Download as pdf or txt
You might also like
- Gantry CraneDocument18 pagesGantry Craneamirthraj7494% (16)
- Paul Lockhart-Measurement-Belknap Press (2012)Document416 pagesPaul Lockhart-Measurement-Belknap Press (2012)Stephen Scott95% (19)
- Lecture 14Document35 pagesLecture 14AhsabNo ratings yet
- Bode PlotDocument19 pagesBode Plotkoolking786No ratings yet
- Steel Wire Ropes For Cranes Problems and SolutionsDocument34 pagesSteel Wire Ropes For Cranes Problems and Solutionsaj3107900% (1)
- Frequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005Document57 pagesFrequency Domain Analysis Using Bode Plot: Swagat Kumar July 11, 2005ishann123No ratings yet
- Online Control Lecture - 8.pdfDocument13 pagesOnline Control Lecture - 8.pdfAmylia NatashaNo ratings yet
- Response and Stability Analysis in Frequency DomainDocument54 pagesResponse and Stability Analysis in Frequency DomainMYNAMENo ratings yet
- WK 12 FR Bode Plot Nyquist May 11,2015Document104 pagesWK 12 FR Bode Plot Nyquist May 11,2015biruk1No ratings yet
- 08 Frequency Response Methods MechDocument21 pages08 Frequency Response Methods MechMamodiNo ratings yet
- Bode Plot BasicsDocument12 pagesBode Plot BasicsAnaniah DuraiNo ratings yet
- Bode Plot Tutorial: 2.1 MagnitudeDocument5 pagesBode Plot Tutorial: 2.1 MagnitudeKinza FaisalNo ratings yet
- Bode PlotDocument30 pagesBode PlotSatya SuryaNo ratings yet
- Control System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorDocument76 pagesControl System Engineering: Prof. Amitkumar B. Panchal, Assistant ProfessorSudhanshu Singh0% (1)
- EEE 3153-Control System: Lecture On Frequency Response Analysis and Bode PlotDocument56 pagesEEE 3153-Control System: Lecture On Frequency Response Analysis and Bode PlotShojeb ShojolNo ratings yet
- Bode Handout PDFDocument29 pagesBode Handout PDFSuhas ShirolNo ratings yet
- Frequency ResponseDocument28 pagesFrequency ResponseJalu PrasetyoNo ratings yet
- Frequency Response AnalysisDocument94 pagesFrequency Response AnalysisaniketNo ratings yet
- Bode Plots Lecture Notes Study MaterialDocument9 pagesBode Plots Lecture Notes Study MaterialShivam GaunsNo ratings yet
- ECE408 - Week 14-15 - Bode PlotDocument49 pagesECE408 - Week 14-15 - Bode PlotNishikata ManipolNo ratings yet
- Bode Plots: 1 Control Lectures by Lubn MoinDocument30 pagesBode Plots: 1 Control Lectures by Lubn MoinSadaqat RizviNo ratings yet
- Bode Plot - EC 502Document37 pagesBode Plot - EC 502ajay meena100% (2)
- Nichols ChartDocument9 pagesNichols ChartJin Sung AhnNo ratings yet
- Chapter 5 (Frequency Response)Document79 pagesChapter 5 (Frequency Response)Nischal MaharjanNo ratings yet
- Mi L T Ici It Microelectronic Circuits: AmplifierDocument19 pagesMi L T Ici It Microelectronic Circuits: AmplifierVishal JohriNo ratings yet
- Topic#9 Frequency Domain Analysis (Bode Plots)Document43 pagesTopic#9 Frequency Domain Analysis (Bode Plots)Ahmed ShafeekNo ratings yet
- CH5-Frequency Response PDFDocument27 pagesCH5-Frequency Response PDFRidir ZolkefleNo ratings yet
- Unit Iii Frequency ResponseDocument28 pagesUnit Iii Frequency ResponseRaghu RamNo ratings yet
- MIT16 30F10 Lec04Document16 pagesMIT16 30F10 Lec04Cristian NapoleNo ratings yet
- Notes Tee602 Bode PlotDocument23 pagesNotes Tee602 Bode PlottansnvarmaNo ratings yet
- Digital and Non-Linear Control: Frequency Domain AnalysisDocument53 pagesDigital and Non-Linear Control: Frequency Domain AnalysisSonam AlviNo ratings yet
- Chapter 3 - Stability of Control SystemDocument99 pagesChapter 3 - Stability of Control SystemTân NguyễnNo ratings yet
- EE 3600, Supplementary To Part 11Document3 pagesEE 3600, Supplementary To Part 11Muhammad Raza RafiqNo ratings yet
- 9, Frequency Response 2 Bode Plot PDFDocument29 pages9, Frequency Response 2 Bode Plot PDFwasif karimNo ratings yet
- 351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode PlotDocument42 pages351 - 27435 - EE419 - 2020 - 1 - 2 - 1 - 0 2 EE419 Lec2,3 Bode Plotyoussef hossamNo ratings yet
- CS BodeDocument61 pagesCS BodeREJITH KUMARNo ratings yet
- Bode Plot GuideDocument15 pagesBode Plot GuideKhoirul Effendi100% (1)
- Module 6Document34 pagesModule 6Debasis ChandraNo ratings yet
- Appendix 4 - Bode Diagram - 2015 - Essentials of Vehicle DynamicsDocument8 pagesAppendix 4 - Bode Diagram - 2015 - Essentials of Vehicle DynamicsJulián AvellaNo ratings yet
- R(S) C(S)Document16 pagesR(S) C(S)Ananthan SrijithNo ratings yet
- E A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (Document40 pagesE A J H T J H B e J H A: Stics. Characteri Phase and Magnitude Called Generally Are of Function As of Plots),, (MaryamRazzaqNo ratings yet
- Freq Resp BodePlots Part1Document28 pagesFreq Resp BodePlots Part1varasala sanjayNo ratings yet
- Frequency Response: 1 Systems Subjected To A Sinusoidal InputDocument8 pagesFrequency Response: 1 Systems Subjected To A Sinusoidal InputFaizal Bin IbrahimNo ratings yet
- L N A A: I A E: Ecture Otes in Udio Nalysis Ntroduction To Udio QualizersDocument8 pagesL N A A: I A E: Ecture Otes in Udio Nalysis Ntroduction To Udio QualizersFranco VillanuevaNo ratings yet
- Chapter12 BodeDocument40 pagesChapter12 BodeHassaan SiddiquiNo ratings yet
- Lecture - On Frequency - Response - Analysis and Bode PlotDocument48 pagesLecture - On Frequency - Response - Analysis and Bode PlotNazmul islamNo ratings yet
- Module 2 - 2Document68 pagesModule 2 - 2abcdNo ratings yet
- Introduction To Bode Plot: P S S Z S K S HDocument19 pagesIntroduction To Bode Plot: P S S Z S K S Halexis_buenaflorNo ratings yet
- Chapter 7Document23 pagesChapter 7lulubeingcrayNo ratings yet
- Bode PlotDocument19 pagesBode PlotyacobaschalewNo ratings yet
- 10 1 1 112 2812Document49 pages10 1 1 112 2812Abdulazeez Ayomide AdebimpeNo ratings yet
- Freq ResponseDocument23 pagesFreq Responselili aboudNo ratings yet
- Control Systems EE-475: Bode Plots Frequency Response AnalysisDocument59 pagesControl Systems EE-475: Bode Plots Frequency Response AnalysisTalha YousufNo ratings yet
- Lesson 3 - Bode - PlotsDocument11 pagesLesson 3 - Bode - PlotsHosea MuchiriNo ratings yet
- Module 5: Design of Sampled Data Control SystemsDocument5 pagesModule 5: Design of Sampled Data Control SystemsOmarShindiNo ratings yet
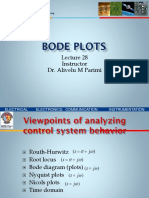
- Lecture 28 Bode Plots PDFDocument32 pagesLecture 28 Bode Plots PDFVEMIREDDY CHANDRA TEJNo ratings yet
- Bode Plot Chapter 5Document31 pagesBode Plot Chapter 5Ahmed SaidNo ratings yet
- Frequency ResponseDocument50 pagesFrequency ResponseAli AhmadNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Chapter 3: Introduction To RoboticsDocument52 pagesChapter 3: Introduction To RoboticsfatinNo ratings yet
- Screenshot 2023-04-18 at 3.12.56 PM PDFDocument116 pagesScreenshot 2023-04-18 at 3.12.56 PM PDFfatinNo ratings yet
- Smart ToolboxDocument57 pagesSmart ToolboxfatinNo ratings yet
- Kinematics Part 3Document22 pagesKinematics Part 3fatinNo ratings yet
- Robot Kinematics: Simplified Slides Prepared Based From The Robotic Institute - Carnegie MellonDocument25 pagesRobot Kinematics: Simplified Slides Prepared Based From The Robotic Institute - Carnegie MellonfatinNo ratings yet
- Robot Kinematics: Simplified Slides Prepared Based From The Robotic Institute - Carnegie MellonDocument5 pagesRobot Kinematics: Simplified Slides Prepared Based From The Robotic Institute - Carnegie MellonfatinNo ratings yet
- Three Stages of Disinfection TunnelDocument22 pagesThree Stages of Disinfection TunnelDeepu MishraNo ratings yet
- Open Ended Lab January 2020 During MCODocument4 pagesOpen Ended Lab January 2020 During MCOfatinNo ratings yet
- aSSIGNMENT 1 - NurFatinFatihahDocument3 pagesaSSIGNMENT 1 - NurFatinFatihahfatinNo ratings yet
- ch08-2 v2 POSTDocument12 pagesch08-2 v2 POSTfatinNo ratings yet
- CH - 13 - Gears Force Analysis POSTDocument39 pagesCH - 13 - Gears Force Analysis POSTfatinNo ratings yet
- Tugasan: Target 2400anc (18 Prospek) : Name Agent: Roslaily Samsudin No Id Agent: 1107369Document1 pageTugasan: Target 2400anc (18 Prospek) : Name Agent: Roslaily Samsudin No Id Agent: 1107369fatinNo ratings yet
- NMB34203 Control Systems Answer SET A Jan 2019Document13 pagesNMB34203 Control Systems Answer SET A Jan 2019fatinNo ratings yet
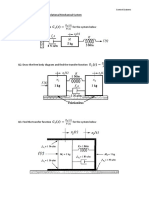
- Tutorial Ch2 - Translational SystemDocument2 pagesTutorial Ch2 - Translational SystemfatinNo ratings yet
- Rules For Making Bode PlotsDocument1 pageRules For Making Bode PlotsfatinNo ratings yet
- NMB34203 ch1 IntroDocument38 pagesNMB34203 ch1 IntrofatinNo ratings yet
- Assignment 1 Analytical and Hypermesh Simulation PDFDocument25 pagesAssignment 1 Analytical and Hypermesh Simulation PDFfatinNo ratings yet
- Chapter 6-Steps To Draw BodeDocument1 pageChapter 6-Steps To Draw BodefatinNo ratings yet
- NMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionDocument37 pagesNMB 34203 Control Systems: System Stability: The Routh-Hurwitz CriterionfatinNo ratings yet
- CH3: Mason's Rule Example: SolutionDocument3 pagesCH3: Mason's Rule Example: SolutionfatinNo ratings yet
- Mini Project ReportDocument14 pagesMini Project ReportfatinNo ratings yet
- Lecture 1-1 - Measurement Characteristics (2021)Document4 pagesLecture 1-1 - Measurement Characteristics (2021)ronald stiven bejarano larrahondoNo ratings yet
- DiscussionDocument2 pagesDiscussionNURIN BATRISYIA MOHAMAD KHIRULLAHNo ratings yet
- DLP Additional Mathematics Form 4 (Dragged) 2Document1 pageDLP Additional Mathematics Form 4 (Dragged) 2rofiNo ratings yet
- Measurement of Index of Refraction of Air and Carbon Dioxide Using Michelson InterferometerDocument2 pagesMeasurement of Index of Refraction of Air and Carbon Dioxide Using Michelson Interferometeraufi wowoNo ratings yet
- Applied Acoustics: Roy L. Deavenport, Matthew J. Gilchrest, David J. ThomsonDocument9 pagesApplied Acoustics: Roy L. Deavenport, Matthew J. Gilchrest, David J. ThomsonRoy DeavenportNo ratings yet
- Full Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full ChapterDocument36 pagesFull Download Solution Manual For Understanding Our Universe 3rd Edition by Stacy Palen Laura Kay George Blumenthal PDF Full Chapterancientypyemia1pxotk100% (26)
- Elementary SignalsDocument29 pagesElementary SignalsAngga BenningtonNo ratings yet
- Assignment No.1Document2 pagesAssignment No.1Waqar QuredhiNo ratings yet
- NTU MG5 Lectures PDFDocument209 pagesNTU MG5 Lectures PDFadsdasdassadsadNo ratings yet
- BBA Old CatalogDocument37 pagesBBA Old CatalogYASIN AHMEDNo ratings yet
- Module 5 Rational Functions Equations and InequalitiesDocument24 pagesModule 5 Rational Functions Equations and InequalitiesRoger CorrosNo ratings yet
- Current Electricity NotesDocument14 pagesCurrent Electricity NotesAngelina DanyNo ratings yet
- Btech 1st Year SyllabusDocument26 pagesBtech 1st Year SyllabusKunal JainNo ratings yet
- 09 Science Matter in Our Surrounding Test 02Document1 page09 Science Matter in Our Surrounding Test 02Himanshu Gupta0% (1)
- Principal Application Fields Heat Treatable Steel - Steel For Cold ExtrusionDocument1 pagePrincipal Application Fields Heat Treatable Steel - Steel For Cold ExtrusionBhuvnesh VermaNo ratings yet
- Geomechanics For Unconventionals Series, Vol IVDocument2 pagesGeomechanics For Unconventionals Series, Vol IVNeal NagelNo ratings yet
- Cotter JointDocument42 pagesCotter JointJatin SharmaNo ratings yet
- Oxigen Analyzer DTF-201 Operation ManualDocument32 pagesOxigen Analyzer DTF-201 Operation ManualAcruzbNo ratings yet
- Final Model Questions B.SC SEM VI DSE-04 Discipline Specific Elective Physics Experimental Physics-1Document3 pagesFinal Model Questions B.SC SEM VI DSE-04 Discipline Specific Elective Physics Experimental Physics-1Deepak KumarNo ratings yet
- Elasticity and Creep in Concrete PrintDocument57 pagesElasticity and Creep in Concrete PrintaezenkwuNo ratings yet
- Problem Set 2: FX FyDocument7 pagesProblem Set 2: FX FyMahid DandamunNo ratings yet
- Newton's Law of Cooling: e e - KTDocument2 pagesNewton's Law of Cooling: e e - KTAura Paige Montecastro-RevillaNo ratings yet
- Q. 1 - Q. 5 Carry One Mark Each.: Fact: If It Rains, Then The Field Is WetDocument17 pagesQ. 1 - Q. 5 Carry One Mark Each.: Fact: If It Rains, Then The Field Is WetSaurav KumarNo ratings yet
- Individual Minor Equipment Design: Heat Exchanger (HX-101) : CHEN 4015: Chemical Engineering Design ProjectDocument29 pagesIndividual Minor Equipment Design: Heat Exchanger (HX-101) : CHEN 4015: Chemical Engineering Design ProjectrosieNo ratings yet
- AISC-360-10 Example 001 PDFDocument9 pagesAISC-360-10 Example 001 PDFMohamed Abo-ZaidNo ratings yet
- CATAPANG, Jamiel S. - Experiment 4 (Air Properties - A4)Document25 pagesCATAPANG, Jamiel S. - Experiment 4 (Air Properties - A4)Jamiel CatapangNo ratings yet
- Mechanical Power Department 4 Year Turbo-Machinery II Centrifugal CompressorDocument5 pagesMechanical Power Department 4 Year Turbo-Machinery II Centrifugal Compressorاحمد تاشهاويNo ratings yet