Download as pdf or txt
You might also like
- Linkbelt Lattice Boom Crawler Crane Ls 110 Ls 112 Ls 118 Service ManualDocument22 pagesLinkbelt Lattice Boom Crawler Crane Ls 110 Ls 112 Ls 118 Service Manualchelseagomez020399mdi100% (133)
- SuccessFactors Employee Central Practice QuestionsDocument11 pagesSuccessFactors Employee Central Practice Questionsrekha89757% (7)
- An Introduction To Digital Control Systems - Tutorial: ResearchDocument21 pagesAn Introduction To Digital Control Systems - Tutorial: ResearchNahomNo ratings yet
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocument8 pagesAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiNo ratings yet
- Cascaded PIDDocument14 pagesCascaded PIDTatenda BizureNo ratings yet
- Simultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersDocument8 pagesSimultaneous Closed-Loop Automatic Tuning Method For Cascade ControllersAl-ShukaNo ratings yet
- CDC 2005 1583310Document6 pagesCDC 2005 1583310SowrirajanNo ratings yet
- Reduced Order ControllerDocument6 pagesReduced Order Controllerabyss2000No ratings yet
- Worksheet 10Document3 pagesWorksheet 10rahmat qambariNo ratings yet
- CW Digital Control-2Document17 pagesCW Digital Control-2Hasnain KazmiNo ratings yet
- Session 6Document13 pagesSession 6mohammedNo ratings yet
- Optimal Design of PID Controller by Multi-Objective Genetic AlgorithmsDocument7 pagesOptimal Design of PID Controller by Multi-Objective Genetic AlgorithmsDjaouida MansouriNo ratings yet
- Data Structures and AlgorithmsDocument44 pagesData Structures and AlgorithmselemaniaqNo ratings yet
- A. S. Silveira Et Al. - Pseudo PID Controler - Design, Tuning and ApplicationsDocument6 pagesA. S. Silveira Et Al. - Pseudo PID Controler - Design, Tuning and ApplicationsAndreza FerreiraNo ratings yet
- Design of An Adaptive Predictive Controller For A Continuous Stirred Tank ReactorDocument7 pagesDesign of An Adaptive Predictive Controller For A Continuous Stirred Tank ReactorMatthew BennettNo ratings yet
- DC Motor Speed Control Using Pid Controller: June 2005Document6 pagesDC Motor Speed Control Using Pid Controller: June 2005Juan Jose Borra GarciaNo ratings yet
- Direct Synthesis-Based Controller Design For Integrating Processes With Time DelayDocument19 pagesDirect Synthesis-Based Controller Design For Integrating Processes With Time DelayLloyds RajaNo ratings yet
- 10.450 Process Dynamics, Operations, and Control Lecture Notes - 21 Lesson 21. Controllers 21.0 ContextDocument5 pages10.450 Process Dynamics, Operations, and Control Lecture Notes - 21 Lesson 21. Controllers 21.0 ContextBongibethu Msekeli HlabanoNo ratings yet
- Y y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamDocument3 pagesY y T DT Dy y X: 10.450 Process Dynamics, Operations, and Control Spring 2002 Final ExamManoj TribhuwanNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument46 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- Performance Assessment of PID ControllersDocument22 pagesPerformance Assessment of PID ControllersAlvarado, James Alfred C.No ratings yet
- Model Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentDocument44 pagesModel Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentAayush PatidarNo ratings yet
- Fopid With GADocument4 pagesFopid With GAAl-momaniMohammadNo ratings yet
- Skogestad PDFDocument19 pagesSkogestad PDFRajendra100% (1)
- B.Tech Final Thesis From Ab-Strack FinalDocument47 pagesB.Tech Final Thesis From Ab-Strack FinalTapasyaNo ratings yet
- An Embedded Controller For The PendubotDocument6 pagesAn Embedded Controller For The PendubotCarlos Alberto Cribillero VegaNo ratings yet
- PID ControlDocument40 pagesPID ControlSśēmǾǿ ŔämáďañNo ratings yet
- Design of Static and Dynamic DecouplerDocument6 pagesDesign of Static and Dynamic DecouplerAli AlmisbahNo ratings yet
- IJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemDocument4 pagesIJIREEICE8 s9 Pradeep MIMO-PID Controller For 3 Area Power SystemPradeepKumarMallemNo ratings yet
- 666 PDFDocument5 pages666 PDFFawaz PartoNo ratings yet
- Practical Guidelines For Tuning PID Controllers by Using MOMI MethodDocument5 pagesPractical Guidelines For Tuning PID Controllers by Using MOMI MethodRamanathanNo ratings yet
- DC Motor Speed Control Using Pid Controller: June 2005Document6 pagesDC Motor Speed Control Using Pid Controller: June 2005Anas RajputNo ratings yet
- Intoduction To Digital ControlDocument19 pagesIntoduction To Digital ControlKeanu Espina0% (1)
- Decentralized PID ControllerDocument6 pagesDecentralized PID ControllerrishuNo ratings yet
- PanelDataNotes 7Document77 pagesPanelDataNotes 7Anonymous ed8Y8fCxkSNo ratings yet
- Adaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsDocument9 pagesAdaptive Fuzzy Control of Direct-Current Motor Dead-Zone SystemsVictor PassosNo ratings yet
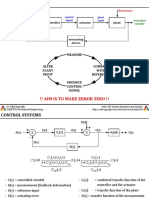
- !! Aim Is To Make Error Zero !!: Controller Actuator PlantDocument11 pages!! Aim Is To Make Error Zero !!: Controller Actuator PlantcapturemrahNo ratings yet
- Implementation of A Fixed Low Order Controller On STM32 MicrocontrollerDocument8 pagesImplementation of A Fixed Low Order Controller On STM32 Microcontrollerbreismam alfonso rueda diazNo ratings yet
- Optimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesDocument6 pagesOptimal PID-Control On First Order Plus Time Delay Systems & Verification of The SIMC RulesAnonymous WkbmWCa8MNo ratings yet
- E Z Tze Z F T F Z: IC 6701 Digital Control System Department of ICE 2017-18Document24 pagesE Z Tze Z F T F Z: IC 6701 Digital Control System Department of ICE 2017-18Barani DharanNo ratings yet
- Robust Track SMCDocument55 pagesRobust Track SMCsiddhartha gangulyNo ratings yet
- 8 Digital Controller Realization: e (T) ADC G (Z) DAC P Lant U (KT) e (KT) U (T)Document4 pages8 Digital Controller Realization: e (T) ADC G (Z) DAC P Lant U (KT) e (KT) U (T)Yassine DjillaliNo ratings yet
- ELEC4410 Control System Design Revision NotesDocument10 pagesELEC4410 Control System Design Revision Notescjman404No ratings yet
- Systematic Approach of Fixed Point 8x8 IDCT and DCTDocument6 pagesSystematic Approach of Fixed Point 8x8 IDCT and DCTpranu01234No ratings yet
- OpuNarcisse DigitalFeedbackControlDocument10 pagesOpuNarcisse DigitalFeedbackControlDario Jose Gonzalez GuacareNo ratings yet
- Decoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Document32 pagesDecoupling Control Schemes of Multivariable Systems (多变量系统的解耦控制)Waqas KianiNo ratings yet
- ControlSystem2 PDFDocument40 pagesControlSystem2 PDFBùi MTriếtNo ratings yet
- 6 Digital Controller DesignDocument23 pages6 Digital Controller DesignEngr. Naveed MazharNo ratings yet
- Closed-Form Mathematical Representations of Interval Type-2 Fuzzy Logic SystemsDocument15 pagesClosed-Form Mathematical Representations of Interval Type-2 Fuzzy Logic SystemsAnonymous KhhapQJVYtNo ratings yet
- IeeeDocument7 pagesIeeesadouniNo ratings yet
- Eec 161 امتحان نهاية الترم الثانى 2020-2021 - نظم تحكم عددىDocument2 pagesEec 161 امتحان نهاية الترم الثانى 2020-2021 - نظم تحكم عددىArtist AbramNo ratings yet
- Data-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataDocument6 pagesData-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataArif HidayatNo ratings yet
- 003 ME31002 - Block Diagram-2021febDocument54 pages003 ME31002 - Block Diagram-2021febShek Yu LaiNo ratings yet
- PidDocument10 pagesPidElvis YuNo ratings yet
- Self Tuning PID Contr Oller Using Ziegler Nichols Method For PR Ogr Ammable Logic Contr Oller SDocument6 pagesSelf Tuning PID Contr Oller Using Ziegler Nichols Method For PR Ogr Ammable Logic Contr Oller SkalyanNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument20 pagesController Design Based On Transient Response CriteriaGapuk MaboekNo ratings yet
- Position Form & Velocity Form of PID ControllerDocument6 pagesPosition Form & Velocity Form of PID ControllerThefairman UnkownNo ratings yet
- PID ControllerDocument4 pagesPID ControllerHammad KhanNo ratings yet
- Coelho Santana Mota Article IFAC CLCA 2018-ReviewDocument6 pagesCoelho Santana Mota Article IFAC CLCA 2018-ReviewStenio CoelhoNo ratings yet
- Editorje Journal Editor Jurnal Elektrikal Volume 6 Nomor 1 Juni 2019 62 69Document8 pagesEditorje Journal Editor Jurnal Elektrikal Volume 6 Nomor 1 Juni 2019 62 69M. Rifki Izzul HaqNo ratings yet
- Soal 5Document1 pageSoal 5M. Rifki Izzul HaqNo ratings yet
- Soal 1Document1 pageSoal 1M. Rifki Izzul HaqNo ratings yet
- Soal 6Document1 pageSoal 6M. Rifki Izzul HaqNo ratings yet
- Soal 3Document1 pageSoal 3M. Rifki Izzul HaqNo ratings yet
- Soal 2Document1 pageSoal 2M. Rifki Izzul HaqNo ratings yet
- Elektronika Analog I Pertemuan 2Document75 pagesElektronika Analog I Pertemuan 2M. Rifki Izzul HaqNo ratings yet
- Dok Baru 2020-03-16 16.47.24Document3 pagesDok Baru 2020-03-16 16.47.24M. Rifki Izzul HaqNo ratings yet
- Dok Baru 2019-11-07 13.18.26Document3 pagesDok Baru 2019-11-07 13.18.26M. Rifki Izzul HaqNo ratings yet
- Dok Baru 2019-10-17 12.19.03Document4 pagesDok Baru 2019-10-17 12.19.03M. Rifki Izzul HaqNo ratings yet
- Tugas Determinan MatriksDocument5 pagesTugas Determinan MatriksM. Rifki Izzul HaqNo ratings yet
- Week1 CombineDocument91 pagesWeek1 CombineraleyNo ratings yet
- TNS Case Studies NeedScope April2011Document20 pagesTNS Case Studies NeedScope April2011Fatima Gardezi50% (2)
- The Cost of Goods Sold For The Month of December: Excel Professional Services, IncDocument4 pagesThe Cost of Goods Sold For The Month of December: Excel Professional Services, IncmatildaNo ratings yet
- Block 3 Welcome LetterDocument2 pagesBlock 3 Welcome LetterRobNo ratings yet
- BEY, Marquis - Black Trans FeminismDocument305 pagesBEY, Marquis - Black Trans FeminismSilvana SouzaNo ratings yet
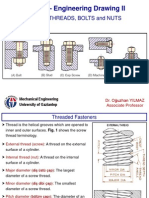
- SCREW THREADS, BOLTS and NUTS PDFDocument10 pagesSCREW THREADS, BOLTS and NUTS PDFhrhgk50% (2)
- Class 9 Science Worksheet - Matter in Our Surroundings - 1Document2 pagesClass 9 Science Worksheet - Matter in Our Surroundings - 1Sumedha Thakur100% (1)
- IP Rating ChartDocument5 pagesIP Rating Charthemant kumarNo ratings yet
- Itt420: Network and System Administration Lab Exercise 1Document5 pagesItt420: Network and System Administration Lab Exercise 1Nurul Shuhaini AidaNo ratings yet
- Hanad General Trading Financial Statements 2023Document8 pagesHanad General Trading Financial Statements 2023Nyakwar Leoh NyabayaNo ratings yet
- User Manual: Controller Board Driver Software For Siemens SIMATIC S7-300Document44 pagesUser Manual: Controller Board Driver Software For Siemens SIMATIC S7-300Ahmet Hrustić100% (1)
- Chapter No. 25 Maintenance of Canals & DrainsDocument4 pagesChapter No. 25 Maintenance of Canals & DrainsMANJEET SINGHNo ratings yet
- En - S8018II Spec SheetDocument3 pagesEn - S8018II Spec SheetAndrea PaoNo ratings yet
- Data Interpretation Concepts and Formulas SplessonsDocument32 pagesData Interpretation Concepts and Formulas SplessonsCharanNo ratings yet
- RDDocument6 pagesRDViệt HùngNo ratings yet
- Sony Hcd-Bx6av Dx6avDocument64 pagesSony Hcd-Bx6av Dx6avFrancisco ParedesNo ratings yet
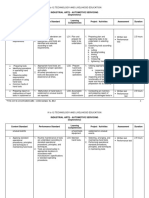
- Industrial Arts - Automotive Servicing (Exploratory) : K To 12 Technology and Livelihood EducationDocument7 pagesIndustrial Arts - Automotive Servicing (Exploratory) : K To 12 Technology and Livelihood Educationjayson acunaNo ratings yet
- Walther Handgun Comparison ChartDocument1 pageWalther Handgun Comparison ChartSasaki KyoukaNo ratings yet
- Pairing Scheme 1st Year 2024 BY PHYSICS INN ACDEMIA M.A. JAVEDDocument1 pagePairing Scheme 1st Year 2024 BY PHYSICS INN ACDEMIA M.A. JAVEDabdull phyNo ratings yet
- SQL Database Interview QuestionsDocument29 pagesSQL Database Interview Questionstest caseNo ratings yet
- Strategies Towards Comprehensive Hemophilia Care Services in Uttar Pradesh" SGPGIMS, LucknowDocument4 pagesStrategies Towards Comprehensive Hemophilia Care Services in Uttar Pradesh" SGPGIMS, LucknowsalmanNo ratings yet
- CVPDocument20 pagesCVPThomas K. AddaiNo ratings yet
- Kubernetes Controllers - The Kubernetes WorkshopDocument70 pagesKubernetes Controllers - The Kubernetes WorkshopOLALEKAN ALEDARENo ratings yet
- Kilmarnock To ArdrossanDocument2 pagesKilmarnock To Ardrossanadamdon89100% (1)
- Query ManualDocument37 pagesQuery ManualstraNo ratings yet
- Series HDocument6 pagesSeries HAviation World100% (3)
- EN Quick Reference Guide Fabian HFOi-V4.0Document30 pagesEN Quick Reference Guide Fabian HFOi-V4.0Tanzimul IslamNo ratings yet
- Dark Energy and Dark MatterDocument26 pagesDark Energy and Dark MattersaphirehaelNo ratings yet