Download as pdf or txt
You might also like
- Modern Control Theory SolutionDocument43 pagesModern Control Theory Solutionengrmishtiaq71% (7)
- PH102 LabDocument10 pagesPH102 LabPeggy CockerNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Week 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Document5 pagesWeek 9 Labview: "Numerical Solution of A Second-Order Linear Ode"Michael LiNo ratings yet
- New Tools For Analysing Power System DynamicsDocument24 pagesNew Tools For Analysing Power System DynamicsmohancrescentNo ratings yet
- Time Series Analysis Exercises: Universität PotsdamDocument30 pagesTime Series Analysis Exercises: Universität PotsdamSD100% (1)
- Phase2 Constitutive Model VerificationDocument36 pagesPhase2 Constitutive Model VerificationMarcos MaNo ratings yet
- Computer Control of ProcessDocument29 pagesComputer Control of ProcessArjun NandyNo ratings yet
- Control System LAB Assignment 03 Fa18-EEE-009 Waris Shah: DATE: 01 April 21Document5 pagesControl System LAB Assignment 03 Fa18-EEE-009 Waris Shah: DATE: 01 April 21Waris ShahNo ratings yet
- Process ControlDocument3 pagesProcess ControlDhina KaranNo ratings yet
- Any Title: A. Partner, B. Partner, and C. Partner August 20, 2021Document4 pagesAny Title: A. Partner, B. Partner, and C. Partner August 20, 2021Pratiksha SinghNo ratings yet
- ErrataDocument9 pagesErrataFranck BanaletNo ratings yet
- Control Systems Unitwise Important Questions Unit 1 Part ADocument10 pagesControl Systems Unitwise Important Questions Unit 1 Part AChandra shekarNo ratings yet
- ControlSystem2 PDFDocument40 pagesControlSystem2 PDFBùi MTriếtNo ratings yet
- Lect Note 1 IntroDocument28 pagesLect Note 1 IntroJie RongNo ratings yet
- First Order and Integrator Dynamical System: Laboratory Experiment No.1Document8 pagesFirst Order and Integrator Dynamical System: Laboratory Experiment No.1Rodrigo TavarezNo ratings yet
- Che374assign5 SolDocument11 pagesChe374assign5 Solgilberto mbulaNo ratings yet
- ACS Experiments 3,4Document5 pagesACS Experiments 3,4Aditya SharmaNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Nonlinear Control Systems 1. - Introduction To Nonlinear SystemsDocument54 pagesNonlinear Control Systems 1. - Introduction To Nonlinear SystemsGech ManNo ratings yet
- DSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Document12 pagesDSP Lab Report 3 Pole Zero Plots and Stability: B Siva Sarath B100558EC A Batch 13 AUG 2013Kasi Kumar KeerthipatiNo ratings yet
- Modeling and Analysis of Dynamic SystemsDocument54 pagesModeling and Analysis of Dynamic SystemsSami SyedNo ratings yet
- Smith 1997Document5 pagesSmith 1997Lucas SantosNo ratings yet
- Unit V M and N CirclesDocument20 pagesUnit V M and N Circleskrushnasamy subramaniyanNo ratings yet
- Delay Differential EquationsDocument25 pagesDelay Differential Equationsbias sufiNo ratings yet
- Adaptive l1 Robust Control For SISO SystemsDocument15 pagesAdaptive l1 Robust Control For SISO SystemshamhmsNo ratings yet
- Inverted PendulumDocument27 pagesInverted Pendulumzaccaro_86No ratings yet
- Statevariable PDFDocument50 pagesStatevariable PDFMohana UMNo ratings yet
- rr322204 Digital and Optimal Control SystemsDocument8 pagesrr322204 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Bouc Wen BenchmarkDocument8 pagesBouc Wen BenchmarkZ WNo ratings yet
- Assignment 1 MCTE 3313 Sem 1 2018 2019Document3 pagesAssignment 1 MCTE 3313 Sem 1 2018 2019Nurmi Elisya RosliNo ratings yet
- Chapter 8Document22 pagesChapter 8Michael Zontche BernardNo ratings yet
- Rr411005 Digital Control SystemsDocument8 pagesRr411005 Digital Control SystemsSrinivasa Rao GNo ratings yet
- Singular Perturbation An OverviewDocument46 pagesSingular Perturbation An OverviewBorislav BrnjadaNo ratings yet
- Ph3 Chapter ThemechanicaloscillatorDocument17 pagesPh3 Chapter ThemechanicaloscillatorscrewyouregNo ratings yet
- Control Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Document184 pagesControl Theory, Tsrt09, TSRT06 Exercises & Solutions: 23 Mars 2021Adel AdenaneNo ratings yet
- Automatic Control III Homework Assignment 3 2015Document4 pagesAutomatic Control III Homework Assignment 3 2015salimNo ratings yet
- Model Identification and Controller DesignDocument6 pagesModel Identification and Controller DesignMichaelNo ratings yet
- Signals and System - Stanley ChanDocument105 pagesSignals and System - Stanley ChanEEM Ders Notları50% (2)
- Control Systems Theory and Design: ExaminationDocument6 pagesControl Systems Theory and Design: ExaminationLuis CarvalhoNo ratings yet
- Dynamic Sliding Mode Control Scheme For Electro-HyDocument5 pagesDynamic Sliding Mode Control Scheme For Electro-Hyadssf fdgddNo ratings yet
- R7411008-Digital Control SystemsDocument4 pagesR7411008-Digital Control SystemssivabharathamurthyNo ratings yet
- (A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Document4 pages(A) (B) (C) (D) : Structural Dynamics (CEI SD-100)Sahar Aktham RashedNo ratings yet
- Effect of Exhaust Grille Position On Air Quality and Flow Patterns in Clean RoomsDocument10 pagesEffect of Exhaust Grille Position On Air Quality and Flow Patterns in Clean Roomshesham metwallyNo ratings yet
- ELG2138 Lab Manual 3Document5 pagesELG2138 Lab Manual 3Mat MorashNo ratings yet
- Inno2018 Emt2502 Vibrations Free Vibration SdofDocument15 pagesInno2018 Emt2502 Vibrations Free Vibration SdofinnoodiraNo ratings yet
- Draft UAS DINAMIKA SISTEM 2022Document6 pagesDraft UAS DINAMIKA SISTEM 2022skiperkresNo ratings yet
- My Thirds em ReportDocument21 pagesMy Thirds em ReportMassDuttNo ratings yet
- Control 290922 ExamDocument2 pagesControl 290922 ExamOlaniran Matthew OlawaleNo ratings yet
- MDPN471 Omar MohsenDocument11 pagesMDPN471 Omar MohsenOmaroMohsenNo ratings yet
- Transfer Function PDFDocument1 pageTransfer Function PDFYahya Abdul Razek Yahya Abdul RazekNo ratings yet
- 60 Deg AirDocument14 pages60 Deg AirAbinesh AbineshNo ratings yet
- Department of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemDocument7 pagesDepartment of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemZhraa NorNo ratings yet
- LecturenoteDocument68 pagesLecturenoteTalha Naeem RaoNo ratings yet
- Department of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemDocument7 pagesDepartment of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemZhraa NorNo ratings yet
- Department of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemDocument7 pagesDepartment of Electrical and Computer Engineering ECED4601 Digital Control System Lab 4 Design of Discrete Time Control SystemZhraa NorNo ratings yet
- HET312 NotesDocument41 pagesHET312 NotesTing SamuelNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- A Hardware-Oriented Echo State Network and Its FPGA ImplementationDocument5 pagesA Hardware-Oriented Echo State Network and Its FPGA ImplementationGeraud Russel Goune ChenguiNo ratings yet
- Real-Time Echo State Network Based On FPGA and Its ApplicationsDocument13 pagesReal-Time Echo State Network Based On FPGA and Its ApplicationsGeraud Russel Goune ChenguiNo ratings yet
- Efficient Design of Hardware-Enabled Reservoir Computing in FpgasDocument10 pagesEfficient Design of Hardware-Enabled Reservoir Computing in FpgasGeraud Russel Goune ChenguiNo ratings yet
- Simple Hardware Implementation of Neural Networks For Instruction in Analog ElectronicsDocument12 pagesSimple Hardware Implementation of Neural Networks For Instruction in Analog ElectronicsGeraud Russel Goune ChenguiNo ratings yet
- FPGA-based System For Artificial Neural Network Arrhythmia ClassificationDocument16 pagesFPGA-based System For Artificial Neural Network Arrhythmia ClassificationGeraud Russel Goune ChenguiNo ratings yet
- Online Training of An Opto-Electronic Reservoir Computer Applied To Real-Time Channel EqualizationDocument14 pagesOnline Training of An Opto-Electronic Reservoir Computer Applied To Real-Time Channel EqualizationGeraud Russel Goune ChenguiNo ratings yet
- ANGE - Automatic Neural Generator: June 2011Document9 pagesANGE - Automatic Neural Generator: June 2011Geraud Russel Goune ChenguiNo ratings yet
- Input-Output Analysis of Decentralized Relay Systems: Proceedings of The American Control Conference January 2004Document7 pagesInput-Output Analysis of Decentralized Relay Systems: Proceedings of The American Control Conference January 2004Geraud Russel Goune ChenguiNo ratings yet
- Antonik 2015 FpgaDocument8 pagesAntonik 2015 FpgaGeraud Russel Goune ChenguiNo ratings yet
- Limit Cycles With Chattering in Relay Feedback SysDocument14 pagesLimit Cycles With Chattering in Relay Feedback SysGeraud Russel Goune ChenguiNo ratings yet
- 10.1007@s00034 020 01521 8Document28 pages10.1007@s00034 020 01521 8Geraud Russel Goune ChenguiNo ratings yet
- Sieber, J. (2006) - Dynamics of Delayed Relay Systems.: University of Bristol - Explore Bristol ResearchDocument42 pagesSieber, J. (2006) - Dynamics of Delayed Relay Systems.: University of Bristol - Explore Bristol ResearchGeraud Russel Goune ChenguiNo ratings yet
- Chaotic Oscillations in Delayed-Feedback Electronic OscillatorsDocument5 pagesChaotic Oscillations in Delayed-Feedback Electronic OscillatorsGeraud Russel Goune ChenguiNo ratings yet
- Simple Nonlinear Circuits and Applications To Chaotic Sensors and Chaos GeneratorsDocument4 pagesSimple Nonlinear Circuits and Applications To Chaotic Sensors and Chaos GeneratorsGeraud Russel Goune ChenguiNo ratings yet
- The Echo State Approach To Analysing and TrainingDocument47 pagesThe Echo State Approach To Analysing and TrainingGeraud Russel Goune ChenguiNo ratings yet
- Asymptotic Solution of The Van Der Pol Oscillator With Small Fractional DampingDocument4 pagesAsymptotic Solution of The Van Der Pol Oscillator With Small Fractional DampingGeraud Russel Goune ChenguiNo ratings yet
- Van Der Pol'S Oscillator Under Delayed FeedbackDocument7 pagesVan Der Pol'S Oscillator Under Delayed FeedbackGeraud Russel Goune ChenguiNo ratings yet
- Sample Title: With Forced LinebreakDocument6 pagesSample Title: With Forced LinebreakGeraud Russel Goune ChenguiNo ratings yet
- Of Attractors Forced To To Chaotic: Evolution Quasiperiodically Systems: From Quasiperiodic Strange NonchaoticDocument6 pagesOf Attractors Forced To To Chaotic: Evolution Quasiperiodically Systems: From Quasiperiodic Strange NonchaoticGeraud Russel Goune ChenguiNo ratings yet
- Optoelectronic Reservoir Computing: Scientific ReportsDocument6 pagesOptoelectronic Reservoir Computing: Scientific ReportsGeraud Russel Goune ChenguiNo ratings yet
- Marquez2016 PDFDocument6 pagesMarquez2016 PDFGeraud Russel Goune ChenguiNo ratings yet
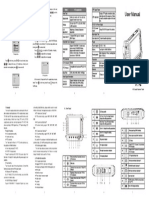
- 58MM Thermal Reciept Printer Operating Manual-20170214 PDFDocument14 pages58MM Thermal Reciept Printer Operating Manual-20170214 PDFblackozz01No ratings yet
- ABB UPS Brochure Overview enDocument4 pagesABB UPS Brochure Overview enMuhammad Irfan KhanNo ratings yet
- How To Charge A Lead-Acid Battery With A Li-Ion Charger: Application ReportDocument9 pagesHow To Charge A Lead-Acid Battery With A Li-Ion Charger: Application ReportnarakribNo ratings yet
- Ficha Ténica Software Balanceo Bently NevadaDocument5 pagesFicha Ténica Software Balanceo Bently NevadaCAGERIGONo ratings yet
- SAP Setup GuideDocument100 pagesSAP Setup GuidePornpimon SuwannawongNo ratings yet
- IGCT TrainingDocument57 pagesIGCT TrainingVivek KumarNo ratings yet
- ICVS2013 - Opencv For IOSDocument38 pagesICVS2013 - Opencv For IOSPhan HaNo ratings yet
- IV8WTESTDocument2 pagesIV8WTESTAbraham Lopez G.No ratings yet
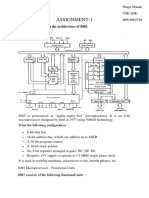
- MPMC Assignment-1Document7 pagesMPMC Assignment-113Panya CSE2No ratings yet
- CRNQ, CRND - Instruction Manual (Detailed Explanations) BFP-A8661-AE (02.15) PDFDocument544 pagesCRNQ, CRND - Instruction Manual (Detailed Explanations) BFP-A8661-AE (02.15) PDFpauloNo ratings yet
- How To Hack Using QR Codes - Hacker AcademyDocument13 pagesHow To Hack Using QR Codes - Hacker AcademyElfawizzyNo ratings yet
- Ims HSSRDocument642 pagesIms HSSRJOE SCHOLTZNo ratings yet
- B CSR1000v Configuration GuideDocument304 pagesB CSR1000v Configuration GuideCatalin PraporgescuNo ratings yet
- Materi Sesi 3 - Cloud Technology As A Digital Forensics Challenge (Eka Sutresna)Document35 pagesMateri Sesi 3 - Cloud Technology As A Digital Forensics Challenge (Eka Sutresna)merah beraniNo ratings yet
- SD Approval Reff Data With Detail by CheckerDocument10 pagesSD Approval Reff Data With Detail by CheckerOpik TamaNo ratings yet
- Unit 5Document49 pagesUnit 5snehalNo ratings yet
- The Essential Software RequirementDocument20 pagesThe Essential Software RequirementFARRUKH QAMARNo ratings yet
- 01 Intro To Course DSADocument35 pages01 Intro To Course DSAHaseeb MuhammadNo ratings yet
- Aws-Solutions-Architect - Template 10Document1 pageAws-Solutions-Architect - Template 10Shawn ShawNo ratings yet
- Carestreamndt hpxdr2530PH US Nonglass Glass Sell Sheet 7200700 202104 LTR Lores enDocument2 pagesCarestreamndt hpxdr2530PH US Nonglass Glass Sell Sheet 7200700 202104 LTR Lores en廖建榮No ratings yet
- Laptop ShemaDocument102 pagesLaptop Shemamustapma100% (2)
- Av002 - Cable Schedules-Av002Document1 pageAv002 - Cable Schedules-Av002Mary Sharlene IjanNo ratings yet
- Beee PPT - 1Document12 pagesBeee PPT - 1Girish Shankar MishraNo ratings yet
- Datasheet PDFDocument16 pagesDatasheet PDFMarco Pilaguano LogañaNo ratings yet
- RF and Mic - WebsiteDocument9 pagesRF and Mic - WebsiteRajesh NatarajanNo ratings yet
- Assembly Language 8086 Exercise Solution (Marut) PDFDocument58 pagesAssembly Language 8086 Exercise Solution (Marut) PDFShaibal Ahmed60% (10)
- T3TAFJ2-Workshop-Install A TAFJ Standalone-R16Document9 pagesT3TAFJ2-Workshop-Install A TAFJ Standalone-R16suchi vedhaNo ratings yet
- Clarus600GC IPM N5156089aDocument22 pagesClarus600GC IPM N5156089ajluisreino3386100% (1)
- SinatraDocument29 pagesSinatraSamNo ratings yet
- Silicon NPN Triple Diffusion Planar Type Darlington: Power TransistorsDocument3 pagesSilicon NPN Triple Diffusion Planar Type Darlington: Power Transistorsluis.sinatoNo ratings yet