Download as pdf or txt
You might also like
- ABB ROBOT Training IRC5 Hardware PDFDocument97 pagesABB ROBOT Training IRC5 Hardware PDFTensaigaNo ratings yet
- Hyundai Robotics CatalogueDocument2 pagesHyundai Robotics Cataloguejitender kumar0% (1)
- L T VFD sx2000Document10 pagesL T VFD sx2000vinayakNo ratings yet
- DMC - 42x0: Galil Motion ControlDocument5 pagesDMC - 42x0: Galil Motion Controlarash hNo ratings yet
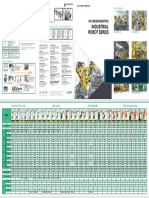
- Hyundai-robotics-Industrial Robot Series Eng 0802Document2 pagesHyundai-robotics-Industrial Robot Series Eng 0802jitender kumar0% (1)
- Is5 Catalog PDFDocument24 pagesIs5 Catalog PDFTarmatNo ratings yet
- HA006 EskiDocument4 pagesHA006 EskiBerkay GültekinNo ratings yet
- Motoman-Dx100: Industrial Robot ControllerDocument4 pagesMotoman-Dx100: Industrial Robot ControllerIgor GonçalvesNo ratings yet
- The "Solutions Platform" Universal AC DriveDocument14 pagesThe "Solutions Platform" Universal AC Drivejair pinhoNo ratings yet
- Carlo Gavazzi: RVLF Series Variable Frequency DrivesDocument8 pagesCarlo Gavazzi: RVLF Series Variable Frequency DrivesNouman MughalNo ratings yet
- OverviewDocument6 pagesOverviewakramworkrelatedNo ratings yet
- Advanced Motion Controls DPCANIA-015A400Document11 pagesAdvanced Motion Controls DPCANIA-015A400Servo2GoNo ratings yet
- Fanuc LR Mate 200ib 200ib 3lDocument4 pagesFanuc LR Mate 200ib 200ib 3lHector Calvillo GtzNo ratings yet
- Optilift RPC: Rod Pump ControllerDocument2 pagesOptilift RPC: Rod Pump ControllertarsudinNo ratings yet
- Advanced Motion Controls DPRAHIA-030A400Document11 pagesAdvanced Motion Controls DPRAHIA-030A400Servo2GoNo ratings yet
- SECOM 777: Windows CE Controller For Discontinuous Dyeing ProcessesDocument2 pagesSECOM 777: Windows CE Controller For Discontinuous Dyeing ProcessesSaid BouzianeNo ratings yet
- 11B HardwarespecDocument11 pages11B HardwarespecTa Thanh TuanNo ratings yet
- GP477R - 9.1" Amber HMI: Pro-Face Operator InterfacesDocument3 pagesGP477R - 9.1" Amber HMI: Pro-Face Operator Interfacesnam_54tnNo ratings yet
- IRC5Document2 pagesIRC5Luis Miguel ZapataNo ratings yet
- A1000 Variable Speed Drive: A Single Drive For All Your Needs With Outstanding PerformanceDocument2 pagesA1000 Variable Speed Drive: A Single Drive For All Your Needs With Outstanding PerformancesylcoNo ratings yet
- HC900 ControllerDocument75 pagesHC900 Controllerthanh_cdt01No ratings yet
- C1100 DatenblattDocument20 pagesC1100 DatenblattPaula MontserratNo ratings yet
- Advanced Motion Controls DPRAHIA-060A400Document11 pagesAdvanced Motion Controls DPRAHIA-060A400Servo2GoNo ratings yet
- Flyer A1007Document2 pagesFlyer A1007cujadiegoNo ratings yet
- Galil DMC-4000Document9 pagesGalil DMC-4000Servo2GoNo ratings yet
- DS2020 CatalogDocument12 pagesDS2020 CatalogWallerson AbreuNo ratings yet
- Product Profile: Powerflex® 4M Ac DriveDocument2 pagesProduct Profile: Powerflex® 4M Ac DriveWilliam Alfonso Cañas PratoNo ratings yet
- HC900 DataDocument24 pagesHC900 DatamoisesNo ratings yet
- MM1015-230V DatasheetDocument2 pagesMM1015-230V DatasheetgarimapandeyokiciciNo ratings yet
- Ac500-Eco: Your PLC From Abb: Unique Scalable Concept, Optimal Costs... Change For More!Document6 pagesAc500-Eco: Your PLC From Abb: Unique Scalable Concept, Optimal Costs... Change For More!Rohit BakshiNo ratings yet
- Advanced Motion Controls DPCANIS-100A400Document11 pagesAdvanced Motion Controls DPCANIS-100A400Servo2GoNo ratings yet
- Advanced Motion Controls DPRANIE-030A400Document11 pagesAdvanced Motion Controls DPRANIE-030A400Servo2GoNo ratings yet
- Advanced Motion Controls DPCANIS-015A400Document11 pagesAdvanced Motion Controls DPCANIS-015A400Servo2GoNo ratings yet
- Sartorius PR5510 X4Document4 pagesSartorius PR5510 X4KiềuBằngNo ratings yet
- HC900 Controller SpecificationDocument26 pagesHC900 Controller SpecificationHTV AT ChannelNo ratings yet
- LCI90i DisplayDocument2 pagesLCI90i DisplayMeasurementTech100% (1)
- 51 52 03 31 hc900 Controller Jan23Document27 pages51 52 03 31 hc900 Controller Jan23sarah.elfishawyNo ratings yet
- Product Data Sheet 6AU1435-2AD00-0AA0: PLC and Motion Control PerformanceDocument5 pagesProduct Data Sheet 6AU1435-2AD00-0AA0: PLC and Motion Control PerformanceChristian GonzalezNo ratings yet
- Series 0+-MODEL F Plus: Easier To Use The World Standard CNC From FANUCDocument16 pagesSeries 0+-MODEL F Plus: Easier To Use The World Standard CNC From FANUCWazabi MooNo ratings yet
- High Speed Compact Handling Robot: Controller Specifications Teach Pendant SpecificationsDocument2 pagesHigh Speed Compact Handling Robot: Controller Specifications Teach Pendant Specificationsjitender kumarNo ratings yet
- DS Secom 777ce enDocument2 pagesDS Secom 777ce enTahir SamadNo ratings yet
- Advanced Motion Controls DPCANTS-015B200Document10 pagesAdvanced Motion Controls DPCANTS-015B200Servo2GoNo ratings yet
- XGT Panel: Next Generation Micro HMI With Various DisplaysDocument6 pagesXGT Panel: Next Generation Micro HMI With Various DisplaysRohit BakshiNo ratings yet
- Grundfosliterature 5270943Document2 pagesGrundfosliterature 5270943shameer_sanju1049No ratings yet
- SPF CatalogueDocument12 pagesSPF Cataloguerahul2801No ratings yet
- NPort 5400 SeriesDocument5 pagesNPort 5400 SeriesJulio Asla CampeloNo ratings yet
- Spang 1050 Series BrochureDocument8 pagesSpang 1050 Series BrochureAnthony StevensonNo ratings yet
- Cobra Temperature Forcing System For Ate/Slt Test ApplicationsDocument2 pagesCobra Temperature Forcing System For Ate/Slt Test ApplicationssaidaNo ratings yet
- C Lang2Document428 pagesC Lang2RafaelbaraozzzNo ratings yet
- UR055 Remote Unit: Characteristics Description NotesDocument2 pagesUR055 Remote Unit: Characteristics Description NotesLight ShadowNo ratings yet
- Advanced Motion Controls DPCANIR-100A400Document11 pagesAdvanced Motion Controls DPCANIR-100A400Servo2GoNo ratings yet
- PLC's & Its Applications: BY Anil KumarDocument51 pagesPLC's & Its Applications: BY Anil Kumarsrini_kalmulaNo ratings yet
- SERIES E1200: Edition 24 Subject To AlterationsDocument19 pagesSERIES E1200: Edition 24 Subject To Alterationsoctavinavarro8236No ratings yet
- PLC para CalderasDocument26 pagesPLC para CalderasAndrés CóndorNo ratings yet
- Catalog For Master-KDocument66 pagesCatalog For Master-KAlNo ratings yet
- PLC Adam 5550kwDocument2 pagesPLC Adam 5550kwzeroseyaNo ratings yet
- Introducing The Powerful and Flexible S7-1200Document3 pagesIntroducing The Powerful and Flexible S7-1200Muhammad Ali AsifNo ratings yet
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsFrom EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsNo ratings yet
- Programmable Controller: KV Changes The Meaning of "Selection"Document60 pagesProgrammable Controller: KV Changes The Meaning of "Selection"Đinh Tiến NamNo ratings yet
- HPE Storage Course SummaryDocument3 pagesHPE Storage Course SummaryJuan DNo ratings yet
- UsbFix ReportDocument4 pagesUsbFix ReportJean PaulNo ratings yet
- Kubernetes SetupDocument215 pagesKubernetes Setupjustin jazzNo ratings yet
- Angkasa Notebook PricelistDocument1 pageAngkasa Notebook PricelistAris SriyonoNo ratings yet
- BDCOM Brochure May 2015Document48 pagesBDCOM Brochure May 2015akiemjrNo ratings yet
- VHDL FileDocument19 pagesVHDL Fileसाहिल विजNo ratings yet
- My XorgDocument17 pagesMy XorgKuldeep KushwahaNo ratings yet
- FreeRDP User Manual 2Document2 pagesFreeRDP User Manual 2vijayNo ratings yet
- Ah en TP (G) XXXSXX Hmi Firmware Upgrade 107453 en 00Document5 pagesAh en TP (G) XXXSXX Hmi Firmware Upgrade 107453 en 00Mario MorenoNo ratings yet
- MutexDocument2 pagesMutexFatima BalochNo ratings yet
- BixCheck Software Notes and Version HistoryDocument10 pagesBixCheck Software Notes and Version HistoryAl Malley100% (2)
- CS II Chapter 2Document58 pagesCS II Chapter 2Mehlam SongerwalaNo ratings yet
- KeybordDocument10 pagesKeybordapi-280027857No ratings yet
- Internal Register DefinitionDocument3 pagesInternal Register DefinitionAzizul LauNo ratings yet
- Moving Forth - Part 4Document1 pageMoving Forth - Part 4michael0richt-880205No ratings yet
- MGate MB3660 SeriesDocument3 pagesMGate MB3660 Series李柏慶No ratings yet
- MIC College of Technology: Configuring 802.1Q Trunk-Based Inter-VLAN RoutingDocument22 pagesMIC College of Technology: Configuring 802.1Q Trunk-Based Inter-VLAN RoutingVijay Kanth ThokalaNo ratings yet
- k400 Quick Start GuideDocument2 pagesk400 Quick Start GuideNovica ŽivanovićNo ratings yet
- ProgrammeDocument11 pagesProgrammeSaurabh KumarNo ratings yet
- Manual CISDocument20 pagesManual CISWaqas Arif MirzaNo ratings yet
- By David G. Messerschmitt: Understanding Networked Applications: A First CourseDocument11 pagesBy David G. Messerschmitt: Understanding Networked Applications: A First CourseAndrelyn Balangui LumingisNo ratings yet
- Kannur University Bca III Nov2018 Computer OrganisationDocument2 pagesKannur University Bca III Nov2018 Computer OrganisationneiceNo ratings yet
- TASKalfa 420i 2-Pg Specification SheetDocument2 pagesTASKalfa 420i 2-Pg Specification SheetReneeNo ratings yet
- Bios Roll v5-V6 RL and HPSPDocument9 pagesBios Roll v5-V6 RL and HPSPspyros1964No ratings yet
- Sri Vidya College of Engineering & Technology Weekly Test-2Document1 pageSri Vidya College of Engineering & Technology Weekly Test-2Ashok KumarNo ratings yet
- Ansible For TeenagersDocument23 pagesAnsible For TeenagersJignesh NakhvaNo ratings yet
- Importing Users Into Active Directory From A CSV File Using PowerShell - Me, Myself and ITDocument6 pagesImporting Users Into Active Directory From A CSV File Using PowerShell - Me, Myself and ITwmanjonjoNo ratings yet
- Walkthroughs 2 PDFDocument99 pagesWalkthroughs 2 PDFtewsttesreNo ratings yet
- QUASAR Audiogram Module Installation and Implementation GuideDocument23 pagesQUASAR Audiogram Module Installation and Implementation GuidePlinio ÁlvaroNo ratings yet