Download as pdf or txt
You might also like
- Electronic Ignition SystemDocument13 pagesElectronic Ignition SystemRahul Rai100% (8)
- Flow Control of Fluid in Pipelines Using PID Controller: IEEE Access February 2019Document9 pagesFlow Control of Fluid in Pipelines Using PID Controller: IEEE Access February 2019Larissa Sousa de AndradeNo ratings yet
- Flow Control of Fluid in Pipelines Using PID ControllerDocument8 pagesFlow Control of Fluid in Pipelines Using PID ControllerLuis Alberto Toalombo ToapaxiNo ratings yet
- MfoubmoulouYohan MRAC2021 PDFDocument20 pagesMfoubmoulouYohan MRAC2021 PDFOumayNo ratings yet
- Algorithms 16 00035 With CoverDocument3 pagesAlgorithms 16 00035 With CoverKAMELNo ratings yet
- Algorithms 16 00035 v2Document2 pagesAlgorithms 16 00035 v2KAMELNo ratings yet
- Analytical Tuning Method For Cascade Control System Via Multi-Scale Control SchemeDocument26 pagesAnalytical Tuning Method For Cascade Control System Via Multi-Scale Control SchemeFelipe BravoNo ratings yet
- Comparitive Study of Fopi and FopidDocument18 pagesComparitive Study of Fopi and FopidrajanNo ratings yet
- Real-Time Performance Evaluation of A Fuzzy PI + Fuzzy PD Controller For Liquid-Level ProcessDocument12 pagesReal-Time Performance Evaluation of A Fuzzy PI + Fuzzy PD Controller For Liquid-Level ProcessVikasNehraNo ratings yet
- Design of An IMCPID Optimized Neural Network For SDocument19 pagesDesign of An IMCPID Optimized Neural Network For SGlan DevadhasNo ratings yet
- Analytical Robust Tuning Approach For Two-Degree-oDocument12 pagesAnalytical Robust Tuning Approach For Two-Degree-oDeepranjan DongolNo ratings yet
- IJFS2020Document18 pagesIJFS2020Adriano Nogueira DrumondNo ratings yet
- Advanced Methods of PID Controller Tuning For Specified PerformanceDocument48 pagesAdvanced Methods of PID Controller Tuning For Specified Performance賴明宏No ratings yet
- Fuzzy Gain Scheduled Pi Controller For ADocument5 pagesFuzzy Gain Scheduled Pi Controller For AOumayNo ratings yet
- 07 Chapter 2Document23 pages07 Chapter 2Anonymous 2vaaNbDvNo ratings yet
- Processes 09 00735Document17 pagesProcesses 09 00735Ferry DewantoNo ratings yet
- PMhaskar NHEl-Farra PDChristofides AIChEJ 2005 51 Method Classical Controller TuningDocument8 pagesPMhaskar NHEl-Farra PDChristofides AIChEJ 2005 51 Method Classical Controller TuningjamesNo ratings yet
- Design and Implementation of Industrial Internet of Things (Iiot) Framework For Nonlinear Actuator Health Monitoring and CompensationDocument20 pagesDesign and Implementation of Industrial Internet of Things (Iiot) Framework For Nonlinear Actuator Health Monitoring and CompensationAkhilesh Kumar MishraNo ratings yet
- جدا مهمDocument8 pagesجدا مهمMustafa AlhumayreNo ratings yet
- Stabilization of Liquid Level in A Tank System Based On Fuzzy Logic ControllerDocument9 pagesStabilization of Liquid Level in A Tank System Based On Fuzzy Logic ControllerIAES International Journal of Robotics and AutomationNo ratings yet
- Development and Experimental Assessment of A Fluid Flow Monitoring System Using Flow Sensor and Arduino InterfaceDocument9 pagesDevelopment and Experimental Assessment of A Fluid Flow Monitoring System Using Flow Sensor and Arduino InterfaceAnamNo ratings yet
- PSO Optimized PID Controller Design For The Process Liquid Level ControlDocument5 pagesPSO Optimized PID Controller Design For The Process Liquid Level ControlgadaNo ratings yet
- Ramirez Sira Garrido Luviano SICEAnnual Conference 2015Document7 pagesRamirez Sira Garrido Luviano SICEAnnual Conference 2015Pham Phuong NamNo ratings yet
- Modeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisDocument7 pagesModeling and Control of A Rotary Inverted Pendulum Using Various Methods, Comparative Assessment and Result AnalysisFawaz PartoNo ratings yet
- Online Monitoring and Control of Flow Rate in Oil Pipelines TransportationDocument8 pagesOnline Monitoring and Control of Flow Rate in Oil Pipelines TransportationCeeta IndustriesNo ratings yet
- Processes 09 01538 v2Document14 pagesProcesses 09 01538 v2camilo.gonzalez.pozoNo ratings yet
- Thesis ChengCheng PDFDocument223 pagesThesis ChengCheng PDFsema tekinNo ratings yet
- $1Hxudo3Uhglfwlrq0Rghoiru0Rqlwrulqjdqg) Dxow'Ldjqrvlvri D3Odvwlf, Qmhfwlrq0Rxoglqj3UrfhvvDocument5 pages$1Hxudo3Uhglfwlrq0Rghoiru0Rqlwrulqjdqg) Dxow'Ldjqrvlvri D3Odvwlf, Qmhfwlrq0Rxoglqj3UrfhvvFoued THiNo ratings yet
- Pid Tuning For Multi-Channel Structural Fatigue Testing SystemDocument11 pagesPid Tuning For Multi-Channel Structural Fatigue Testing SystemSomayya AmmanagiNo ratings yet
- 5 Papers - CompressedDocument75 pages5 Papers - Compressedkarthikchandran1986No ratings yet
- Jurnal PIDDocument6 pagesJurnal PIDHafidz Asy'ari AkbarNo ratings yet
- Construction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemDocument7 pagesConstruction and Analysis of PID, Fuzzy and Predictive Controllers in Flow SystemLuigi FreireNo ratings yet
- Damour Et Al-2014-Fuel Cells PDFDocument8 pagesDamour Et Al-2014-Fuel Cells PDFDavid Mas LopezNo ratings yet
- Ijest10 02 10 182 PDFDocument7 pagesIjest10 02 10 182 PDFGlan DevadhasNo ratings yet
- Multivariable PID Tuning of Dynamic Ship Positioning Control SystemsDocument15 pagesMultivariable PID Tuning of Dynamic Ship Positioning Control Systemsrishabh.november10No ratings yet
- (Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemDocument6 pages(Ok) Comparative Study of PID Controlled Modes On Automatic Water Level Measurement SystemPHONG LÊ BÁNo ratings yet
- ISA Transactions: Saurabh Srivastava, Anuraag Misra, S.K. Thakur, V.S. PanditDocument10 pagesISA Transactions: Saurabh Srivastava, Anuraag Misra, S.K. Thakur, V.S. PanditvictorNo ratings yet
- Control PidDocument3 pagesControl PidfraicheNo ratings yet
- PDFDocument49 pagesPDFTITANIUM ALFREDONo ratings yet
- Dynamic Modeling and Simulation of Control System For Pneumatic Servo Valve Using Piezoelectric ActuatorDocument10 pagesDynamic Modeling and Simulation of Control System For Pneumatic Servo Valve Using Piezoelectric Actuatorkyaw san ooNo ratings yet
- Adaptive Proportional-Integral Controller Using OL PDFDocument11 pagesAdaptive Proportional-Integral Controller Using OL PDFLuis MiguelNo ratings yet
- Optimal Temperature and Humidity Control For AutonDocument13 pagesOptimal Temperature and Humidity Control For AutonAhmad Atsari SujudNo ratings yet
- PI and PID Controller Tuning Rules - Overview & Personal Perspective - O'DwyerDocument6 pagesPI and PID Controller Tuning Rules - Overview & Personal Perspective - O'DwyerMichaelNo ratings yet
- A Frequency Domain PID Controller Design Method Using Direct Synthesis ApproachDocument11 pagesA Frequency Domain PID Controller Design Method Using Direct Synthesis ApproachTrần Kế HưngNo ratings yet
- Water Level Control SytemDocument3 pagesWater Level Control SytemKaung Thant MinnNo ratings yet
- 147 337 1 SM PDFDocument22 pages147 337 1 SM PDFFitria IdrusNo ratings yet
- 1 s2.0 S0360544216314931 MainDocument14 pages1 s2.0 S0360544216314931 MaindarkNo ratings yet
- A Comparative Study of Conventional Pid and Fuzzy-Pid For DC Motor Speed ControlDocument17 pagesA Comparative Study of Conventional Pid and Fuzzy-Pid For DC Motor Speed ControlLarissa Sousa de AndradeNo ratings yet
- Design and Implementation of PID Controller in ProDocument6 pagesDesign and Implementation of PID Controller in ProBAGAS ADIYATMA Mahasiswa PNJNo ratings yet
- Real TimeDocument18 pagesReal Timeknisa amrNo ratings yet
- Various Methods Are Used To Improve The Capacity and Performance of Solar and Wind Power Systems A ReviewDocument6 pagesVarious Methods Are Used To Improve The Capacity and Performance of Solar and Wind Power Systems A ReviewEditor IJTSRDNo ratings yet
- Speed Control of DC Motor Using Particle Swarm OptDocument9 pagesSpeed Control of DC Motor Using Particle Swarm OptThien MaiNo ratings yet
- 22mo03 ACDocument17 pages22mo03 AC22MO01 - MOHANA PRIYA BNo ratings yet
- 10 PIDControlKnospeDocument3 pages10 PIDControlKnospeWarren Dhez FortunatoNo ratings yet
- Development of A Sucker Rod Pumping Unit Simulation ModelDocument7 pagesDevelopment of A Sucker Rod Pumping Unit Simulation ModelashipulinNo ratings yet
- Anti-Disturbance Composite Tracking Control For A Coupled Two-Tank MIMO Process With Experimental StudiesDocument14 pagesAnti-Disturbance Composite Tracking Control For A Coupled Two-Tank MIMO Process With Experimental StudiesKha BùiNo ratings yet
- Tratamiento de AguaDocument8 pagesTratamiento de AguaAlejandra peña duarteNo ratings yet
- Modeling of Micro-Hydro Power Plant and Its Control Based On Neural NetworkDocument5 pagesModeling of Micro-Hydro Power Plant and Its Control Based On Neural NetworkTio SNo ratings yet
- CFD Analysis of Phenomena Attributed To Pigging Run in A Straight PipelineDocument10 pagesCFD Analysis of Phenomena Attributed To Pigging Run in A Straight PipelineHarshad ChavanNo ratings yet
- Analysis of Different Controllers Used For Boiler Drum Level Control by Using LabVIEW SimulationDocument5 pagesAnalysis of Different Controllers Used For Boiler Drum Level Control by Using LabVIEW SimulationEditor IJTSRDNo ratings yet
- Digital Instrumentation and Control Systems for New and Existing Research ReactorsFrom EverandDigital Instrumentation and Control Systems for New and Existing Research ReactorsNo ratings yet
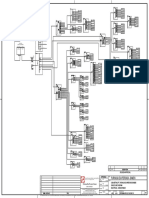
- Pepbwn 001 Elc SLD 001.0 - Singel Line Diargram (New Expanse)Document1 pagePepbwn 001 Elc SLD 001.0 - Singel Line Diargram (New Expanse)Rian ArfanNo ratings yet
- Energy TransfersDocument36 pagesEnergy TransfersMai HamadaNo ratings yet
- 2020-21 G12 Mock AA-HL Calculator Practice Questions ANSWERSDocument23 pages2020-21 G12 Mock AA-HL Calculator Practice Questions ANSWERS0010048No ratings yet
- Me6411 Manufacturing Technology-II Lab ManualDocument35 pagesMe6411 Manufacturing Technology-II Lab ManualdibyenindusNo ratings yet
- QBR Operation ManualDocument8 pagesQBR Operation Manualmahmoudebrahim96745No ratings yet
- MaterialDocument3 pagesMaterialToday NewsNo ratings yet
- Ramax Hh-Eng P 1604 E6Document8 pagesRamax Hh-Eng P 1604 E6venkithankamNo ratings yet
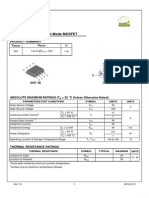
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product SummaryTony RodriguesNo ratings yet
- Sectional Curvature On MathematicaDocument15 pagesSectional Curvature On MathematicaProf. Luis97No ratings yet
- Temp4 Design ProceduresDocument23 pagesTemp4 Design ProceduresAhmed AdelNo ratings yet
- Exploring EquilibriumDocument2 pagesExploring EquilibriumMeagan Jase ArbiloNo ratings yet
- Chem (Day1) 7am 2019 JambDocument9 pagesChem (Day1) 7am 2019 JambUmar FaruqNo ratings yet
- Minima Timing of Eclipsing Binaries: Lubo S BR At, Zden Ek Mikul A Sek and Ond Rej PejchaDocument7 pagesMinima Timing of Eclipsing Binaries: Lubo S BR At, Zden Ek Mikul A Sek and Ond Rej Pejcha14Nguyễn Đăng khoaNo ratings yet
- Fusing Equipment: Elf™ Current-Limiting Dropout FuseDocument12 pagesFusing Equipment: Elf™ Current-Limiting Dropout FuseAhmed SabriNo ratings yet
- JPICE Quiz BeeDocument12 pagesJPICE Quiz BeemateojullieanneNo ratings yet
- Modern Railway TrackDocument15 pagesModern Railway TrackasithaNo ratings yet
- Global PositioningDocument6 pagesGlobal PositioningAkash BansalNo ratings yet
- Sample Paper-Bbe-2022-Class-Viii-P1-At+pcbmDocument22 pagesSample Paper-Bbe-2022-Class-Viii-P1-At+pcbmthangarajbala123No ratings yet
- Koopa Ming Pao Mock 2021 Paper 2 EngDocument16 pagesKoopa Ming Pao Mock 2021 Paper 2 EngJimmy LauNo ratings yet
- Prelim Examination Set A Solutions PDFDocument6 pagesPrelim Examination Set A Solutions PDFOxy GenNo ratings yet
- MHC-V9W-D2N8 Owners Installation Manual ENGDocument91 pagesMHC-V9W-D2N8 Owners Installation Manual ENGZSOLT PULAINo ratings yet
- Microscope Laboratory Activities 2023Document7 pagesMicroscope Laboratory Activities 2023Izzy Dale Cagas SilangaNo ratings yet
- Magnetic Position and Orientation Tracking SystemDocument10 pagesMagnetic Position and Orientation Tracking SystemvalstavNo ratings yet
- Write Answers To All NCERT Intext Solved & Unsolved Problems. 2. Write Answers To All NCERT Questions in ExercisesDocument2 pagesWrite Answers To All NCERT Intext Solved & Unsolved Problems. 2. Write Answers To All NCERT Questions in ExercisesJagriti DaryaniNo ratings yet
- Fourier Series Note5Document13 pagesFourier Series Note52133MANAS PARABNo ratings yet
- Manual de Serviço Dual 1219Document43 pagesManual de Serviço Dual 1219rogerioNo ratings yet
- Ocean Engineering: Yingchun Xie, Jintong Huang, Xiangkun Li, Xiaojie Tian, Guijie Liu, Dingxin LengDocument15 pagesOcean Engineering: Yingchun Xie, Jintong Huang, Xiangkun Li, Xiaojie Tian, Guijie Liu, Dingxin Lengmohamad shahrakNo ratings yet
- 05 - ARISTONCAVI - Mining Tunneling CablesDocument55 pages05 - ARISTONCAVI - Mining Tunneling CablesJuan AdrianzenNo ratings yet
- Module 4 Work Energy PowerDocument7 pagesModule 4 Work Energy PowerGreen BrainNo ratings yet