Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5825)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Concrete Industrial Ground Floor Slab (TR34)Document3 pagesConcrete Industrial Ground Floor Slab (TR34)David Thomson100% (5)
- Worksheet 04 PDFDocument3 pagesWorksheet 04 PDFVijay BhaskarNo ratings yet
- CartoDocument5 pagesCartoLaarni HilarioNo ratings yet
- Design Calculation of Braking System (Landcruiser) : AbstractDocument4 pagesDesign Calculation of Braking System (Landcruiser) : AbstractDr. Aung Ko LattNo ratings yet
- ECSE 403 Midterm NotesDocument1 pageECSE 403 Midterm Notesddd ddNo ratings yet
- Jumo Cti 750Document25 pagesJumo Cti 750muratNo ratings yet
- Dynamic Analysis of Block Offloading Using Self-Propelled Modular TransportersDocument22 pagesDynamic Analysis of Block Offloading Using Self-Propelled Modular TransportersSammy ChanNo ratings yet
- Jul-Nov 2015: ME-1101 Thermodynamics Tutorial - 4Document1 pageJul-Nov 2015: ME-1101 Thermodynamics Tutorial - 4mechmuthu1No ratings yet
- X-Ray: Units of Measure and ExposureDocument17 pagesX-Ray: Units of Measure and ExposureCarlos AndrésNo ratings yet
- Realistic Math Grade 9 Exercises 65Document65 pagesRealistic Math Grade 9 Exercises 65Solo MahtabNo ratings yet
- Tensegrity, The Definition: Feras HakkakDocument36 pagesTensegrity, The Definition: Feras Hakkakf_hakkak100% (1)
- 2 ECE5560-Notes01Document11 pages2 ECE5560-Notes01arulmozhi6No ratings yet
- Laplace TransformsDocument38 pagesLaplace TransformsBantu AadhfNo ratings yet
- Larry Niven PRACTICE OF PSYCHIC TELEPORTATIONDocument2 pagesLarry Niven PRACTICE OF PSYCHIC TELEPORTATIONJ HalsteadNo ratings yet
- Week 7 Lecture Material - WatermarkDocument62 pagesWeek 7 Lecture Material - Watermarkchristi SNo ratings yet
- Reservoir Engineering Assignment 22Document11 pagesReservoir Engineering Assignment 22Mohammad Haq100% (1)
- Thermal Engineering Design Project: A Calorimeter That Measures The Specific Heat of AluminumDocument13 pagesThermal Engineering Design Project: A Calorimeter That Measures The Specific Heat of AluminumAmeva Ameve Sinangote CañosoNo ratings yet
- Shimpalee CV 092021Document19 pagesShimpalee CV 092021Para DiseNo ratings yet
- Journal Homepage: - : Manuscript HistoryDocument17 pagesJournal Homepage: - : Manuscript HistoryIJAR JOURNALNo ratings yet
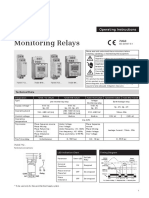
- Monitoring Relays: Operating InstructionsDocument6 pagesMonitoring Relays: Operating InstructionsRajiv ChaudhariNo ratings yet
- Maths Holiday Crossword PDFDocument1 pageMaths Holiday Crossword PDFShourya SinhaNo ratings yet
- Energy Sources: Figure 1: Current Energy Mix. The Total Energy Consumption Is Roughly 15 TW. SourceDocument39 pagesEnergy Sources: Figure 1: Current Energy Mix. The Total Energy Consumption Is Roughly 15 TW. SourceAli KarakyNo ratings yet
- Comparision of Direct-On-Line DOL and Star-Delta Motor StartingDocument6 pagesComparision of Direct-On-Line DOL and Star-Delta Motor Startinglam266No ratings yet
- Intent of AMC 2. Equipment Information 3. Hydraulics Checklist 4. Transmission Checklist 5. Electrical and C&I Checklist 6. Overall Machine ChecklistDocument13 pagesIntent of AMC 2. Equipment Information 3. Hydraulics Checklist 4. Transmission Checklist 5. Electrical and C&I Checklist 6. Overall Machine Checklistsufiyanahmed1611No ratings yet
- MAE331 LectureDocument115 pagesMAE331 LecturenachavekarinNo ratings yet
- Psa Unit 4Document21 pagesPsa Unit 4Aish KrishNo ratings yet
- Electrical Machines 2 A-C Machines PDFDocument654 pagesElectrical Machines 2 A-C Machines PDFdhanz_99No ratings yet
- Part A:Internal Electrification: Work AbstractDocument2 pagesPart A:Internal Electrification: Work AbstractSyed Noor ChishtyNo ratings yet
- Materials 07 05746Document15 pagesMaterials 07 05746Güllühan IrmakNo ratings yet
- EntropiaDocument3 pagesEntropiaMargarida PereiraNo ratings yet