Download as pdf or txt
You might also like
- Chapter 15Document71 pagesChapter 15Mogaka LucasNo ratings yet
- Proton Arena Jumbuck Engine Electrical 1.5 1.8 Service ManualDocument50 pagesProton Arena Jumbuck Engine Electrical 1.5 1.8 Service ManualEddie Jai0% (1)
- Siemens VCBDocument64 pagesSiemens VCBInayat HathiariNo ratings yet
- What Is A DriveDocument4 pagesWhat Is A DriveJibjab7No ratings yet
- What Is A Variable Frequency Drive? How Does A VFD Work?Document6 pagesWhat Is A Variable Frequency Drive? How Does A VFD Work?S.M.Touhidur RahmanNo ratings yet
- Figure 1. Simple VFD / Fan ApplicationDocument7 pagesFigure 1. Simple VFD / Fan ApplicationTapas PalNo ratings yet
- VFD Rebate Dsire: What Is A VFD?Document35 pagesVFD Rebate Dsire: What Is A VFD?Stephen Rey CaldeaNo ratings yet
- Variable Frequency DriveDocument12 pagesVariable Frequency Drive-Danielle Dimitrova100% (1)
- Electric Drives: Drive BasicsDocument5 pagesElectric Drives: Drive BasicsJisha KuruvillaNo ratings yet
- Ac Drive (Simple Theory To Understand) By: Nitish DhawanDocument10 pagesAc Drive (Simple Theory To Understand) By: Nitish DhawanNitish DhawanNo ratings yet
- AC Drives and Soft Starter Application GuideDocument5 pagesAC Drives and Soft Starter Application GuideMinh TranNo ratings yet
- Ac MotorsDocument17 pagesAc MotorsPineappleJamNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Chap2 Fyp Report NewDocument9 pagesChap2 Fyp Report NewAsad AzharNo ratings yet
- Permanent Magnet Brushless DC MotorDocument7 pagesPermanent Magnet Brushless DC MotoratultiwarihinduNo ratings yet
- Answer: Control System (Unit 1)Document18 pagesAnswer: Control System (Unit 1)Ajeet Kumar shuklaNo ratings yet
- BLDC PDFDocument36 pagesBLDC PDFZariz ZakianNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- 10-Tutorial of Induction MotorDocument48 pages10-Tutorial of Induction Motorrida.hamza.muhammadNo ratings yet
- VVVF - Working Principle & Its OperationDocument18 pagesVVVF - Working Principle & Its Operationdownload4sumitNo ratings yet
- PE 13 EnhDocument45 pagesPE 13 EnhSanthosh Kumar JNo ratings yet
- Shaded Pole Induction MotorDocument7 pagesShaded Pole Induction MotorRahul BhumkarNo ratings yet
- Diode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC ConverterDocument5 pagesDiode Clamped Multilevel Inverter Fed BLDC Motor Using SEPIC Convertermanoj kumarNo ratings yet
- Motors and DrivesDocument23 pagesMotors and DrivesharishkumarsinghNo ratings yet
- Power Analysis of PWM Motor Drives PDFDocument22 pagesPower Analysis of PWM Motor Drives PDFJaime Vanegas IriarteNo ratings yet
- Brushless DC MotorsDocument21 pagesBrushless DC MotorsSRL MECHNo ratings yet
- Four Quadrant OperationDocument9 pagesFour Quadrant OperationMOTILAL SUTHAR215291No ratings yet
- Be3251 Beee QBDocument3 pagesBe3251 Beee QBMr MovieNo ratings yet
- EES (Lec20)Document16 pagesEES (Lec20)Muhammad SagheerNo ratings yet
- Four Quadrant Speed Control of DC Motor Using ChopperDocument5 pagesFour Quadrant Speed Control of DC Motor Using ChopperismayilcNo ratings yet
- Variable Frecuency Drives For Fans PDFDocument15 pagesVariable Frecuency Drives For Fans PDFReyes SanchezNo ratings yet
- AC Drives and Soft Starter Application Guide - AllenBradleyCoDocument5 pagesAC Drives and Soft Starter Application Guide - AllenBradleyCojoyama100% (1)
- DC Shunt Motor - Speed Control & Characteristics - Electrical4U PDFDocument4 pagesDC Shunt Motor - Speed Control & Characteristics - Electrical4U PDFIvica IndjinNo ratings yet
- Chapter 7Document36 pagesChapter 7meeedooo.abo.elenenNo ratings yet
- Alternating Current Machines NotesDocument16 pagesAlternating Current Machines Notesbhenguluyanda97No ratings yet
- Embedded BLCDDocument24 pagesEmbedded BLCDDhananjay PatilNo ratings yet
- Advanced Power Electronics and Microcontrollers For Renewable Energy SystemsDocument39 pagesAdvanced Power Electronics and Microcontrollers For Renewable Energy Systemsbisrat yeshidagnaNo ratings yet
- TP2-Satya PrakashDocument13 pagesTP2-Satya Prakashm_azhagarNo ratings yet
- Servicing Schneider Altivar 66Document118 pagesServicing Schneider Altivar 66znim04No ratings yet
- Introduction: The Induction Motor Is A Three Phase AC Motor and Is The MostDocument3 pagesIntroduction: The Induction Motor Is A Three Phase AC Motor and Is The MostAnil KumarNo ratings yet
- What Are The Speed Control Method of Induction MotorsDocument12 pagesWhat Are The Speed Control Method of Induction MotorsRajeev ValunjkarNo ratings yet
- Module 3 - Shunt DC MotorDocument12 pagesModule 3 - Shunt DC MotorMARY JOY MAGAWAYNo ratings yet
- 098STUT8489034-002Document94 pages098STUT8489034-002bijalmehtaNo ratings yet
- CNC Feed DrivesDocument26 pagesCNC Feed DrivesAndrejNo ratings yet
- Electric MotorsDocument10 pagesElectric Motorsmgongo88No ratings yet
- AC MotorDocument18 pagesAC MotorCathy IsraelNo ratings yet
- AC Motors PCIDocument30 pagesAC Motors PCIThomas DuNo ratings yet
- Electrical Machines Lab March 16 UpdateDocument53 pagesElectrical Machines Lab March 16 Updatepeter vanderNo ratings yet
- 1-Phase Induction MotorDocument20 pages1-Phase Induction MotorNure AlamNo ratings yet
- Ac Machines ModuleDocument42 pagesAc Machines ModuleFranzon MelecioNo ratings yet
- Brushless MotorsDocument3 pagesBrushless MotorsHossam DawoodNo ratings yet
- DocumentDocument7 pagesDocumentakhilnandanNo ratings yet
- Implementing Embedded Speed Control For Brushless DC Motors Part1Document8 pagesImplementing Embedded Speed Control For Brushless DC Motors Part1charliesteven100% (2)
- Difference Between Slip Ring Motor With Conventional Drive and Squirrel Cage Motor With Variable Speed DriveDocument4 pagesDifference Between Slip Ring Motor With Conventional Drive and Squirrel Cage Motor With Variable Speed DriveMohamed Ayman Hefny MohamedNo ratings yet
- EEE 321 Marking SchemeDocument8 pagesEEE 321 Marking Schemefaisal sbennaNo ratings yet
- Stepper and Servo MotorDocument5 pagesStepper and Servo Motorகோகுல்நாத் ஸ்ரீ கிNo ratings yet
- BLDC Motor Application Techniques 1701585005Document50 pagesBLDC Motor Application Techniques 1701585005qn27kkbf4hNo ratings yet
- Brushless DC MotorsDocument14 pagesBrushless DC MotorsNeroGetsu100% (1)
- Brushless DC (BLDC) Motor FundamentalsDocument20 pagesBrushless DC (BLDC) Motor FundamentalsEdo007100% (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Autonomous Maintenance Part 1Document40 pagesAutonomous Maintenance Part 1mdkhandaveNo ratings yet
- Press Machine 1Document6 pagesPress Machine 1mdkhandaveNo ratings yet
- Application For Migration CertificateDocument1 pageApplication For Migration CertificatemdkhandaveNo ratings yet
- Lean 2Document12 pagesLean 2mdkhandaveNo ratings yet
- PRINTDocument1 pagePRINTmdkhandaveNo ratings yet
- 1 s2.0 S2351978917305036 MainDocument8 pages1 s2.0 S2351978917305036 MainmdkhandaveNo ratings yet
- JH QDocument2 pagesJH QmdkhandaveNo ratings yet
- Lean 1 2Document1 pageLean 1 2mdkhandaveNo ratings yet
- Presentation On Lean ManufacturingDocument11 pagesPresentation On Lean ManufacturingmdkhandaveNo ratings yet
- Press SizingDocument1 pagePress SizingmdkhandaveNo ratings yet
- QDocument2 pagesQmdkhandaveNo ratings yet
- Why Kobetsu Kaizen Called As Focused Improvement?Document3 pagesWhy Kobetsu Kaizen Called As Focused Improvement?mdkhandaveNo ratings yet
- Kan Ban 3Document1 pageKan Ban 3mdkhandaveNo ratings yet
- SummaryDocument1 pageSummarymdkhandaveNo ratings yet
- Lean 5Document1 pageLean 5mdkhandaveNo ratings yet
- Kanban 4Document1 pageKanban 4mdkhandaveNo ratings yet
- Maintenancetypes of Main.6815851.PowerpointDocument17 pagesMaintenancetypes of Main.6815851.PowerpointmdkhandaveNo ratings yet
- QDocument1 pageQmdkhandaveNo ratings yet
- TPI ListDocument1 pageTPI ListmdkhandaveNo ratings yet
- K 7Document1 pageK 7mdkhandaveNo ratings yet
- Integrated Management Systems - Three Different Levels of IntegrationDocument11 pagesIntegrated Management Systems - Three Different Levels of IntegrationmdkhandaveNo ratings yet
- Kanban 5Document1 pageKanban 5mdkhandaveNo ratings yet
- Kan Ban 1Document3 pagesKan Ban 1mdkhandaveNo ratings yet
- Technical Information: Tonnage CalculationDocument2 pagesTechnical Information: Tonnage CalculationmdkhandaveNo ratings yet
- MDK I PDFDocument1 pageMDK I PDFmdkhandaveNo ratings yet
- A Project Based Lab Report On STREET LIGHTDocument7 pagesA Project Based Lab Report On STREET LIGHTManish KumarNo ratings yet
- D Q1159bu 0 Emelec Q1159bu Cable PDFDocument1 pageD Q1159bu 0 Emelec Q1159bu Cable PDFYineth Lorena Garcia MolinaNo ratings yet
- Pulse Counters: With and Without Manual Zero ResetDocument2 pagesPulse Counters: With and Without Manual Zero ResetonglichNo ratings yet
- Laboratory Report N.01 Diodes PDFDocument5 pagesLaboratory Report N.01 Diodes PDFCristian Camilo Díaz PiñerosNo ratings yet
- Trihal TRI0400245298IP210Document2 pagesTrihal TRI0400245298IP210Eka Hospital BekasiNo ratings yet
- Combined Instrument Transformers Ivokt TMCDocument8 pagesCombined Instrument Transformers Ivokt TMCRamzan100% (1)
- Testing Electrical and Electronics: Component / Devices With MultimeterDocument17 pagesTesting Electrical and Electronics: Component / Devices With MultimeterIra CervoNo ratings yet
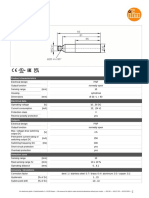
- Ia5127 00 - en GBDocument3 pagesIa5127 00 - en GBSales support TechnicalNo ratings yet
- LEM-435 - 15 - 430 - 20 - 30 - EN نسخة انجليزيةDocument12 pagesLEM-435 - 15 - 430 - 20 - 30 - EN نسخة انجليزيةfararNo ratings yet
- ECS Korry QS 389 6pin D41861Document4 pagesECS Korry QS 389 6pin D41861Peter BirdNo ratings yet
- Build Your Own Transistor Based Mobile Line Follower RobotDocument7 pagesBuild Your Own Transistor Based Mobile Line Follower Robotiky77No ratings yet
- SIGMA JT Products PDFDocument64 pagesSIGMA JT Products PDFAurel DeduNo ratings yet
- Modern Circuit Breakers and Reclosers Free Electrical Engineering Xyz Whitepaper PDFDocument24 pagesModern Circuit Breakers and Reclosers Free Electrical Engineering Xyz Whitepaper PDFm khNo ratings yet
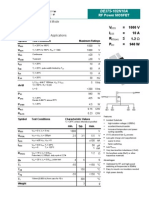
- De375 102n10aDocument5 pagesDe375 102n10akleephNo ratings yet
- Eaton Guide Specification Notes and Instructions To SpecwriterDocument10 pagesEaton Guide Specification Notes and Instructions To Specwriterhung nguyenNo ratings yet
- DrivDocument11 pagesDrivRobert Berry100% (1)
- SIEPC71061737Document1,026 pagesSIEPC71061737Alberto MolinaNo ratings yet
- P.E - 16MDocument16 pagesP.E - 16M20EUEE053- MADHUBALAN.SNo ratings yet
- Close and Trip Relay - Electric Power & Transmission & Distribution - Eng-Ti PDFDocument11 pagesClose and Trip Relay - Electric Power & Transmission & Distribution - Eng-Ti PDFalimaghamiNo ratings yet
- Analysis of Commutation in DC MachinesDocument57 pagesAnalysis of Commutation in DC Machinesagnostic07No ratings yet
- Check List Tray ListDocument9 pagesCheck List Tray ListAldeline SungahidNo ratings yet
- Purchase Plan Electrical Consumable Material, Stationery 2022Document11 pagesPurchase Plan Electrical Consumable Material, Stationery 2022Muhammad AsifNo ratings yet
- ElectrationDocument5 pagesElectrationVaronika KourNo ratings yet
- SUN2000L 2 3 3,68 4 4,6 5 KTL Data SheetDocument2 pagesSUN2000L 2 3 3,68 4 4,6 5 KTL Data SheetAdrian Ioan POPNo ratings yet
- Unit - I Synchronous GeneratorDocument25 pagesUnit - I Synchronous GeneratorVenkatesan SwamyNo ratings yet
- Benshaw Low Voltage Starters PDFDocument16 pagesBenshaw Low Voltage Starters PDFRollyDuqueCampoverdeNo ratings yet
- Table of Specification: Republic of The PhilippinesDocument1 pageTable of Specification: Republic of The PhilippinesRosel DumlaoNo ratings yet
- Silicon Epitaxial Planar Transistor SS8550Document4 pagesSilicon Epitaxial Planar Transistor SS8550OreolNo ratings yet