
Optimum Linear Filter (Part II)
Optimum Linear Filter (Part II)
You might also like
- Service Manual SM-5300: PC Scale Printer Edition 1Document132 pagesService Manual SM-5300: PC Scale Printer Edition 1Kevin ASR100% (2)
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- Schrödinger Equation, Operators, EtcDocument22 pagesSchrödinger Equation, Operators, EtcJMNo ratings yet
- Ch02 WienerFilters Lect 04Document51 pagesCh02 WienerFilters Lect 04DrIhsan Ul HaqNo ratings yet
- Ch02 WienerFiltersLECTURE05Document37 pagesCh02 WienerFiltersLECTURE05DrIhsan Ul HaqNo ratings yet
- Lecture 11 InvertersDocument39 pagesLecture 11 InvertersYsabel PumaNo ratings yet
- Image Restoration PresDocument28 pagesImage Restoration PresbharadwajmahankaliNo ratings yet
- l10 - Data Fusion and Estimation v22Document44 pagesl10 - Data Fusion and Estimation v22Pham Xuan ThuyNo ratings yet
- Optimum ReceiverDocument25 pagesOptimum Receiverはじめ ましてNo ratings yet
- Chapter 3 - Variance Reduction MethodsDocument20 pagesChapter 3 - Variance Reduction MethodsCharbel MerhiNo ratings yet
- T3 - State Variable Models - 2021Document40 pagesT3 - State Variable Models - 2021James ChanNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- Vibrations ME400Document32 pagesVibrations ME400Nick MezaNo ratings yet
- L4 Random Signals and Noise PDFDocument55 pagesL4 Random Signals and Noise PDFcriscab12345No ratings yet
- ADC Unit 3Document26 pagesADC Unit 3Alok kumarNo ratings yet
- SESM3030 - 01 IntroductionDocument15 pagesSESM3030 - 01 Introductionjiales225No ratings yet
- Week 6 - Important Random Variables and Their DistributionsDocument24 pagesWeek 6 - Important Random Variables and Their DistributionsHaris GhafoorNo ratings yet
- 8 HeteroscedasticityDocument24 pages8 HeteroscedasticityDavid AyalaNo ratings yet
- Pattern Classification 11. Backpropagation & Time-Series ForecastingDocument78 pagesPattern Classification 11. Backpropagation & Time-Series ForecastingMostafa MohamedNo ratings yet
- Diffraction SMITDocument25 pagesDiffraction SMITRNo ratings yet
- 4.1 TransmissionDocument41 pages4.1 TransmissionLIM SHANYOUNo ratings yet
- L11 DC To AC ConveretrsDocument38 pagesL11 DC To AC Converetrsmohamedsamy9878No ratings yet
- 1sensitivity Lecture SlidesDocument59 pages1sensitivity Lecture SlidesKhaled HamdaouiNo ratings yet
- Chapter 4 Linear Estimation of SignalsDocument54 pagesChapter 4 Linear Estimation of SignalstadeleNo ratings yet
- Applied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Quadratic Programs (QP)Document60 pagesApplied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Quadratic Programs (QP)José Manuel Slater CarrascoNo ratings yet
- Pattern Classification 10. Linear Perceptron, Least Squares & Multi-Layer NnsDocument38 pagesPattern Classification 10. Linear Perceptron, Least Squares & Multi-Layer NnsMostafa MohamedNo ratings yet
- RegressionDocument17 pagesRegressionRenhe SONGNo ratings yet
- 2018-12-11 MMC Merlin - ACEPE Summary CourseDocument36 pages2018-12-11 MMC Merlin - ACEPE Summary CourseEfra IbacetaNo ratings yet
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloNo ratings yet
- Stability of Nonlinear SystemsDocument34 pagesStability of Nonlinear SystemsAmgad_A_Salama_239No ratings yet
- Stream CipherDocument17 pagesStream CipherhardisnetworkNo ratings yet
- Variance Reduction TechniquesDocument19 pagesVariance Reduction TechniquesepuenteNo ratings yet
- 9 - Correlation, Energy Spectral Density, and Power Spectral DensityDocument34 pages9 - Correlation, Energy Spectral Density, and Power Spectral DensityChristine AllenNo ratings yet
- RLS PresentationDocument29 pagesRLS PresentationGidey LeulNo ratings yet
- Lecturer 4 Regression AnalysisDocument29 pagesLecturer 4 Regression AnalysisShahzad Khan100% (1)
- Chapter 02Document33 pagesChapter 02Taiyeb Hasan SakibNo ratings yet
- MV FinalDocument64 pagesMV FinaldominiojhtNo ratings yet
- 1.2 Discrete-Time Random Processes: 1.2.1 Sample Spaces and EventsDocument7 pages1.2 Discrete-Time Random Processes: 1.2.1 Sample Spaces and EventsÖmer Faruk DemirNo ratings yet
- 6 Image SegmentationDocument80 pages6 Image SegmentationLingala JayapradaNo ratings yet
- 14.camera CalibrationDocument25 pages14.camera CalibrationUsman MaqboolNo ratings yet
- Module01 ProbabilityAndStatisticsDocument68 pagesModule01 ProbabilityAndStatisticsDevansh GuptaNo ratings yet
- Session 1 Day 4Document26 pagesSession 1 Day 4Guivis ZeufackNo ratings yet
- SS02 LTI System 4Document11 pagesSS02 LTI System 4Miee葉米亞No ratings yet
- Sample Correlation Coefficient: X Value and Is Called The Simple Regression EquationDocument1 pageSample Correlation Coefficient: X Value and Is Called The Simple Regression EquationaaxdhpNo ratings yet
- Applied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Basic Solution Methods For Unconstrained ProblemsDocument68 pagesApplied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Basic Solution Methods For Unconstrained ProblemsJosé Manuel Slater CarrascoNo ratings yet
- Signals and Systems: DR Tania StathakiDocument20 pagesSignals and Systems: DR Tania StathakikentNo ratings yet
- Cape Applied Mathematics Cheat SheetDocument6 pagesCape Applied Mathematics Cheat SheetNobody JamesNo ratings yet
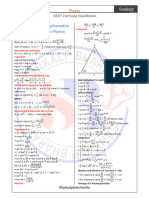
- Physics Formula HandbookDocument54 pagesPhysics Formula Handbook3198chethaNo ratings yet
- Robot Arm KINEMATICs and DynamicsDocument27 pagesRobot Arm KINEMATICs and DynamicsTirth VyasNo ratings yet
- DSP Sp23 Wk13 230517Document17 pagesDSP Sp23 Wk13 230517Qaiser AbbasNo ratings yet
- Estimation Theory Lec 1 - InTRODUCTIONDocument21 pagesEstimation Theory Lec 1 - InTRODUCTIONMohamed Sayed 201-600-075No ratings yet
- 08 Random Number GenerationDocument28 pages08 Random Number GenerationRupa DnNo ratings yet
- Signaling Over Bandlimited Channels Oct 30 Nov 2 6Document39 pagesSignaling Over Bandlimited Channels Oct 30 Nov 2 6Shravani KodeNo ratings yet
- Signals and Systems: Lecture 13 Wednesday 6 December 2017Document34 pagesSignals and Systems: Lecture 13 Wednesday 6 December 2017aniNo ratings yet
- Lecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFDocument43 pagesLecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFRakhmeen gulNo ratings yet
- Unit 3 Lesson 0 Law of ExponentsDocument12 pagesUnit 3 Lesson 0 Law of ExponentsChristine MeollyNo ratings yet
- Mechanical Vibrations: Why Do We Study ?Document27 pagesMechanical Vibrations: Why Do We Study ?sagar kumarNo ratings yet
- DTEE 212 - Electrical Power IIDocument4 pagesDTEE 212 - Electrical Power IIDrando LawrenceNo ratings yet
- A Customer Needs Layer 2 Switches That Provide Basic FunctionalityDocument15 pagesA Customer Needs Layer 2 Switches That Provide Basic FunctionalityXetraNo ratings yet
- Test Universe v3 10 ClientServer Booklet ENUDocument12 pagesTest Universe v3 10 ClientServer Booklet ENUUdomsak ThanatkhaNo ratings yet
- Laura SchindlerDocument10 pagesLaura SchindlerShasha IkaNo ratings yet
- DVCon Europe 2015 TA1 8 PaperDocument7 pagesDVCon Europe 2015 TA1 8 PaperJon DCNo ratings yet
- IWR 0404 Ed01 TigerTMS IChargeR50.3 OmniPCXEnterpriseR12.4Document56 pagesIWR 0404 Ed01 TigerTMS IChargeR50.3 OmniPCXEnterpriseR12.4Dinusha BandaraNo ratings yet
- Waspmote Lorawan Networking GuideDocument50 pagesWaspmote Lorawan Networking Guideirfan bahadonNo ratings yet
- Bpops 203Document2 pagesBpops 203yoga vNo ratings yet
- Eapp Diagnostic TestDocument4 pagesEapp Diagnostic TestEMzFajardoNo ratings yet
- Programação Ventiladores Nº08-12Document6 pagesProgramação Ventiladores Nº08-12Bruno SacciottiNo ratings yet
- 7 - Module 7 - Networks, Internet and Internet ProtocolDocument37 pages7 - Module 7 - Networks, Internet and Internet ProtocolJoey MetranNo ratings yet
- w4 Wireless Security Camera System ManualDocument17 pagesw4 Wireless Security Camera System ManualMarly SalasNo ratings yet
- Fundamentals of Network Security Assignment 1Document9 pagesFundamentals of Network Security Assignment 1Tate Ngeekepo Kemwiifaneni NdeilukaNo ratings yet
- Multivariate Analysis An OverviewDocument9 pagesMultivariate Analysis An OverviewmerinNo ratings yet
- SENR11930001Document5 pagesSENR11930001Muhammad RamadhanNo ratings yet
- Zenoss Service Dynamics RPS 4.2.5 SP732 Release NotesDocument41 pagesZenoss Service Dynamics RPS 4.2.5 SP732 Release NotesJuliana Barbosa BlancoNo ratings yet
- Dendy Battltanks (260 игр) - список игр в комплектеDocument5 pagesDendy Battltanks (260 игр) - список игр в комплектеoleg sokolovNo ratings yet
- Chapter 6Document5 pagesChapter 6Nermine LimemeNo ratings yet
- 1901 PC Monochrome Monitor Service Manual 314970-01 (1987 Apr)Document22 pages1901 PC Monochrome Monitor Service Manual 314970-01 (1987 Apr)Nicola BonettiNo ratings yet
- OSSEE Guide QuestionsDocument2 pagesOSSEE Guide QuestionsGlyneth Dela TorreNo ratings yet
- PLC Week 10 - Function Block ProgrammingDocument14 pagesPLC Week 10 - Function Block ProgrammingEr Darsh ChahalNo ratings yet
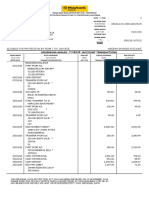
- MBBsavings - 158118 107625 - 2016 12 31Document7 pagesMBBsavings - 158118 107625 - 2016 12 31Zahar ZekNo ratings yet
- Module 4 ADocument29 pagesModule 4 AAKSHITH V SNo ratings yet
- H Bridge: Acc. ISO13850Document5 pagesH Bridge: Acc. ISO13850Mario Alfaro CanoNo ratings yet
- A Lower Bound For The Worst Case: Theorem 8.1Document2 pagesA Lower Bound For The Worst Case: Theorem 8.1Elisangela da SilvaNo ratings yet
- Simpli Ed DES 1: 2.1 Key GenerationDocument3 pagesSimpli Ed DES 1: 2.1 Key GenerationAli hassanNo ratings yet
- Os-Module2 Question BankDocument3 pagesOs-Module2 Question BankDhanyashree BNo ratings yet
- Ethical HarkingDocument18 pagesEthical HarkingMakinde Yung FreemanNo ratings yet
- Engineering Drawing Basic - Sheet Layout, Title Block, NotesDocument16 pagesEngineering Drawing Basic - Sheet Layout, Title Block, Notesgirma tsegayeNo ratings yet
























































































Download as pdf or txt
You might also like
- Service Manual SM-5300: PC Scale Printer Edition 1Document132 pagesService Manual SM-5300: PC Scale Printer Edition 1Kevin ASR100% (2)
- Sistem Kendali Digital - Week 2-1-1Document35 pagesSistem Kendali Digital - Week 2-1-1Dedi BobNo ratings yet
- Schrödinger Equation, Operators, EtcDocument22 pagesSchrödinger Equation, Operators, EtcJMNo ratings yet
- Ch02 WienerFilters Lect 04Document51 pagesCh02 WienerFilters Lect 04DrIhsan Ul HaqNo ratings yet
- Ch02 WienerFiltersLECTURE05Document37 pagesCh02 WienerFiltersLECTURE05DrIhsan Ul HaqNo ratings yet
- Lecture 11 InvertersDocument39 pagesLecture 11 InvertersYsabel PumaNo ratings yet
- Image Restoration PresDocument28 pagesImage Restoration PresbharadwajmahankaliNo ratings yet
- l10 - Data Fusion and Estimation v22Document44 pagesl10 - Data Fusion and Estimation v22Pham Xuan ThuyNo ratings yet
- Optimum ReceiverDocument25 pagesOptimum Receiverはじめ ましてNo ratings yet
- Chapter 3 - Variance Reduction MethodsDocument20 pagesChapter 3 - Variance Reduction MethodsCharbel MerhiNo ratings yet
- T3 - State Variable Models - 2021Document40 pagesT3 - State Variable Models - 2021James ChanNo ratings yet
- Super Regenerative ReceiversDocument21 pagesSuper Regenerative ReceiversAyoub KamalNo ratings yet
- Vibrations ME400Document32 pagesVibrations ME400Nick MezaNo ratings yet
- L4 Random Signals and Noise PDFDocument55 pagesL4 Random Signals and Noise PDFcriscab12345No ratings yet
- ADC Unit 3Document26 pagesADC Unit 3Alok kumarNo ratings yet
- SESM3030 - 01 IntroductionDocument15 pagesSESM3030 - 01 Introductionjiales225No ratings yet
- Week 6 - Important Random Variables and Their DistributionsDocument24 pagesWeek 6 - Important Random Variables and Their DistributionsHaris GhafoorNo ratings yet
- 8 HeteroscedasticityDocument24 pages8 HeteroscedasticityDavid AyalaNo ratings yet
- Pattern Classification 11. Backpropagation & Time-Series ForecastingDocument78 pagesPattern Classification 11. Backpropagation & Time-Series ForecastingMostafa MohamedNo ratings yet
- Diffraction SMITDocument25 pagesDiffraction SMITRNo ratings yet
- 4.1 TransmissionDocument41 pages4.1 TransmissionLIM SHANYOUNo ratings yet
- L11 DC To AC ConveretrsDocument38 pagesL11 DC To AC Converetrsmohamedsamy9878No ratings yet
- 1sensitivity Lecture SlidesDocument59 pages1sensitivity Lecture SlidesKhaled HamdaouiNo ratings yet
- Chapter 4 Linear Estimation of SignalsDocument54 pagesChapter 4 Linear Estimation of SignalstadeleNo ratings yet
- Applied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Quadratic Programs (QP)Document60 pagesApplied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Quadratic Programs (QP)José Manuel Slater CarrascoNo ratings yet
- Pattern Classification 10. Linear Perceptron, Least Squares & Multi-Layer NnsDocument38 pagesPattern Classification 10. Linear Perceptron, Least Squares & Multi-Layer NnsMostafa MohamedNo ratings yet
- RegressionDocument17 pagesRegressionRenhe SONGNo ratings yet
- 2018-12-11 MMC Merlin - ACEPE Summary CourseDocument36 pages2018-12-11 MMC Merlin - ACEPE Summary CourseEfra IbacetaNo ratings yet
- 4.1 - Analysis Based On Transfer FunctionDocument56 pages4.1 - Analysis Based On Transfer FunctionMarceloNo ratings yet
- Stability of Nonlinear SystemsDocument34 pagesStability of Nonlinear SystemsAmgad_A_Salama_239No ratings yet
- Stream CipherDocument17 pagesStream CipherhardisnetworkNo ratings yet
- Variance Reduction TechniquesDocument19 pagesVariance Reduction TechniquesepuenteNo ratings yet
- 9 - Correlation, Energy Spectral Density, and Power Spectral DensityDocument34 pages9 - Correlation, Energy Spectral Density, and Power Spectral DensityChristine AllenNo ratings yet
- RLS PresentationDocument29 pagesRLS PresentationGidey LeulNo ratings yet
- Lecturer 4 Regression AnalysisDocument29 pagesLecturer 4 Regression AnalysisShahzad Khan100% (1)
- Chapter 02Document33 pagesChapter 02Taiyeb Hasan SakibNo ratings yet
- MV FinalDocument64 pagesMV FinaldominiojhtNo ratings yet
- 1.2 Discrete-Time Random Processes: 1.2.1 Sample Spaces and EventsDocument7 pages1.2 Discrete-Time Random Processes: 1.2.1 Sample Spaces and EventsÖmer Faruk DemirNo ratings yet
- 6 Image SegmentationDocument80 pages6 Image SegmentationLingala JayapradaNo ratings yet
- 14.camera CalibrationDocument25 pages14.camera CalibrationUsman MaqboolNo ratings yet
- Module01 ProbabilityAndStatisticsDocument68 pagesModule01 ProbabilityAndStatisticsDevansh GuptaNo ratings yet
- Session 1 Day 4Document26 pagesSession 1 Day 4Guivis ZeufackNo ratings yet
- SS02 LTI System 4Document11 pagesSS02 LTI System 4Miee葉米亞No ratings yet
- Sample Correlation Coefficient: X Value and Is Called The Simple Regression EquationDocument1 pageSample Correlation Coefficient: X Value and Is Called The Simple Regression EquationaaxdhpNo ratings yet
- Applied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Basic Solution Methods For Unconstrained ProblemsDocument68 pagesApplied Numerical Optimization: Prof. Alexander Mitsos, Ph.D. Basic Solution Methods For Unconstrained ProblemsJosé Manuel Slater CarrascoNo ratings yet
- Signals and Systems: DR Tania StathakiDocument20 pagesSignals and Systems: DR Tania StathakikentNo ratings yet
- Cape Applied Mathematics Cheat SheetDocument6 pagesCape Applied Mathematics Cheat SheetNobody JamesNo ratings yet
- Physics Formula HandbookDocument54 pagesPhysics Formula Handbook3198chethaNo ratings yet
- Robot Arm KINEMATICs and DynamicsDocument27 pagesRobot Arm KINEMATICs and DynamicsTirth VyasNo ratings yet
- DSP Sp23 Wk13 230517Document17 pagesDSP Sp23 Wk13 230517Qaiser AbbasNo ratings yet
- Estimation Theory Lec 1 - InTRODUCTIONDocument21 pagesEstimation Theory Lec 1 - InTRODUCTIONMohamed Sayed 201-600-075No ratings yet
- 08 Random Number GenerationDocument28 pages08 Random Number GenerationRupa DnNo ratings yet
- Signaling Over Bandlimited Channels Oct 30 Nov 2 6Document39 pagesSignaling Over Bandlimited Channels Oct 30 Nov 2 6Shravani KodeNo ratings yet
- Signals and Systems: Lecture 13 Wednesday 6 December 2017Document34 pagesSignals and Systems: Lecture 13 Wednesday 6 December 2017aniNo ratings yet
- Lecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFDocument43 pagesLecture - 02 - 03 - Discrete Time Signals - 2.1-2.4 PDFRakhmeen gulNo ratings yet
- Unit 3 Lesson 0 Law of ExponentsDocument12 pagesUnit 3 Lesson 0 Law of ExponentsChristine MeollyNo ratings yet
- Mechanical Vibrations: Why Do We Study ?Document27 pagesMechanical Vibrations: Why Do We Study ?sagar kumarNo ratings yet
- DTEE 212 - Electrical Power IIDocument4 pagesDTEE 212 - Electrical Power IIDrando LawrenceNo ratings yet
- A Customer Needs Layer 2 Switches That Provide Basic FunctionalityDocument15 pagesA Customer Needs Layer 2 Switches That Provide Basic FunctionalityXetraNo ratings yet
- Test Universe v3 10 ClientServer Booklet ENUDocument12 pagesTest Universe v3 10 ClientServer Booklet ENUUdomsak ThanatkhaNo ratings yet
- Laura SchindlerDocument10 pagesLaura SchindlerShasha IkaNo ratings yet
- DVCon Europe 2015 TA1 8 PaperDocument7 pagesDVCon Europe 2015 TA1 8 PaperJon DCNo ratings yet
- IWR 0404 Ed01 TigerTMS IChargeR50.3 OmniPCXEnterpriseR12.4Document56 pagesIWR 0404 Ed01 TigerTMS IChargeR50.3 OmniPCXEnterpriseR12.4Dinusha BandaraNo ratings yet
- Waspmote Lorawan Networking GuideDocument50 pagesWaspmote Lorawan Networking Guideirfan bahadonNo ratings yet
- Bpops 203Document2 pagesBpops 203yoga vNo ratings yet
- Eapp Diagnostic TestDocument4 pagesEapp Diagnostic TestEMzFajardoNo ratings yet
- Programação Ventiladores Nº08-12Document6 pagesProgramação Ventiladores Nº08-12Bruno SacciottiNo ratings yet
- 7 - Module 7 - Networks, Internet and Internet ProtocolDocument37 pages7 - Module 7 - Networks, Internet and Internet ProtocolJoey MetranNo ratings yet
- w4 Wireless Security Camera System ManualDocument17 pagesw4 Wireless Security Camera System ManualMarly SalasNo ratings yet
- Fundamentals of Network Security Assignment 1Document9 pagesFundamentals of Network Security Assignment 1Tate Ngeekepo Kemwiifaneni NdeilukaNo ratings yet
- Multivariate Analysis An OverviewDocument9 pagesMultivariate Analysis An OverviewmerinNo ratings yet
- SENR11930001Document5 pagesSENR11930001Muhammad RamadhanNo ratings yet
- Zenoss Service Dynamics RPS 4.2.5 SP732 Release NotesDocument41 pagesZenoss Service Dynamics RPS 4.2.5 SP732 Release NotesJuliana Barbosa BlancoNo ratings yet
- Dendy Battltanks (260 игр) - список игр в комплектеDocument5 pagesDendy Battltanks (260 игр) - список игр в комплектеoleg sokolovNo ratings yet
- Chapter 6Document5 pagesChapter 6Nermine LimemeNo ratings yet
- 1901 PC Monochrome Monitor Service Manual 314970-01 (1987 Apr)Document22 pages1901 PC Monochrome Monitor Service Manual 314970-01 (1987 Apr)Nicola BonettiNo ratings yet
- OSSEE Guide QuestionsDocument2 pagesOSSEE Guide QuestionsGlyneth Dela TorreNo ratings yet
- PLC Week 10 - Function Block ProgrammingDocument14 pagesPLC Week 10 - Function Block ProgrammingEr Darsh ChahalNo ratings yet
- MBBsavings - 158118 107625 - 2016 12 31Document7 pagesMBBsavings - 158118 107625 - 2016 12 31Zahar ZekNo ratings yet
- Module 4 ADocument29 pagesModule 4 AAKSHITH V SNo ratings yet
- H Bridge: Acc. ISO13850Document5 pagesH Bridge: Acc. ISO13850Mario Alfaro CanoNo ratings yet
- A Lower Bound For The Worst Case: Theorem 8.1Document2 pagesA Lower Bound For The Worst Case: Theorem 8.1Elisangela da SilvaNo ratings yet
- Simpli Ed DES 1: 2.1 Key GenerationDocument3 pagesSimpli Ed DES 1: 2.1 Key GenerationAli hassanNo ratings yet
- Os-Module2 Question BankDocument3 pagesOs-Module2 Question BankDhanyashree BNo ratings yet
- Ethical HarkingDocument18 pagesEthical HarkingMakinde Yung FreemanNo ratings yet
- Engineering Drawing Basic - Sheet Layout, Title Block, NotesDocument16 pagesEngineering Drawing Basic - Sheet Layout, Title Block, Notesgirma tsegayeNo ratings yet