
Lemur Guitarbot: Midi Robotic String Instrument: Eric Singer Kevin Larke David Bianciardi
Lemur Guitarbot: Midi Robotic String Instrument: Eric Singer Kevin Larke David Bianciardi
You might also like
- Microelectronic Circuit Design 5th Edition Jaeger Solutions ManualDocument25 pagesMicroelectronic Circuit Design 5th Edition Jaeger Solutions Manualserenadinhmzi100% (29)
- Service Manual MP50 Up To As.1999Document86 pagesService Manual MP50 Up To As.1999Hill WnagNo ratings yet
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaDocument10 pagesMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamNo ratings yet
- Voice Controlled Navigation System For Land Vehicle: Project By, Jaffer Ali.A 2009608010Document41 pagesVoice Controlled Navigation System For Land Vehicle: Project By, Jaffer Ali.A 2009608010Phoenix RulzNo ratings yet
- Robotech Labs: Research: Innovation: Development: ConsultancyDocument9 pagesRobotech Labs: Research: Innovation: Development: ConsultancytechvickyNo ratings yet
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- 13 Phys DR Hla Htay Win - LectDocument11 pages13 Phys DR Hla Htay Win - LectPanuphong NNo ratings yet
- DISEÑO DE UN ROBOT InglesDocument4 pagesDISEÑO DE UN ROBOT Inglesbambier27No ratings yet
- SolenoidDocument4 pagesSolenoidTarun ChandraNo ratings yet
- Chessbot - Final PaperDocument6 pagesChessbot - Final PaperSandeep KumarNo ratings yet
- RF Operated Swimming Bot With Pick & Place FacilityDocument11 pagesRF Operated Swimming Bot With Pick & Place FacilityVijayKumarVijayNo ratings yet
- Audio Playback With Modulation ELP 305: Design and System LaboratoryDocument6 pagesAudio Playback With Modulation ELP 305: Design and System LaboratorySamarthNo ratings yet
- Design and Implementation of A Bidirectional Acoustic Micro-Modem For Underwater Communication SystemsDocument4 pagesDesign and Implementation of A Bidirectional Acoustic Micro-Modem For Underwater Communication SystemsGayathri K MNo ratings yet
- Maze Solving Quad Rotor PDFDocument18 pagesMaze Solving Quad Rotor PDFVartolomeiDumitruNo ratings yet
- Pipe Inspection RobotDocument7 pagesPipe Inspection RobotSharanabasappa SajjanNo ratings yet
- Integrated Circuit Layout and Simulation: Prepared by Charles Sumion JKE Politeknik Kota KinabaluDocument16 pagesIntegrated Circuit Layout and Simulation: Prepared by Charles Sumion JKE Politeknik Kota KinabaluYazid Abdul HamidNo ratings yet
- Asfand Kamran LFR ReportDocument13 pagesAsfand Kamran LFR ReportAbdul RaufNo ratings yet
- A Football Kicking High Speed Actuator For A Mobile Robotic ApplicationDocument7 pagesA Football Kicking High Speed Actuator For A Mobile Robotic ApplicationMuhammad FadhilNo ratings yet
- Automatic Border Crossing Detection and Navigation of BoatDocument5 pagesAutomatic Border Crossing Detection and Navigation of BoatIJSTE100% (1)
- Underwater Robot Operation Using Optical Communication: Unit 1Document19 pagesUnderwater Robot Operation Using Optical Communication: Unit 1Sanjeev DesaiNo ratings yet
- Line Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorDocument54 pagesLine Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorHasna AbdelwahabNo ratings yet
- Documents On CampusDocument4 pagesDocuments On Campusjhon gebreNo ratings yet
- D H A C R: Igital Uman Ction Opying ObotDocument7 pagesD H A C R: Igital Uman Ction Opying ObotMaitriya DamaniNo ratings yet
- Arunai Engineering College: Robotics Micromouse On Open SourceDocument12 pagesArunai Engineering College: Robotics Micromouse On Open SourceMadhanmohan ChandrasekaranNo ratings yet
- Coil Gun Control System and User InterfaceDocument31 pagesCoil Gun Control System and User InterfacelykaonasNo ratings yet
- Vobot-Micro Servo ArmDocument17 pagesVobot-Micro Servo ArmAnonymous YvtvLWNNo ratings yet
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNo ratings yet
- Clap Sensor Project ReportDocument5 pagesClap Sensor Project Reportnrqm50% (2)
- Solar Based Automatic Grass Cutting MachineDocument8 pagesSolar Based Automatic Grass Cutting MachineVj Vicky'sNo ratings yet
- Wire Line LoggingDocument81 pagesWire Line LoggingMuhammad Waqas100% (1)
- Paper 13-Design of An Intelligent Combat Robot For War FieldDocument7 pagesPaper 13-Design of An Intelligent Combat Robot For War FieldDhruv DalwadiNo ratings yet
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocument10 pagesDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamNo ratings yet
- Audio Playback With Modulation ELP 305: Design and System LaboratoryDocument9 pagesAudio Playback With Modulation ELP 305: Design and System LaboratorySamarthNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Art:10.1007/s00170 007 1024 XDocument7 pagesArt:10.1007/s00170 007 1024 XMichael WareNo ratings yet
- 2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoDocument20 pages2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoSachin ShindeNo ratings yet
- Practical Development of An Experimental PDFDocument9 pagesPractical Development of An Experimental PDFharold medina martinezNo ratings yet
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Document4 pagesVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujNo ratings yet
- Case Study (Balancing Robot)Document10 pagesCase Study (Balancing Robot)Homer Jay ManabatNo ratings yet
- Whitepaper EncodersDocument4 pagesWhitepaper EncodersalexNo ratings yet
- Metal Detection RobotDocument6 pagesMetal Detection RobotamuthakarNo ratings yet
- Bomb Detection Robotics Using Embedded Controller: Gurdas, KaranDocument4 pagesBomb Detection Robotics Using Embedded Controller: Gurdas, KaranPayel PalNo ratings yet
- Navigator Design Report 2011 Intelligent Ground Vehicle CompetitionDocument15 pagesNavigator Design Report 2011 Intelligent Ground Vehicle CompetitionKenDaniswaraNo ratings yet
- Evaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthyDocument5 pagesEvaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthySubu ManiNo ratings yet
- Developing Mixer-Style Controllers Based PDFDocument5 pagesDeveloping Mixer-Style Controllers Based PDFskelleonNo ratings yet
- Robotic ArmDocument23 pagesRobotic ArmJapnam SodhiNo ratings yet
- Conferencepaper 2Document5 pagesConferencepaper 2Leo BoyNo ratings yet
- Articulated Robotic ArmDocument9 pagesArticulated Robotic ArmAkshat MishraNo ratings yet
- Encoder-Free Odometric System For Autonomous MicrorobotsDocument11 pagesEncoder-Free Odometric System For Autonomous MicrorobotsSergeNo ratings yet
- A New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino MicrocontrollerDocument6 pagesA New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontrollerرشيد بن صغيرNo ratings yet
- Como Hacer Un MicromouseDocument21 pagesComo Hacer Un MicromouseMachete FlyNo ratings yet
- Snake Robot ReportDocument30 pagesSnake Robot ReportAditya Vidolkar100% (1)
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- Encoders & Resolvers:: How To Choose The Right Feedback OptionDocument5 pagesEncoders & Resolvers:: How To Choose The Right Feedback OptionAdam SmithNo ratings yet
- Ball and Beam: Design and ControlDocument3 pagesBall and Beam: Design and ControlJessica RossNo ratings yet
- Robotics Group Integrated Project - Leong Kit and Cyrus Tay YehDocument21 pagesRobotics Group Integrated Project - Leong Kit and Cyrus Tay YehSamuel Leong KitNo ratings yet
- Research Proposal (Plaza)Document10 pagesResearch Proposal (Plaza)Edmarjan ConcepcionNo ratings yet
- Electronics Assignment 1-MergedDocument9 pagesElectronics Assignment 1-MergedTyrion LannisterNo ratings yet
- Rich Text Editor FileDocument39 pagesRich Text Editor FilePrem KumarNo ratings yet
- JETIR2005250Document5 pagesJETIR2005250cecoordinatorsNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Journal of Motor BehaviorDocument14 pagesJournal of Motor BehaviorMaksym TrianovNo ratings yet
- The Effect of The Coupling Between The Top Plate and The Fingerboard On The Acoustic Power Radiated by A Classical Guitar (L)Document4 pagesThe Effect of The Coupling Between The Top Plate and The Fingerboard On The Acoustic Power Radiated by A Classical Guitar (L)Maksym TrianovNo ratings yet
- International Association of Music Libraries, Archives, and Documentation Centres (IAML)Document3 pagesInternational Association of Music Libraries, Archives, and Documentation Centres (IAML)Maksym TrianovNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Music Reference Services QuarterlyDocument11 pagesMusic Reference Services QuarterlyMaksym TrianovNo ratings yet
- The Guitar in Its Fullness: Richard PinnellDocument3 pagesThe Guitar in Its Fullness: Richard PinnellMaksym TrianovNo ratings yet
- The Guitar: ClassicalDocument2 pagesThe Guitar: ClassicalMaksym TrianovNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Maxim Trianov CVDocument3 pagesMaxim Trianov CVMaksym TrianovNo ratings yet
- When Is A Guitar Not A Guitar? Cultural Form, Input Modality and ExpertiseDocument6 pagesWhen Is A Guitar Not A Guitar? Cultural Form, Input Modality and ExpertiseMaksym TrianovNo ratings yet
- Nime2017 Paper0092Document2 pagesNime2017 Paper0092Maksym TrianovNo ratings yet
- Haptic-Listening and The Classical Guitar: John A. Mcdowell and Dermot J. FurlongDocument6 pagesHaptic-Listening and The Classical Guitar: John A. Mcdowell and Dermot J. FurlongMaksym TrianovNo ratings yet
- Multimodal Guitar: A Toolbox For Augmented Guitar PerformancesDocument4 pagesMultimodal Guitar: A Toolbox For Augmented Guitar PerformancesMaksym TrianovNo ratings yet
- Bela-Based Augmented Acoustic Guitars For Inverse Sonic MicrointeractionDocument4 pagesBela-Based Augmented Acoustic Guitars For Inverse Sonic MicrointeractionMaksym TrianovNo ratings yet
- Considering Virtual & Physical Aspects in Acoustic Guitar DesignDocument4 pagesConsidering Virtual & Physical Aspects in Acoustic Guitar DesignMaksym TrianovNo ratings yet
- Nime2018 Paper0049Document6 pagesNime2018 Paper0049Maksym TrianovNo ratings yet
- A Longitudinal Field Trial With A Hemiplegic Guitarist Using The Actuated GuitarDocument6 pagesA Longitudinal Field Trial With A Hemiplegic Guitarist Using The Actuated GuitarMaksym TrianovNo ratings yet
- Magpick: An Augmented Guitar Pick For Nuanced Control: Fabio Morreale Andrea Guidi Andrew McphersonDocument6 pagesMagpick: An Augmented Guitar Pick For Nuanced Control: Fabio Morreale Andrea Guidi Andrew McphersonMaksym TrianovNo ratings yet
- Guitar Machine: Robotic Fretting AugmentationDocument6 pagesGuitar Machine: Robotic Fretting AugmentationMaksym TrianovNo ratings yet
- Percussive Fingerstyle Guitar Through The Lens of NIME: An Interview StudyDocument6 pagesPercussive Fingerstyle Guitar Through The Lens of NIME: An Interview StudyMaksym TrianovNo ratings yet
- MAGE 2.0: New Features and Its Application in The Development of A Talking GuitarDocument4 pagesMAGE 2.0: New Features and Its Application in The Development of A Talking GuitarMaksym TrianovNo ratings yet
- An Adapted Bass Guitar For One-Handed Playing: Jacob Harrison Andrew McphersonDocument2 pagesAn Adapted Bass Guitar For One-Handed Playing: Jacob Harrison Andrew McphersonMaksym TrianovNo ratings yet
- Mechanisms For Controlling Complex Sound Sources: Applications To Guitar Feedback ControlDocument4 pagesMechanisms For Controlling Complex Sound Sources: Applications To Guitar Feedback ControlMaksym TrianovNo ratings yet
- A Component-Based Approach For Modeling Plucked-Guitar Excitation SignalsDocument6 pagesA Component-Based Approach For Modeling Plucked-Guitar Excitation SignalsMaksym TrianovNo ratings yet
- Left and Right-Hand Guitar Playing Techniques Detection: Loïc Reboursière Otso Lähdeoja Thomas DrugmanDocument4 pagesLeft and Right-Hand Guitar Playing Techniques Detection: Loïc Reboursière Otso Lähdeoja Thomas DrugmanMaksym TrianovNo ratings yet
- Construction of A System For Recognizing Touch of Strings For GuitarDocument6 pagesConstruction of A System For Recognizing Touch of Strings For GuitarMaksym TrianovNo ratings yet
- Spare Parts Catalog: FV 629 Super-V+ GaminatorDocument26 pagesSpare Parts Catalog: FV 629 Super-V+ GaminatorMitica Scurtu100% (1)
- 9404 - 2-Electrical Cabinet List-EnDocument66 pages9404 - 2-Electrical Cabinet List-EnSremacNSNo ratings yet
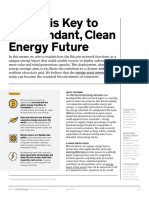
- Bitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyDocument5 pagesBitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyRaphael Perci SantiagoNo ratings yet
- Swot CiscoDocument2 pagesSwot CiscoVarun yashuNo ratings yet
- Performance AnalysisDocument32 pagesPerformance AnalysismathuNo ratings yet
- Impact of Information Technology in Accounting SystemDocument73 pagesImpact of Information Technology in Accounting SystemMichaelNo ratings yet
- Course Notes - Web Scraping and API Fundamentals in PythonDocument10 pagesCourse Notes - Web Scraping and API Fundamentals in PythonAmbrish RaiNo ratings yet
- W01 Introduction To RDocument67 pagesW01 Introduction To RLee MaryNo ratings yet
- BIOAS User Manual 20200916Document11 pagesBIOAS User Manual 20200916내이름은비밀No ratings yet
- Fruit Quality Management Using Image ProcessingDocument5 pagesFruit Quality Management Using Image ProcessingShivang MishraNo ratings yet
- NEATEL - FTTX Preconnectorized SolutionDocument43 pagesNEATEL - FTTX Preconnectorized SolutionNicholas ZhaoNo ratings yet
- Citra LogDocument4 pagesCitra LogrvrvrcrvrvvrvrNo ratings yet
- Cyberpsychology and Artificial Intelligence in Society: DR Marta R. JabłońskaDocument50 pagesCyberpsychology and Artificial Intelligence in Society: DR Marta R. JabłońskaKarolek100% (1)
- VHDL Lab ReportDocument18 pagesVHDL Lab ReportNavindu PereraNo ratings yet
- Paper 12-Application of The Tabu Search AlgorithmDocument6 pagesPaper 12-Application of The Tabu Search AlgorithmAbdul Nayeem KhalidNo ratings yet
- 3VA Molded Case Circuit Breaker: Up To 1600ADocument28 pages3VA Molded Case Circuit Breaker: Up To 1600ASAKTHIVINAYAGAMNo ratings yet
- DTEE 212 - Electrical Power IIDocument4 pagesDTEE 212 - Electrical Power IIDrando LawrenceNo ratings yet
- CN Connecting DevicesDocument3 pagesCN Connecting DevicesLife SayingsNo ratings yet
- Script EditorDocument5 pagesScript Editormazzam75No ratings yet
- Zenoss Service Dynamics RPS 4.2.5 SP732 Release NotesDocument41 pagesZenoss Service Dynamics RPS 4.2.5 SP732 Release NotesJuliana Barbosa BlancoNo ratings yet
- Model Question For Entrance TestDocument6 pagesModel Question For Entrance TestMilind MaratheNo ratings yet
- Configuration Du Switch ADocument2 pagesConfiguration Du Switch AParfaite ChiokoNo ratings yet
- Agilis 3 91x Emv Upg BDocument131 pagesAgilis 3 91x Emv Upg BBernard KabcheNo ratings yet
- CLR Collection Development PolicyDocument15 pagesCLR Collection Development Policygreat hero100% (1)
- FDocument10 pagesFDaniela ResendizNo ratings yet
- USB Audio/MIDI Interface: Owner'S ManualDocument36 pagesUSB Audio/MIDI Interface: Owner'S ManualOdayger HarperNo ratings yet
- Major Project SynopsisDocument18 pagesMajor Project SynopsisYakshu MakkarNo ratings yet
- GSTproject2 DDocument47 pagesGSTproject2 DKhanjan SiddhpuraNo ratings yet



















































































































Download as pdf or txt
You might also like
- Microelectronic Circuit Design 5th Edition Jaeger Solutions ManualDocument25 pagesMicroelectronic Circuit Design 5th Edition Jaeger Solutions Manualserenadinhmzi100% (29)
- Service Manual MP50 Up To As.1999Document86 pagesService Manual MP50 Up To As.1999Hill WnagNo ratings yet
- Microcontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaDocument10 pagesMicrocontroller Based Line Following Robot: 25 MARCH, 2018 Balerobe, EthiopiaBIniamNo ratings yet
- Voice Controlled Navigation System For Land Vehicle: Project By, Jaffer Ali.A 2009608010Document41 pagesVoice Controlled Navigation System For Land Vehicle: Project By, Jaffer Ali.A 2009608010Phoenix RulzNo ratings yet
- Robotech Labs: Research: Innovation: Development: ConsultancyDocument9 pagesRobotech Labs: Research: Innovation: Development: ConsultancytechvickyNo ratings yet
- Bharath Fire Fighting RobotDocument43 pagesBharath Fire Fighting RobotDebojit DasNo ratings yet
- 13 Phys DR Hla Htay Win - LectDocument11 pages13 Phys DR Hla Htay Win - LectPanuphong NNo ratings yet
- DISEÑO DE UN ROBOT InglesDocument4 pagesDISEÑO DE UN ROBOT Inglesbambier27No ratings yet
- SolenoidDocument4 pagesSolenoidTarun ChandraNo ratings yet
- Chessbot - Final PaperDocument6 pagesChessbot - Final PaperSandeep KumarNo ratings yet
- RF Operated Swimming Bot With Pick & Place FacilityDocument11 pagesRF Operated Swimming Bot With Pick & Place FacilityVijayKumarVijayNo ratings yet
- Audio Playback With Modulation ELP 305: Design and System LaboratoryDocument6 pagesAudio Playback With Modulation ELP 305: Design and System LaboratorySamarthNo ratings yet
- Design and Implementation of A Bidirectional Acoustic Micro-Modem For Underwater Communication SystemsDocument4 pagesDesign and Implementation of A Bidirectional Acoustic Micro-Modem For Underwater Communication SystemsGayathri K MNo ratings yet
- Maze Solving Quad Rotor PDFDocument18 pagesMaze Solving Quad Rotor PDFVartolomeiDumitruNo ratings yet
- Pipe Inspection RobotDocument7 pagesPipe Inspection RobotSharanabasappa SajjanNo ratings yet
- Integrated Circuit Layout and Simulation: Prepared by Charles Sumion JKE Politeknik Kota KinabaluDocument16 pagesIntegrated Circuit Layout and Simulation: Prepared by Charles Sumion JKE Politeknik Kota KinabaluYazid Abdul HamidNo ratings yet
- Asfand Kamran LFR ReportDocument13 pagesAsfand Kamran LFR ReportAbdul RaufNo ratings yet
- A Football Kicking High Speed Actuator For A Mobile Robotic ApplicationDocument7 pagesA Football Kicking High Speed Actuator For A Mobile Robotic ApplicationMuhammad FadhilNo ratings yet
- Automatic Border Crossing Detection and Navigation of BoatDocument5 pagesAutomatic Border Crossing Detection and Navigation of BoatIJSTE100% (1)
- Underwater Robot Operation Using Optical Communication: Unit 1Document19 pagesUnderwater Robot Operation Using Optical Communication: Unit 1Sanjeev DesaiNo ratings yet
- Line Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorDocument54 pagesLine Follower Robot Is A Mobile Machine That Can Detect and Follow Line Which Is Drawn On The FloorHasna AbdelwahabNo ratings yet
- Documents On CampusDocument4 pagesDocuments On Campusjhon gebreNo ratings yet
- D H A C R: Igital Uman Ction Opying ObotDocument7 pagesD H A C R: Igital Uman Ction Opying ObotMaitriya DamaniNo ratings yet
- Arunai Engineering College: Robotics Micromouse On Open SourceDocument12 pagesArunai Engineering College: Robotics Micromouse On Open SourceMadhanmohan ChandrasekaranNo ratings yet
- Coil Gun Control System and User InterfaceDocument31 pagesCoil Gun Control System and User InterfacelykaonasNo ratings yet
- Vobot-Micro Servo ArmDocument17 pagesVobot-Micro Servo ArmAnonymous YvtvLWNNo ratings yet
- Line Follower Robot Using LabVIEWDocument6 pagesLine Follower Robot Using LabVIEWTrần Huy Vinh QuangNo ratings yet
- Clap Sensor Project ReportDocument5 pagesClap Sensor Project Reportnrqm50% (2)
- Solar Based Automatic Grass Cutting MachineDocument8 pagesSolar Based Automatic Grass Cutting MachineVj Vicky'sNo ratings yet
- Wire Line LoggingDocument81 pagesWire Line LoggingMuhammad Waqas100% (1)
- Paper 13-Design of An Intelligent Combat Robot For War FieldDocument7 pagesPaper 13-Design of An Intelligent Combat Robot For War FieldDhruv DalwadiNo ratings yet
- Design and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverDocument10 pagesDesign and Development of Unmanned Ground and Aerial Vehicle With The Concept of Integration of Drone and RoverkoftamNo ratings yet
- Audio Playback With Modulation ELP 305: Design and System LaboratoryDocument9 pagesAudio Playback With Modulation ELP 305: Design and System LaboratorySamarthNo ratings yet
- Servo Encoder LabDocument8 pagesServo Encoder LabGoran MiljkovicNo ratings yet
- Art:10.1007/s00170 007 1024 XDocument7 pagesArt:10.1007/s00170 007 1024 XMichael WareNo ratings yet
- 2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoDocument20 pages2018 - Development of A Low-Cost Single-Axis Shake Table Based On ArduinoSachin ShindeNo ratings yet
- Practical Development of An Experimental PDFDocument9 pagesPractical Development of An Experimental PDFharold medina martinezNo ratings yet
- VSrimukhi BJPremPrasannaKumar DVSPrasad 49Document4 pagesVSrimukhi BJPremPrasannaKumar DVSPrasad 49Abhay BhujNo ratings yet
- Case Study (Balancing Robot)Document10 pagesCase Study (Balancing Robot)Homer Jay ManabatNo ratings yet
- Whitepaper EncodersDocument4 pagesWhitepaper EncodersalexNo ratings yet
- Metal Detection RobotDocument6 pagesMetal Detection RobotamuthakarNo ratings yet
- Bomb Detection Robotics Using Embedded Controller: Gurdas, KaranDocument4 pagesBomb Detection Robotics Using Embedded Controller: Gurdas, KaranPayel PalNo ratings yet
- Navigator Design Report 2011 Intelligent Ground Vehicle CompetitionDocument15 pagesNavigator Design Report 2011 Intelligent Ground Vehicle CompetitionKenDaniswaraNo ratings yet
- Evaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthyDocument5 pagesEvaluation of Kinematic Walker For Domestic Duties: Hansika Surenthar, Akshayaa Rajeswari, Mr.J.GurumurthySubu ManiNo ratings yet
- Developing Mixer-Style Controllers Based PDFDocument5 pagesDeveloping Mixer-Style Controllers Based PDFskelleonNo ratings yet
- Robotic ArmDocument23 pagesRobotic ArmJapnam SodhiNo ratings yet
- Conferencepaper 2Document5 pagesConferencepaper 2Leo BoyNo ratings yet
- Articulated Robotic ArmDocument9 pagesArticulated Robotic ArmAkshat MishraNo ratings yet
- Encoder-Free Odometric System For Autonomous MicrorobotsDocument11 pagesEncoder-Free Odometric System For Autonomous MicrorobotsSergeNo ratings yet
- A New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino MicrocontrollerDocument6 pagesA New Design and Control of A Two-Wheel Self-Balancing Robot Using The Arduino Microcontrollerرشيد بن صغيرNo ratings yet
- Como Hacer Un MicromouseDocument21 pagesComo Hacer Un MicromouseMachete FlyNo ratings yet
- Snake Robot ReportDocument30 pagesSnake Robot ReportAditya Vidolkar100% (1)
- Irjet V4i4783 PDFDocument3 pagesIrjet V4i4783 PDFBipin S CNo ratings yet
- Encoders & Resolvers:: How To Choose The Right Feedback OptionDocument5 pagesEncoders & Resolvers:: How To Choose The Right Feedback OptionAdam SmithNo ratings yet
- Ball and Beam: Design and ControlDocument3 pagesBall and Beam: Design and ControlJessica RossNo ratings yet
- Robotics Group Integrated Project - Leong Kit and Cyrus Tay YehDocument21 pagesRobotics Group Integrated Project - Leong Kit and Cyrus Tay YehSamuel Leong KitNo ratings yet
- Research Proposal (Plaza)Document10 pagesResearch Proposal (Plaza)Edmarjan ConcepcionNo ratings yet
- Electronics Assignment 1-MergedDocument9 pagesElectronics Assignment 1-MergedTyrion LannisterNo ratings yet
- Rich Text Editor FileDocument39 pagesRich Text Editor FilePrem KumarNo ratings yet
- JETIR2005250Document5 pagesJETIR2005250cecoordinatorsNo ratings yet
- Hall-Effect Sensors: Theory and ApplicationFrom EverandHall-Effect Sensors: Theory and ApplicationRating: 5 out of 5 stars5/5 (1)
- Radio Frequency Identification and Sensors: From RFID to Chipless RFIDFrom EverandRadio Frequency Identification and Sensors: From RFID to Chipless RFIDNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Journal of Motor BehaviorDocument14 pagesJournal of Motor BehaviorMaksym TrianovNo ratings yet
- The Effect of The Coupling Between The Top Plate and The Fingerboard On The Acoustic Power Radiated by A Classical Guitar (L)Document4 pagesThe Effect of The Coupling Between The Top Plate and The Fingerboard On The Acoustic Power Radiated by A Classical Guitar (L)Maksym TrianovNo ratings yet
- International Association of Music Libraries, Archives, and Documentation Centres (IAML)Document3 pagesInternational Association of Music Libraries, Archives, and Documentation Centres (IAML)Maksym TrianovNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Music Reference Services QuarterlyDocument11 pagesMusic Reference Services QuarterlyMaksym TrianovNo ratings yet
- The Guitar in Its Fullness: Richard PinnellDocument3 pagesThe Guitar in Its Fullness: Richard PinnellMaksym TrianovNo ratings yet
- The Guitar: ClassicalDocument2 pagesThe Guitar: ClassicalMaksym TrianovNo ratings yet
- Music Library AssociationDocument3 pagesMusic Library AssociationMaksym TrianovNo ratings yet
- Maxim Trianov CVDocument3 pagesMaxim Trianov CVMaksym TrianovNo ratings yet
- When Is A Guitar Not A Guitar? Cultural Form, Input Modality and ExpertiseDocument6 pagesWhen Is A Guitar Not A Guitar? Cultural Form, Input Modality and ExpertiseMaksym TrianovNo ratings yet
- Nime2017 Paper0092Document2 pagesNime2017 Paper0092Maksym TrianovNo ratings yet
- Haptic-Listening and The Classical Guitar: John A. Mcdowell and Dermot J. FurlongDocument6 pagesHaptic-Listening and The Classical Guitar: John A. Mcdowell and Dermot J. FurlongMaksym TrianovNo ratings yet
- Multimodal Guitar: A Toolbox For Augmented Guitar PerformancesDocument4 pagesMultimodal Guitar: A Toolbox For Augmented Guitar PerformancesMaksym TrianovNo ratings yet
- Bela-Based Augmented Acoustic Guitars For Inverse Sonic MicrointeractionDocument4 pagesBela-Based Augmented Acoustic Guitars For Inverse Sonic MicrointeractionMaksym TrianovNo ratings yet
- Considering Virtual & Physical Aspects in Acoustic Guitar DesignDocument4 pagesConsidering Virtual & Physical Aspects in Acoustic Guitar DesignMaksym TrianovNo ratings yet
- Nime2018 Paper0049Document6 pagesNime2018 Paper0049Maksym TrianovNo ratings yet
- A Longitudinal Field Trial With A Hemiplegic Guitarist Using The Actuated GuitarDocument6 pagesA Longitudinal Field Trial With A Hemiplegic Guitarist Using The Actuated GuitarMaksym TrianovNo ratings yet
- Magpick: An Augmented Guitar Pick For Nuanced Control: Fabio Morreale Andrea Guidi Andrew McphersonDocument6 pagesMagpick: An Augmented Guitar Pick For Nuanced Control: Fabio Morreale Andrea Guidi Andrew McphersonMaksym TrianovNo ratings yet
- Guitar Machine: Robotic Fretting AugmentationDocument6 pagesGuitar Machine: Robotic Fretting AugmentationMaksym TrianovNo ratings yet
- Percussive Fingerstyle Guitar Through The Lens of NIME: An Interview StudyDocument6 pagesPercussive Fingerstyle Guitar Through The Lens of NIME: An Interview StudyMaksym TrianovNo ratings yet
- MAGE 2.0: New Features and Its Application in The Development of A Talking GuitarDocument4 pagesMAGE 2.0: New Features and Its Application in The Development of A Talking GuitarMaksym TrianovNo ratings yet
- An Adapted Bass Guitar For One-Handed Playing: Jacob Harrison Andrew McphersonDocument2 pagesAn Adapted Bass Guitar For One-Handed Playing: Jacob Harrison Andrew McphersonMaksym TrianovNo ratings yet
- Mechanisms For Controlling Complex Sound Sources: Applications To Guitar Feedback ControlDocument4 pagesMechanisms For Controlling Complex Sound Sources: Applications To Guitar Feedback ControlMaksym TrianovNo ratings yet
- A Component-Based Approach For Modeling Plucked-Guitar Excitation SignalsDocument6 pagesA Component-Based Approach For Modeling Plucked-Guitar Excitation SignalsMaksym TrianovNo ratings yet
- Left and Right-Hand Guitar Playing Techniques Detection: Loïc Reboursière Otso Lähdeoja Thomas DrugmanDocument4 pagesLeft and Right-Hand Guitar Playing Techniques Detection: Loïc Reboursière Otso Lähdeoja Thomas DrugmanMaksym TrianovNo ratings yet
- Construction of A System For Recognizing Touch of Strings For GuitarDocument6 pagesConstruction of A System For Recognizing Touch of Strings For GuitarMaksym TrianovNo ratings yet
- Spare Parts Catalog: FV 629 Super-V+ GaminatorDocument26 pagesSpare Parts Catalog: FV 629 Super-V+ GaminatorMitica Scurtu100% (1)
- 9404 - 2-Electrical Cabinet List-EnDocument66 pages9404 - 2-Electrical Cabinet List-EnSremacNSNo ratings yet
- Bitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyDocument5 pagesBitcoin Is Key To An Abundant, Clean Energy Future: Special Report: Energy Backed Money, Satoshi EnergyRaphael Perci SantiagoNo ratings yet
- Swot CiscoDocument2 pagesSwot CiscoVarun yashuNo ratings yet
- Performance AnalysisDocument32 pagesPerformance AnalysismathuNo ratings yet
- Impact of Information Technology in Accounting SystemDocument73 pagesImpact of Information Technology in Accounting SystemMichaelNo ratings yet
- Course Notes - Web Scraping and API Fundamentals in PythonDocument10 pagesCourse Notes - Web Scraping and API Fundamentals in PythonAmbrish RaiNo ratings yet
- W01 Introduction To RDocument67 pagesW01 Introduction To RLee MaryNo ratings yet
- BIOAS User Manual 20200916Document11 pagesBIOAS User Manual 20200916내이름은비밀No ratings yet
- Fruit Quality Management Using Image ProcessingDocument5 pagesFruit Quality Management Using Image ProcessingShivang MishraNo ratings yet
- NEATEL - FTTX Preconnectorized SolutionDocument43 pagesNEATEL - FTTX Preconnectorized SolutionNicholas ZhaoNo ratings yet
- Citra LogDocument4 pagesCitra LogrvrvrcrvrvvrvrNo ratings yet
- Cyberpsychology and Artificial Intelligence in Society: DR Marta R. JabłońskaDocument50 pagesCyberpsychology and Artificial Intelligence in Society: DR Marta R. JabłońskaKarolek100% (1)
- VHDL Lab ReportDocument18 pagesVHDL Lab ReportNavindu PereraNo ratings yet
- Paper 12-Application of The Tabu Search AlgorithmDocument6 pagesPaper 12-Application of The Tabu Search AlgorithmAbdul Nayeem KhalidNo ratings yet
- 3VA Molded Case Circuit Breaker: Up To 1600ADocument28 pages3VA Molded Case Circuit Breaker: Up To 1600ASAKTHIVINAYAGAMNo ratings yet
- DTEE 212 - Electrical Power IIDocument4 pagesDTEE 212 - Electrical Power IIDrando LawrenceNo ratings yet
- CN Connecting DevicesDocument3 pagesCN Connecting DevicesLife SayingsNo ratings yet
- Script EditorDocument5 pagesScript Editormazzam75No ratings yet
- Zenoss Service Dynamics RPS 4.2.5 SP732 Release NotesDocument41 pagesZenoss Service Dynamics RPS 4.2.5 SP732 Release NotesJuliana Barbosa BlancoNo ratings yet
- Model Question For Entrance TestDocument6 pagesModel Question For Entrance TestMilind MaratheNo ratings yet
- Configuration Du Switch ADocument2 pagesConfiguration Du Switch AParfaite ChiokoNo ratings yet
- Agilis 3 91x Emv Upg BDocument131 pagesAgilis 3 91x Emv Upg BBernard KabcheNo ratings yet
- CLR Collection Development PolicyDocument15 pagesCLR Collection Development Policygreat hero100% (1)
- FDocument10 pagesFDaniela ResendizNo ratings yet
- USB Audio/MIDI Interface: Owner'S ManualDocument36 pagesUSB Audio/MIDI Interface: Owner'S ManualOdayger HarperNo ratings yet
- Major Project SynopsisDocument18 pagesMajor Project SynopsisYakshu MakkarNo ratings yet
- GSTproject2 DDocument47 pagesGSTproject2 DKhanjan SiddhpuraNo ratings yet