Download as pdf or txt
You might also like
- HYDRAULIC CIRCUIT ORIENTATION J-1175 & I-1312 Advanced - REV1 - PPT (Read-Only)Document44 pagesHYDRAULIC CIRCUIT ORIENTATION J-1175 & I-1312 Advanced - REV1 - PPT (Read-Only)Stelian Crisan100% (5)
- Agile Cheat SheetDocument1 pageAgile Cheat SheetLee Spadini100% (6)
- Lab2 1+2 2-NhânDocument7 pagesLab2 1+2 2-NhânNhan Nguyen van MinhNo ratings yet
- Virtual Lab Report-1 PDFDocument27 pagesVirtual Lab Report-1 PDFCarlton Lobo0% (1)
- 571 Quick ReferanceDocument3 pages571 Quick ReferanceirfanlarikhotmailcomNo ratings yet
- Catalog YD13Document60 pagesCatalog YD13Игорь Александрович71% (7)
- ME2143 Part I TutorialProbemSet 1Document3 pagesME2143 Part I TutorialProbemSet 1Zheng YongjiaNo ratings yet
- Circuit Analysis and Design Manual FinalDocument65 pagesCircuit Analysis and Design Manual Finalصدام حسینNo ratings yet
- NT Lab MannualDocument31 pagesNT Lab MannualsagarNo ratings yet
- Lec7 FirstOrder 02 PDFDocument59 pagesLec7 FirstOrder 02 PDFPhan Phuong NgocNo ratings yet
- Sinusoidal Response of Series Circuits - GATE Study Material in PDFDocument11 pagesSinusoidal Response of Series Circuits - GATE Study Material in PDFSupriya Santre100% (1)
- Pee Lab ManualDocument77 pagesPee Lab ManualRajendraTuraka100% (1)
- Bee Lab ManualDocument62 pagesBee Lab ManualSwetha VanamNo ratings yet
- Bee Lab ManualDocument60 pagesBee Lab Manualravi828No ratings yet
- 120EI0884 - SamyakHinge CSL Lab RecordDocument51 pages120EI0884 - SamyakHinge CSL Lab Recordpappu singhNo ratings yet
- EEE - VIT Chennai - Lab Report - Sam Prince Franklin - 20MIS1115Document63 pagesEEE - VIT Chennai - Lab Report - Sam Prince Franklin - 20MIS1115SamNo ratings yet
- Dept. of Electronics and Communication Engineering: Sem / Year: Ii / IDocument41 pagesDept. of Electronics and Communication Engineering: Sem / Year: Ii / Ivalan_carl07No ratings yet
- ENA ManualDocument60 pagesENA ManualAbdul Munim100% (1)
- A. Basic ConceptsDocument40 pagesA. Basic ConceptsBarkley VelezNo ratings yet
- Lecture 04Document15 pagesLecture 04Roy Jonathan Adorna AvilaNo ratings yet
- EE-221-Review of DC CircuitsDocument51 pagesEE-221-Review of DC CircuitsSean Ng100% (1)
- Network Theory Question BankDocument14 pagesNetwork Theory Question BankHarishReddyNo ratings yet
- BEE New Important QuestionsDocument9 pagesBEE New Important Questionsaraq3501No ratings yet
- Electrical Systems (System Dynamics)Document4 pagesElectrical Systems (System Dynamics)hamooodiiiNo ratings yet
- Lab 06 RC, RL, and RLC Transients-2Document11 pagesLab 06 RC, RL, and RLC Transients-2Ece KayaNo ratings yet
- Question of EE ProjectDocument5 pagesQuestion of EE ProjectANJALI KUMARINo ratings yet
- Edc (PQ)Document28 pagesEdc (PQ)Utsav PoudelNo ratings yet
- Analyze An RLC Circuit Using Laplace Methods - Dummies - 1589011872183Document5 pagesAnalyze An RLC Circuit Using Laplace Methods - Dummies - 1589011872183Tchouala DentrishNo ratings yet
- Basic Electrical Engineering Lab ManualDocument44 pagesBasic Electrical Engineering Lab Manualdinuarslan86% (7)
- RC and RL Circuits - FRDocument23 pagesRC and RL Circuits - FRIshtiyaq RafiqiNo ratings yet
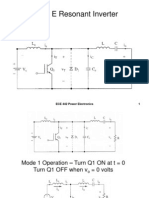
- Class E Resonant InverterDocument28 pagesClass E Resonant InverterSenthil Kumar0% (1)
- QUESTION BANK Basic Electrical EngineeringDocument7 pagesQUESTION BANK Basic Electrical EngineeringChirag ShakyaNo ratings yet
- Basic Electrical EngineeringDocument37 pagesBasic Electrical EngineeringCharles SandersNo ratings yet
- Circuit AnalysisDocument144 pagesCircuit AnalysiseXalife100% (1)
- Open&&short Circuit TestDocument8 pagesOpen&&short Circuit Testمعتصم الكاملNo ratings yet
- R-L RC Circuit ProjectDocument14 pagesR-L RC Circuit Projectnirakarrath04No ratings yet
- ECI - UNIT 1 MarkDocument5 pagesECI - UNIT 1 MarkSukesh RNo ratings yet
- Enginering AnalysisDocument11 pagesEnginering Analysisamr3repy4No ratings yet
- Electrical Technology 08082016Document46 pagesElectrical Technology 08082016AkNo ratings yet
- Electrical Energy Generation Electrical Energy GenerationDocument10 pagesElectrical Energy Generation Electrical Energy GenerationKadhane NavnathNo ratings yet
- Mit Aec Labmanula 10esl37Document45 pagesMit Aec Labmanula 10esl37anon_70724250No ratings yet
- ECE 307 - Lecture 7 Superposition, Maximum Power Transfer, and Dependent SourcesDocument35 pagesECE 307 - Lecture 7 Superposition, Maximum Power Transfer, and Dependent Sourcesits_crussellNo ratings yet
- RC and RL CircuitsDocument17 pagesRC and RL CircuitsManjot KaurNo ratings yet
- First Set PDF 2018-19 PDFDocument22 pagesFirst Set PDF 2018-19 PDFLavankumar MudirajNo ratings yet
- Electric Circuit and Electronics NoteDocument34 pagesElectric Circuit and Electronics NoteEzekiel JamesNo ratings yet
- Ee287 CH 1 2Document30 pagesEe287 CH 1 2samuel fiifi yeboahNo ratings yet
- NA Lab ManualDocument38 pagesNA Lab ManualWASEEM_AKHTER100% (2)
- PHM604 QB 2019 PDFDocument5 pagesPHM604 QB 2019 PDFAbhishek Yadav100% (1)
- Iec Exp 8Document9 pagesIec Exp 8mursalinleon2295No ratings yet
- CH 3 SlideDocument33 pagesCH 3 SlideDenis EmilioNo ratings yet
- Pe Course File 9 198Document190 pagesPe Course File 9 198Dr ADITYA VORANo ratings yet
- Class 03Document76 pagesClass 03miguel angel camargo chevelNo ratings yet
- Multiple Choice Questions: Evaluation BookDocument6 pagesMultiple Choice Questions: Evaluation BookAdel KhamisNo ratings yet
- Ee2001 (Week3 Week6 Wcy)Document177 pagesEe2001 (Week3 Week6 Wcy)Giang Nguyễn TrườngNo ratings yet
- EE Important QuestionsDocument6 pagesEE Important QuestionsLE-1 BhargaviNo ratings yet
- Lecture Notes Week12Document30 pagesLecture Notes Week12tamer.eksioglu2019328No ratings yet
- Circuits and NetworksDocument23 pagesCircuits and NetworksDei PehNo ratings yet
- Exp 4Document7 pagesExp 4mohmmad othmanNo ratings yet
- Network Analysis ECE Question Bank 4,5,6Document5 pagesNetwork Analysis ECE Question Bank 4,5,6RajeshKanchanaNo ratings yet
- Transient in RC and RL CircuitsDocument10 pagesTransient in RC and RL CircuitsHenok BelaynehNo ratings yet
- Question Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2Document9 pagesQuestion Bank of Network Analysis and Synthesis UNIT-1 and UNIT-2PrakharGupta100% (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Datasheet RHI-3P (5-10) K-HVES-5G Global V2.7 2023 06Document2 pagesDatasheet RHI-3P (5-10) K-HVES-5G Global V2.7 2023 06Noor Ul QamarNo ratings yet
- Letter of Recommendation: To Be Filled by The ApplicantDocument2 pagesLetter of Recommendation: To Be Filled by The ApplicantNoor Ul QamarNo ratings yet
- GC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationDocument2 pagesGC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationNoor Ul QamarNo ratings yet
- University of Management and Technology: Approved Curriculum of MS Electrical Engineering ProgramDocument26 pagesUniversity of Management and Technology: Approved Curriculum of MS Electrical Engineering ProgramNoor Ul QamarNo ratings yet
- GC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationDocument2 pagesGC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationNoor Ul QamarNo ratings yet
- GC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationDocument2 pagesGC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationNoor Ul QamarNo ratings yet
- GC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationDocument2 pagesGC University Lahore: First Merit List of Candidates For Interview and Original Documents VerificationNoor Ul QamarNo ratings yet
- Noor Ul QamarDocument2 pagesNoor Ul QamarNoor Ul QamarNo ratings yet
- GC University Lahore: List of The Candidates Eligible For Interview (Kinship)Document5 pagesGC University Lahore: List of The Candidates Eligible For Interview (Kinship)Noor Ul QamarNo ratings yet
- GC University Lahore: List of The Candidates Eligible For Interview (Kinship)Document4 pagesGC University Lahore: List of The Candidates Eligible For Interview (Kinship)Noor Ul QamarNo ratings yet
- Department of Electrical Engineering Project Lab University of Engineering and Technology, LahoreDocument1 pageDepartment of Electrical Engineering Project Lab University of Engineering and Technology, LahoreNoor Ul QamarNo ratings yet
- GC University Lahore: Deferred/Third Merit List of Candidates For Interview and Original Documents VerificationDocument1 pageGC University Lahore: Deferred/Third Merit List of Candidates For Interview and Original Documents VerificationNoor Ul QamarNo ratings yet
- 74VHC245FT Datasheet en 20170222Document9 pages74VHC245FT Datasheet en 20170222rfidguysNo ratings yet
- ZF Transmission Oil Lubrication GuideDocument14 pagesZF Transmission Oil Lubrication GuidePrudz100% (1)
- Dissertation Utopie Contre UtopieDocument6 pagesDissertation Utopie Contre UtopieBuyACollegePaperOnlineBillings100% (1)
- Test of English As A Foreign Language: BulletinDocument28 pagesTest of English As A Foreign Language: BulletinDaniel CastroNo ratings yet
- White Minimalist ResumeDocument1 pageWhite Minimalist ResumebabucpyNo ratings yet
- A Study of Communication Barriers in Open Distance Learning System of EducationDocument15 pagesA Study of Communication Barriers in Open Distance Learning System of EducationRyn EscañoNo ratings yet
- 【営業図】FDV M09W・M12W 1 - ENDocument1 page【営業図】FDV M09W・M12W 1 - ENrizky aulia rahmanNo ratings yet
- Pay ShieldDocument2 pagesPay ShieldsdadsdNo ratings yet
- AUD MAN Via User - Guide v2.4Document66 pagesAUD MAN Via User - Guide v2.4Escritorio RemotoNo ratings yet
- It Optimize IT Change Management Phases 1 4 R4Document138 pagesIt Optimize IT Change Management Phases 1 4 R4Mohammad YasirNo ratings yet
- Summative Assessment For The Term2 Characteristic of Tasks For Summative Assessment For The 4 TermDocument14 pagesSummative Assessment For The Term2 Characteristic of Tasks For Summative Assessment For The 4 TermaizokoshaNo ratings yet
- Importing Bank Data - S4HANADocument6 pagesImporting Bank Data - S4HANAsrinathusjNo ratings yet
- Moon Alphabet: OriginDocument2 pagesMoon Alphabet: Originmujib uddin siddiquiNo ratings yet
- Virtual RealityDocument22 pagesVirtual RealityRavikantNo ratings yet
- IoT ArchitectureDocument4 pagesIoT ArchitectureJaafar OmarNo ratings yet
- Stair Master 620-8762A - 10G Owner ManualDocument28 pagesStair Master 620-8762A - 10G Owner Manualhg nNo ratings yet
- HPCL - GEC - C - EL - 014 - Rev.0B - ELECTRICAL SOQDocument10 pagesHPCL - GEC - C - EL - 014 - Rev.0B - ELECTRICAL SOQbecpavanNo ratings yet
- Ch1 Information Systems in Global BusinessDocument39 pagesCh1 Information Systems in Global BusinessSarahNo ratings yet
- International Scientific Report On AI SafetyDocument132 pagesInternational Scientific Report On AI SafetylepakshiNo ratings yet
- QUIZ Maze For PO 2Document15 pagesQUIZ Maze For PO 2Sachin JangidNo ratings yet
- Spring Boot整合Spring SecurityDocument5 pagesSpring Boot整合Spring SecurityChiNo ratings yet
- October 2 Licensure ExamDocument25 pagesOctober 2 Licensure ExamPhetter Leo CajegasNo ratings yet
- SiUS121602E Service ManualDocument222 pagesSiUS121602E Service ManualpqcrackerNo ratings yet
- Dr. Reddy'S Laboratories LimitedDocument36 pagesDr. Reddy'S Laboratories LimitedJagadesh PNo ratings yet
- Trombone SupDocument5 pagesTrombone SupRoger BarriaNo ratings yet
- Audi A4, A5, Q5 Drive Select (Englisch)Document9 pagesAudi A4, A5, Q5 Drive Select (Englisch)Christian CrisNo ratings yet