Download as pdf or txt
You might also like
- US and International Media DirectoryDocument342 pagesUS and International Media DirectoryGurnaamSingh40% (5)
- BP Approved Connection ListDocument10 pagesBP Approved Connection ListEDWIN M.PNo ratings yet
- ME3112 E5 Lab ReportDocument9 pagesME3112 E5 Lab ReportKendrick TanNo ratings yet
- Handbook On Unani Medicines With Formulae, Processes, Uses and AnalysisDocument5 pagesHandbook On Unani Medicines With Formulae, Processes, Uses and Analysismy_khan20027195100% (3)
- SAP Dictionary FrenchDocument747 pagesSAP Dictionary FrenchClaudio Di FrancescoNo ratings yet
- Vibrations Eoliennes Intro PDFDocument26 pagesVibrations Eoliennes Intro PDFkolombo17760% (1)
- A-Level Physics Coursework - MicrophonesDocument11 pagesA-Level Physics Coursework - Microphonesmattr01No ratings yet
- Numerical Analysis of The Breaking Wave Impact On The Monopile Support StructureDocument11 pagesNumerical Analysis of The Breaking Wave Impact On The Monopile Support StructuredujeveicNo ratings yet
- Phenomena, Theory and Applications of Near-Field Acoustic LevitationDocument6 pagesPhenomena, Theory and Applications of Near-Field Acoustic LevitationBert BartNo ratings yet
- Vibrations Eoliennes IntroDocument26 pagesVibrations Eoliennes Intromacjosmanuel5453No ratings yet
- John B. Bdzil - High-Explosives PerformanceDocument15 pagesJohn B. Bdzil - High-Explosives PerformancePomaxxNo ratings yet
- Design and Simulation of Bulk Acoustic Wave MEMS ResonatorDocument7 pagesDesign and Simulation of Bulk Acoustic Wave MEMS ResonatorIJeeteNo ratings yet
- Acoustic Levitation AmendDocument30 pagesAcoustic Levitation Amendezio auditore da firenzeNo ratings yet
- Coupled Membranes With Doubly Negative Mass Density and Bulk ModulusDocument15 pagesCoupled Membranes With Doubly Negative Mass Density and Bulk ModulusSergio Edgardo FloodyNo ratings yet
- Out Door Noise PropagationDocument19 pagesOut Door Noise PropagationhwjayanthiNo ratings yet
- (Exploring The Molecular Scale in Real Space) : Experiment Nr. 42 - Atomic Force MicrosDocument27 pages(Exploring The Molecular Scale in Real Space) : Experiment Nr. 42 - Atomic Force MicrosAbdullah CoreNo ratings yet
- Analysis of Acoustic Characteristics According To Design Parameter of DiaphragmDocument5 pagesAnalysis of Acoustic Characteristics According To Design Parameter of Diaphragmrajendra_krishna_1No ratings yet
- A Comparison of Strategies For Seismic Interferometry: Ó Springer Science+Business Media B.V. 2009Document21 pagesA Comparison of Strategies For Seismic Interferometry: Ó Springer Science+Business Media B.V. 2009iky77No ratings yet
- High-Density Integrated OpticsDocument11 pagesHigh-Density Integrated OpticsRomil ShahNo ratings yet
- 1982 Bookmatter EssentialsOfMedicalUltrasoundDocument25 pages1982 Bookmatter EssentialsOfMedicalUltrasoundGeorgiana PcsNo ratings yet
- MEMS Pressure Sensor Array For Aeroacoustic Analysis of The Turbulent Boundary LayerDocument4 pagesMEMS Pressure Sensor Array For Aeroacoustic Analysis of The Turbulent Boundary Layerphantom_nc91No ratings yet
- ResonanciaBak Stachowicz Noga Skrzat Effect 27 2016Document6 pagesResonanciaBak Stachowicz Noga Skrzat Effect 27 2016Joe Cristian Arias GalvánNo ratings yet
- A Study of Vibration Analysis For Gearbox CasingDocument7 pagesA Study of Vibration Analysis For Gearbox Casingom_prakash1986No ratings yet
- An Experimental Study of The Acoustic Field of A Single-Cell Piezoelectric Micromachined Ultrasound TransducerDocument6 pagesAn Experimental Study of The Acoustic Field of A Single-Cell Piezoelectric Micromachined Ultrasound Transducerhvg47No ratings yet
- Building AcousticsDocument29 pagesBuilding AcousticsdeepscubNo ratings yet
- Coutinho 2018Document6 pagesCoutinho 2018setiyawanNo ratings yet
- Chapter 2 Final CorrectionDocument53 pagesChapter 2 Final CorrectionOkpanachi JuliusNo ratings yet
- Aircraft Noise Reduction TechnologiesDocument24 pagesAircraft Noise Reduction TechnologiesMihai EnacheNo ratings yet
- Acoustic Levitation of A Large Solid SphereDocument5 pagesAcoustic Levitation of A Large Solid SpheresathyakandadaNo ratings yet
- Analysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)Document11 pagesAnalysis and Simulation of The Ultrasonic/Sonic Driller/Corer (USDC)syahrial_chaniago4769No ratings yet
- Teyssieux Proceeding Ieeeuffc v3Document4 pagesTeyssieux Proceeding Ieeeuffc v3Evilásio SouzaNo ratings yet
- Lighthill's Acoustic AnalogyDocument18 pagesLighthill's Acoustic Analogyశ్రీకాంత్ మడకNo ratings yet
- Simple Metamaterial Structure Enabling Triple-Band Perfect AbsorberDocument7 pagesSimple Metamaterial Structure Enabling Triple-Band Perfect AbsorberanhtrinhndNo ratings yet
- Characteristics of Self-Excited Shock Wave Oscillations in A Supersonic Isolator With Exit Duct ConfigurationsDocument15 pagesCharacteristics of Self-Excited Shock Wave Oscillations in A Supersonic Isolator With Exit Duct ConfigurationsSohel MahmudNo ratings yet
- Radiation PressureDocument13 pagesRadiation PressureHarumukizaNo ratings yet
- PolarizationDocument26 pagesPolarizationArijit SinghNo ratings yet
- 50 Years of Schumann ResonanceDocument15 pages50 Years of Schumann ResonanceMA-DocNo ratings yet
- Theo Mo Ultra TRan Incor Sphericalresonators 2015Document25 pagesTheo Mo Ultra TRan Incor Sphericalresonators 2015lavande16No ratings yet
- Evaluation of Damping in Dynamic Analysis of Structures: Tepes Onea Florin, Gelmambet SunaiDocument8 pagesEvaluation of Damping in Dynamic Analysis of Structures: Tepes Onea Florin, Gelmambet SunaiPrabhumk07No ratings yet
- Effects of Changing Solar Wind Conditions On Open Drift PathsDocument7 pagesEffects of Changing Solar Wind Conditions On Open Drift PathsSwadesh PatraNo ratings yet
- ICA PaperDocument6 pagesICA PaperPawanKumarNo ratings yet
- Piras 2017 Analysiscontact PDFDocument7 pagesPiras 2017 Analysiscontact PDFGowtham SivakumarNo ratings yet
- Pangu - Feke - 2005 - Analysis of Droplet Coalescence in Emulsions Subjected To Acoustic FieldsDocument11 pagesPangu - Feke - 2005 - Analysis of Droplet Coalescence in Emulsions Subjected To Acoustic FieldsJalcamNo ratings yet
- 14th September 2Document14 pages14th September 2Advin KujurNo ratings yet
- (Chapter 14) Electromagnetic Wave Propagation (86-93)Document8 pages(Chapter 14) Electromagnetic Wave Propagation (86-93)Jayvee BeruedaNo ratings yet
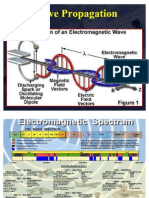
- Lesson 2 Wave PropagationDocument31 pagesLesson 2 Wave PropagationChuck LynchNo ratings yet
- Electromagnetic WavesDocument13 pagesElectromagnetic WavesHannah VsNo ratings yet
- Flow Induced Vibration Choke ValvesDocument8 pagesFlow Induced Vibration Choke Valvesharmeeksingh01No ratings yet
- Cross Wind Oscillation PDFDocument20 pagesCross Wind Oscillation PDFTAG290jtrNo ratings yet
- Shock Response SpectraDocument9 pagesShock Response SpectraAngelo De Dominicis100% (1)
- 2012 The Effect of Wall Vibrations On The Air Column Inside Trumpet Bells PDFDocument6 pages2012 The Effect of Wall Vibrations On The Air Column Inside Trumpet Bells PDFtitov33No ratings yet
- Applications With Surface Waves Extracted From Ambient Seismic NoiseDocument21 pagesApplications With Surface Waves Extracted From Ambient Seismic NoiseJennifer WatsonNo ratings yet
- A Model For Underwater Sound Levels Generated by Marine Impact Pile DrivingDocument13 pagesA Model For Underwater Sound Levels Generated by Marine Impact Pile DrivingWL HsuNo ratings yet
- Vibration and Acoustic Data For A Punch PressDocument12 pagesVibration and Acoustic Data For A Punch PressKamrul HasanNo ratings yet
- Investigation of The Effects of Air On The Dynamic Behavior of A Small Cantilever BeamDocument18 pagesInvestigation of The Effects of Air On The Dynamic Behavior of A Small Cantilever BeamAkershitAgarwalNo ratings yet
- 10 1 1 1028 6225 PDFDocument13 pages10 1 1 1028 6225 PDFGianfranco TacoNo ratings yet
- Detonation DiffractionDocument8 pagesDetonation Diffractioninvscd123No ratings yet
- 1 4945176Document5 pages1 4945176Anup M UpadhyayaNo ratings yet
- Intensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleFrom EverandIntensity of Electromagnetic Waves as a Function of Frequency, Source Distance and Aperture AngleNo ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 3: Gravitational and Inertial Control, #3No ratings yet
- Negative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4From EverandNegative Mass and Negative Refractive Index in Atom Nuclei - Nuclear Wave Equation - Gravitational and Inertial Control: Part 4: Gravitational and Inertial Control, #4No ratings yet
- Functional Properties and Health Benefits of Bioactive Peptides Derived From Spirulina: A ReviewDocument19 pagesFunctional Properties and Health Benefits of Bioactive Peptides Derived From Spirulina: A ReviewOrlando Torres CastilloNo ratings yet
- AllDocument2 pagesAllamarkiran vinayakNo ratings yet
- 1T6-220 Switched Ethernet Network Analysis and TroubleshootingDocument36 pages1T6-220 Switched Ethernet Network Analysis and TroubleshootingcertvistaNo ratings yet
- Information Technology Past Paper 2000Document4 pagesInformation Technology Past Paper 2000SwaggaMax Hylton0% (1)
- Land Grading Survey and Design: Figure 4.1: Grid Pattern Used For Staking A Field Which Is To Be Graded (A.M. Michael)Document5 pagesLand Grading Survey and Design: Figure 4.1: Grid Pattern Used For Staking A Field Which Is To Be Graded (A.M. Michael)tizazuNo ratings yet
- Verantis BlowerDocument14 pagesVerantis BlowerTaniadi SuriaNo ratings yet
- Capital Raising Opportunities For Smes On Stock Exchanges in AfricaDocument36 pagesCapital Raising Opportunities For Smes On Stock Exchanges in Africaabouraouf BATCHANo ratings yet
- Aws Route 53Document6 pagesAws Route 53splunks159No ratings yet
- Yatwin IP Camera ManualDocument47 pagesYatwin IP Camera ManualIgnoratoNo ratings yet
- Ariesogeo BR Nse Ae - 0Document2 pagesAriesogeo BR Nse Ae - 0Martine OneNo ratings yet
- Muffin Top WorkoutDocument4 pagesMuffin Top WorkoutMIBNo ratings yet
- Sankalp Research Paper 2023Document22 pagesSankalp Research Paper 2023Shivansh SinghNo ratings yet
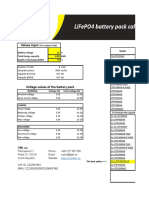
- The Best Suitable Lifepo4 Cells Values Input: (Fill in Yellow Fields)Document2 pagesThe Best Suitable Lifepo4 Cells Values Input: (Fill in Yellow Fields)HirenNo ratings yet
- Structure Gad DrawingsDocument56 pagesStructure Gad Drawingsdheeraj sehgalNo ratings yet
- FAQs On RMIBD - Hedging of Foreign Exchange Risk DTD July 14 2020Document7 pagesFAQs On RMIBD - Hedging of Foreign Exchange Risk DTD July 14 2020Anup SharmaNo ratings yet
- Ratio Analysis Heritage Foods Ltd-2Document64 pagesRatio Analysis Heritage Foods Ltd-2Varun ThatiNo ratings yet
- Wa0007Document3 pagesWa0007SharuNo ratings yet
- Piramal Ar Full 2015 16Document292 pagesPiramal Ar Full 2015 16Naman TandonNo ratings yet
- I.T Engg Sem-VIDocument14 pagesI.T Engg Sem-VIMuvin KoshtiNo ratings yet
- Dơnload Corporate Finance A Focused Approach 6th Edition Michael C Ehrhardt Eugene F Brigham Full ChapterDocument24 pagesDơnload Corporate Finance A Focused Approach 6th Edition Michael C Ehrhardt Eugene F Brigham Full Chapterkakucsdosth100% (6)
- Module 7 - Biggest Issues It Faces TodayDocument8 pagesModule 7 - Biggest Issues It Faces TodayErichelle EspineliNo ratings yet
- Sources of FinancingDocument33 pagesSources of FinancingWilmark J. RamosNo ratings yet
- Blues Scales - Euphonium (Bass Clef) - LexcerptsDocument2 pagesBlues Scales - Euphonium (Bass Clef) - LexcerptsLexcerptsNo ratings yet
- Hard Chrome Replacement by HVOF Sprayed CoatingsDocument9 pagesHard Chrome Replacement by HVOF Sprayed CoatingsR2osNo ratings yet
- Action Plan in General Parents and Teacher AssociationDocument2 pagesAction Plan in General Parents and Teacher Associationdina olayon100% (16)
- PHILIPS SLS15 Bulb 14 WATTS 120 VOLTS $ 28.08Document1 pagePHILIPS SLS15 Bulb 14 WATTS 120 VOLTS $ 28.08Dustin GriffithNo ratings yet