings yet
- Cable ElementDocument4 pagesCable Elementmidastutorials2023No ratings yet
- Tef&rT W : Indian StandardDocument7 pagesTef&rT W : Indian Standardsrinivas PulleNo ratings yet
- 7 Springs PDFDocument40 pages7 Springs PDFPradyunn HoraNo ratings yet
- Design of SpringsDocument116 pagesDesign of SpringsIvica GNo ratings yet
- Loop Length Outside DiameterDocument7 pagesLoop Length Outside DiameterShiki MasachikaNo ratings yet
- Machine Design II (MCE325)Document39 pagesMachine Design II (MCE325)Jeffrey EtimNo ratings yet
- Elements of Machine Design (Document8 pagesElements of Machine Design (v.v.ransing22No ratings yet
- 6.3 Design Values of Combined ActionsDocument7 pages6.3 Design Values of Combined Actionsmn4webNo ratings yet
- Structural Assessment of Roof Trusses: 145 South Main, Mendon, UtahDocument23 pagesStructural Assessment of Roof Trusses: 145 South Main, Mendon, UtahSupun Aravinda JayawardhaneNo ratings yet
- Disc Springs Theory and PracticeDocument40 pagesDisc Springs Theory and PracticeCarlos BenavidesNo ratings yet
- Project Proposed 2 Cell Box Culvert Title Design of 2 Cell Box CulvertDocument31 pagesProject Proposed 2 Cell Box Culvert Title Design of 2 Cell Box CulvertSudip ShresthaNo ratings yet
- 4 Lecture Notes-4 BEM2053 EM218 - Additional NotesXDocument26 pages4 Lecture Notes-4 BEM2053 EM218 - Additional NotesXMuhammad Abdullah ImranNo ratings yet
- Design Calculation of Leaf Spring For Mazda Jeep: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880Document4 pagesDesign Calculation of Leaf Spring For Mazda Jeep: © JUN 2019 - IRE Journals - Volume 2 Issue 12 - ISSN: 2456-8880Shanu KumarNo ratings yet
- Gupta PaperDocument6 pagesGupta PaperRnSi 0506No ratings yet
- I. Design Standard and SpecificationDocument25 pagesI. Design Standard and SpecificationChanna SannNo ratings yet
- MAK449 HW1 and HW2 2020-2021 SpringDocument5 pagesMAK449 HW1 and HW2 2020-2021 SpringMurat ŞahinNo ratings yet
- MEC331 CHP 02 PDFDocument65 pagesMEC331 CHP 02 PDFHaFiy HaZimNo ratings yet
- Design and Performance Analysis of PotatDocument5 pagesDesign and Performance Analysis of PotatJIAJIA LIUNo ratings yet
- Speed Reducer GearboxDocument14 pagesSpeed Reducer Gearboxعبد للهNo ratings yet
- Prestress Chapter2Document20 pagesPrestress Chapter2Ahmed HamedNo ratings yet
- Laterally LoadDocument92 pagesLaterally LoadMadhusudan MadhuNo ratings yet
- Class 1 and 2Document72 pagesClass 1 and 2Apurba barmanNo ratings yet
- 23-Rolling Contact BearingsDocument19 pages23-Rolling Contact Bearingstooocoool100% (1)
- SpringsDocument51 pagesSpringsInnocent J MathonsiNo ratings yet
- Chapter 6 PDFDocument8 pagesChapter 6 PDFWendimu TolessaNo ratings yet
- Machine Element Design Chapter 2 (Diploma)Document75 pagesMachine Element Design Chapter 2 (Diploma)Ahmad Luqman NurhakimNo ratings yet
- Bridge Modeling Comparison FBMP Vs Manual CalcDocument48 pagesBridge Modeling Comparison FBMP Vs Manual CalcSana FatimaNo ratings yet
- Design of Steel Frames Using SAP2000 - Illustrative ExamplesDocument36 pagesDesign of Steel Frames Using SAP2000 - Illustrative ExamplesvtalexNo ratings yet
- The Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial ForcesDocument73 pagesThe Analysis of Beams & Frames: Iii) Beams and Frames Subjected To Shear Force, Bending Moment and Axial Forcessohail ahmedNo ratings yet
- Design Check CofferdamDocument3 pagesDesign Check Cofferdamzms msswiNo ratings yet
- 4c-Design of Fasteners PDFDocument41 pages4c-Design of Fasteners PDFVedanth NarayanNo ratings yet
- Steel Bridges: ENCE717 - Bridge EngineeringDocument6 pagesSteel Bridges: ENCE717 - Bridge Engineeringmohamed alyozbakiNo ratings yet
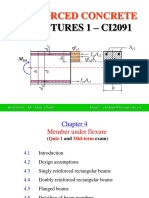
- RC1 - Chapter 4Document57 pagesRC1 - Chapter 4Khoi DuongNo ratings yet
- Lecture 21 - Splices and Shear: February 5, 2003 CVEN 444Document58 pagesLecture 21 - Splices and Shear: February 5, 2003 CVEN 444vijaykumarzNo ratings yet
- Lecture 7 SpringDocument49 pagesLecture 7 SpringAli HamzaNo ratings yet
- CE371 - Compression MemberDocument53 pagesCE371 - Compression MemberDhanya SagarNo ratings yet
- Matter of Long-Term Deflection Control in TCVNDocument21 pagesMatter of Long-Term Deflection Control in TCVNHoang Duc LocNo ratings yet
- CHAPTER 2 DC Machine Fundamentals With Exercise 2Document15 pagesCHAPTER 2 DC Machine Fundamentals With Exercise 2Max Sedric L LaylayNo ratings yet
- INA Ball ScrewsDocument16 pagesINA Ball ScrewsRuben PauwelsNo ratings yet
- Buckling and Ultimate Strength Assessment For Offshore Structures APRIL 2004Document5 pagesBuckling and Ultimate Strength Assessment For Offshore Structures APRIL 2004Flávio RodriguesNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- ME - 316 - CH - 3 - V4 Part2 NYDocument38 pagesME - 316 - CH - 3 - V4 Part2 NYxxxNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument23 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument20 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- ME - 316 - CH - 3 - V4 Part1 NYDocument21 pagesME - 316 - CH - 3 - V4 Part1 NYxxxNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument31 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- ME 308 Machine Elements Ii: Journal Bearings - 2Document75 pagesME 308 Machine Elements Ii: Journal Bearings - 2xxxNo ratings yet
- Prof. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURDocument21 pagesProf. Dr. Ahmet İhsan KUTLAR Prof. Dr. Nihat YILDIRIM Res. Assit - Eren ÖZKURxxxNo ratings yet
- ME 308 Machine Elements Ii: Journal BearingsDocument70 pagesME 308 Machine Elements Ii: Journal BearingsxxxNo ratings yet
- ME - 316 - CH - 2 - Part1 - V4 NYDocument33 pagesME - 316 - CH - 2 - Part1 - V4 NYxxxNo ratings yet
- ME 308 Machine Elements Ii: Spring Design - 2Document50 pagesME 308 Machine Elements Ii: Spring Design - 2xxxNo ratings yet
- Rolling Contact Bearings - 2: ME 308 Machine Elements IiDocument61 pagesRolling Contact Bearings - 2: ME 308 Machine Elements IixxxNo ratings yet
- Ch1ME308 Introd 2003Document22 pagesCh1ME308 Introd 2003xxxNo ratings yet
- Rolling Contact BEARINGS - Part1: ME 308 Machine Elements IiDocument58 pagesRolling Contact BEARINGS - Part1: ME 308 Machine Elements Iixxx100% (1)
- Dhruba Roy Mob: +91 9880859678 Email:: ObjectiveDocument5 pagesDhruba Roy Mob: +91 9880859678 Email:: ObjectiveAbhilash RameshNo ratings yet
- Is 800 - 1984 & 2007 Comparative StudyDocument149 pagesIs 800 - 1984 & 2007 Comparative Studyprabhu81100% (1)
- Column Buckling: (Eccentric Loaded)Document9 pagesColumn Buckling: (Eccentric Loaded)Muhammad sheryarNo ratings yet
- L4 - Steel Structures PDFDocument53 pagesL4 - Steel Structures PDFalexrodriguezabcNo ratings yet
- ANSYS Fluent V2F Turbulence Model ManualDocument100 pagesANSYS Fluent V2F Turbulence Model ManualjemanuelvNo ratings yet
- Stability Chapter 05Document8 pagesStability Chapter 05abimalainNo ratings yet
- Steel Bridge Pier CapDocument97 pagesSteel Bridge Pier CapIlie DuncaNo ratings yet
- Design of Steel Tubular Pile Subject To Axial Load and BendingDocument5 pagesDesign of Steel Tubular Pile Subject To Axial Load and BendingEdward Albert BañagaNo ratings yet
- Compression Members 1 PDFDocument9 pagesCompression Members 1 PDFlobarbiojeassNo ratings yet
- SFD KBC 2009Document171 pagesSFD KBC 2009Angel VargasNo ratings yet
- Arch - BracingDocument3 pagesArch - BracingvibishnanNo ratings yet
- International Codes V8iDocument808 pagesInternational Codes V8iSony JsdNo ratings yet
- Example: Simply Supported Laterally Unrestrained BeamDocument9 pagesExample: Simply Supported Laterally Unrestrained Beamuhu_plus6482100% (1)
- Elementos Finitos en El Análisis de Los Recipientes A Presión y Tuberías, Una Adición de Una BibliografíaDocument26 pagesElementos Finitos en El Análisis de Los Recipientes A Presión y Tuberías, Una Adición de Una BibliografíaaguirretoNo ratings yet
- Drill String-ONGC GTs-June 2014Document49 pagesDrill String-ONGC GTs-June 2014Srikanta Khuntia100% (1)
- Segmental Tunnel DesignDocument36 pagesSegmental Tunnel DesignStructural Spreadsheets0% (1)
- Seismic Liquid TanksDocument13 pagesSeismic Liquid TanksAnonymous OnzJpzNo ratings yet
- CivilBay Steel Connection Brace ConnectionDocument12 pagesCivilBay Steel Connection Brace ConnectionMichenerparkNo ratings yet
- Monotonic Compressive Strength of Advanced Ceramics at Ambient TemperatureDocument13 pagesMonotonic Compressive Strength of Advanced Ceramics at Ambient TemperaturematerthaiNo ratings yet
- Design, Analysis and Optimization of Thin Walled Semi-Monocoque Wing Structures Using Different Structural Idealizations in The Preliminary Design PhaseDocument319 pagesDesign, Analysis and Optimization of Thin Walled Semi-Monocoque Wing Structures Using Different Structural Idealizations in The Preliminary Design Phaserokhgireh_hojjatNo ratings yet
- (1979) Design and Analysis of Guyed Transmission Towers by ComputerDocument7 pages(1979) Design and Analysis of Guyed Transmission Towers by ComputerVictor BelafonteNo ratings yet
- Week 8 Lecture Material - WatermarkDocument75 pagesWeek 8 Lecture Material - WatermarkVaibhav Sharma100% (1)
- Design Procedures For Profiled Metal Sheeting and DeckingDocument11 pagesDesign Procedures For Profiled Metal Sheeting and DeckingPrapa KaranNo ratings yet
- Design of Reinforced Concrete Columns PDFDocument9 pagesDesign of Reinforced Concrete Columns PDFsile15No ratings yet
- Adama Science and Technology University Department of Civil Engineering 2023 GCDocument5 pagesAdama Science and Technology University Department of Civil Engineering 2023 GCzaruta seidNo ratings yet
- Hull Girder Response Analysis - Prismatic BeamDocument115 pagesHull Girder Response Analysis - Prismatic BeamNvlArchNo ratings yet
- Buckling-Restrained Brace and Applications - ToruTakeuchiDocument20 pagesBuckling-Restrained Brace and Applications - ToruTakeuchimafpdiracNo ratings yet
- Structures: Nakisa Haghi, Siamak Epackachi, Mohammad Taghi Kazemi TDocument24 pagesStructures: Nakisa Haghi, Siamak Epackachi, Mohammad Taghi Kazemi Tci_balaNo ratings yet
- Team 1 ReviewDocument42 pagesTeam 1 ReviewRUBAN MELONo ratings yet