Download as pdf or txt
You might also like
- Cse 331 HW 1 2Document8 pagesCse 331 HW 1 2api-522855390No ratings yet
- AMA Answers - General MathematicsDocument15 pagesAMA Answers - General MathematicsDaniel Tom Chuy Darm100% (2)
- Interaction Diagram For Columns NewDocument2 pagesInteraction Diagram For Columns NewBunkun1575% (4)
- Procedure: Detailed Lesson Plan Mathematics 8Document6 pagesProcedure: Detailed Lesson Plan Mathematics 8Emeline Sarmiento Ramos67% (3)
- Tugas Kelompok-5 Neraca Massa Dan Energi SELF ASSEMENT TEST Page 462 Himmelblau 6 EditionDocument1 pageTugas Kelompok-5 Neraca Massa Dan Energi SELF ASSEMENT TEST Page 462 Himmelblau 6 EditionJenny AzzahraNo ratings yet
- TUGAS 5 (Revisi Format) - Kelompok 6Document3 pagesTUGAS 5 (Revisi Format) - Kelompok 6Jenny AzzahraNo ratings yet
- Maths Assessment Task Lana Jamil Year 9Document17 pagesMaths Assessment Task Lana Jamil Year 9api-412888085100% (1)
- Gate Question (Limit) PDFDocument4 pagesGate Question (Limit) PDFArpit Patel83% (6)
- Chap 10 Marlin 2002Document42 pagesChap 10 Marlin 2002sabto04296No ratings yet
- Probleme Control OptimalDocument2 pagesProbleme Control OptimalCostica PoienaruNo ratings yet
- Anexa - Diagrame BODE Tipice: 0 T 1 TS) S (G Pol T 1 0 T 1 Ts 1) S (GDocument2 pagesAnexa - Diagrame BODE Tipice: 0 T 1 TS) S (G Pol T 1 0 T 1 Ts 1) S (GDenisa OlaruNo ratings yet
- PR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Document13 pagesPR Ufung Regelungstechnik I (Control Systems I) : To Be Returned at The End of The Exam!Armando MaloneNo ratings yet
- Figure Tp1sal - CopieDocument4 pagesFigure Tp1sal - CopieAudrey YagueNo ratings yet
- Ejericio 26 - 04 - 21Document3 pagesEjericio 26 - 04 - 21Diego Alejandro Medina RodriguezNo ratings yet
- Com MóveisDocument158 pagesCom MóveisDaniel MestradoUNBNo ratings yet
- Experimental Report 5 Determination of Moment of Inertia Based On Torsional VibrationDocument4 pagesExperimental Report 5 Determination of Moment of Inertia Based On Torsional VibrationCuber HCNo ratings yet
- Forecasting MiM Exercises Part3Document2 pagesForecasting MiM Exercises Part3孟启扬No ratings yet
- Understanding Discrete Fourier Transform (DFT) and Fast Fourier Transform (FFT) PDFDocument16 pagesUnderstanding Discrete Fourier Transform (DFT) and Fast Fourier Transform (FFT) PDFÁc QủyNo ratings yet
- Ab 140g R-Frame Breaker Trip CurveDocument1 pageAb 140g R-Frame Breaker Trip CurveRobbie ThompsonNo ratings yet
- TCL 55S405 CNET Review Calibration ResultsDocument3 pagesTCL 55S405 CNET Review Calibration ResultsDavid KatzmaierNo ratings yet
- Adc Lab 3Document6 pagesAdc Lab 3ahad mushtaqNo ratings yet
- 3 Matched FilterDocument34 pages3 Matched FilterĐỗ Trọng Hoàng NamNo ratings yet
- Lecture 2 MDocument28 pagesLecture 2 MTrang DangNo ratings yet
- RT1N141C (N1)Document3 pagesRT1N141C (N1)Homer Sadych Henao MarinNo ratings yet
- Handout 2: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertDocument5 pagesHandout 2: Course Notes Were Prepared by Dr. R.M.A.P. Rajatheva and Revised by Dr. Poompat SaengudomlertBryan YaranonNo ratings yet
- Is 8422-2 - 1977 - 2Document1 pageIs 8422-2 - 1977 - 2Svapnesh ParikhNo ratings yet
- LMK HOP 140x80x5 IZVEŠTAJDocument6 pagesLMK HOP 140x80x5 IZVEŠTAJNIkola918No ratings yet
- ICS Architecture (25 Slides)Document26 pagesICS Architecture (25 Slides)Paul MiersNo ratings yet
- Vent To Atmosphere: Plasma Reactor CHDocument7 pagesVent To Atmosphere: Plasma Reactor CHapi-3728640No ratings yet
- Epson HC4000 CNET Review Calibration ResultsDocument3 pagesEpson HC4000 CNET Review Calibration ResultsDavid Katzmaier0% (1)
- Digsilent Powerfactory: Technical Reference DocumentationDocument11 pagesDigsilent Powerfactory: Technical Reference Documentationbeimar heredia saiguaNo ratings yet
- Flat Keys and KeywaysDocument1 pageFlat Keys and KeywaysBarNo ratings yet
- Concept of Device Modeling (Version 1.0) : Bee Technologies IncDocument13 pagesConcept of Device Modeling (Version 1.0) : Bee Technologies IncEngr RatulNo ratings yet
- FT AnswerDocument4 pagesFT AnswerKiranNo ratings yet
- LMTD Correction Factor ChartsDocument3 pagesLMTD Correction Factor ChartsMochammad ReshaNo ratings yet
- Homework 5Document6 pagesHomework 5euler96No ratings yet
- 05 Binary Operations - R01Document14 pages05 Binary Operations - R01thaibkproNo ratings yet
- Input Output Desired Output X0 X1 X2 W0 W1 W2 Net y 1 0 0 1 1 1 1 1 0 1 0 1 0.5 1 1 1.5 1 0 1 1 0 0 1 0.5 1 1 0 1 1 1 - 0.5 0.5 0.5 0.5 1 1Document4 pagesInput Output Desired Output X0 X1 X2 W0 W1 W2 Net y 1 0 0 1 1 1 1 1 0 1 0 1 0.5 1 1 1.5 1 0 1 1 0 0 1 0.5 1 1 0 1 1 1 - 0.5 0.5 0.5 0.5 1 1Fikri BasaNo ratings yet
- Report Blanks InsulinDocument7 pagesReport Blanks InsulinHelena Muñoz GalanNo ratings yet
- Continuous Time Fourier Transform (CTFT) : F (F) Z F (T) e DTDocument5 pagesContinuous Time Fourier Transform (CTFT) : F (F) Z F (T) e DTJanNo ratings yet
- Klem C PDFDocument3 pagesKlem C PDFYounkPDNo ratings yet
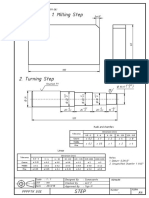
- Milling Step: PPPPTK Boe A4Document3 pagesMilling Step: PPPPTK Boe A4YounkPDNo ratings yet
- Klem C PDFDocument3 pagesKlem C PDFYounkPDNo ratings yet
- Plate ColumnsDocument3 pagesPlate ColumnsK SrikanthNo ratings yet
- Problem 3Document2 pagesProblem 3Oscar CruzNo ratings yet
- Six Benchmarks of US Treasury YieldsDocument8 pagesSix Benchmarks of US Treasury YieldsATANU ROYCHOUDHURYNo ratings yet
- Control System Analysis & Design by Frequency ResponseDocument38 pagesControl System Analysis & Design by Frequency ResponseDozdiNo ratings yet
- Sunte Simple Circuit: T-Spice1Document66 pagesSunte Simple Circuit: T-Spice1tan_thetaNo ratings yet
- Casa Canyes: A Nu Se Măsura Pe Planșă!Document1 pageCasa Canyes: A Nu Se Măsura Pe Planșă!mate cristiNo ratings yet
- Correlated and Uncorrelated Signals: TransmitDocument34 pagesCorrelated and Uncorrelated Signals: TransmitSangeeta TripathiNo ratings yet
- Lec08 2015Document42 pagesLec08 2015Abdelmajid AbouloifaNo ratings yet
- Nxble 32 Chint Series CatalogueDocument1 pageNxble 32 Chint Series CataloguelunbjnNo ratings yet
- Manual INTERRUPTOR ABBDocument5 pagesManual INTERRUPTOR ABBEsteban JaramilloNo ratings yet
- Plan Fondation: A C E GH F BDocument1 pagePlan Fondation: A C E GH F BSerigne Abdoul Aziz MbodjNo ratings yet
- Q1-Wave Equation ProgramDocument5 pagesQ1-Wave Equation ProgramAhmed HwaidiNo ratings yet
- Finite Difference MethodDocument9 pagesFinite Difference Methodtanish rajooNo ratings yet
- Ieee-485 Sizing Program (Ver.1, 7-22-11, Ms2003)Document8 pagesIeee-485 Sizing Program (Ver.1, 7-22-11, Ms2003)Ann DodsonNo ratings yet
- SOD123Document5 pagesSOD123stefano soriceNo ratings yet
- An Axiomatic Approach To Turbulence by Amador MurielDocument18 pagesAn Axiomatic Approach To Turbulence by Amador MurielNicoelNo ratings yet
- Trigonometry - CETDocument19 pagesTrigonometry - CETDr Thushar Rai NNo ratings yet
- TCL 65Q825 CNET Calibration ResultsDocument3 pagesTCL 65Q825 CNET Calibration ResultsDavid Katzmaier100% (1)
- Control de Potencia REIVAX (Unmsm) Potencia: Variacion Del Parametro BT Cabrejos Espinoza Cesar ArmandoDocument1 pageControl de Potencia REIVAX (Unmsm) Potencia: Variacion Del Parametro BT Cabrejos Espinoza Cesar ArmandoCesar DceNo ratings yet
- SIPART DR20 Compact Controller Project Planning ManualDocument2 pagesSIPART DR20 Compact Controller Project Planning ManualDavlos IngNo ratings yet
- Timers On DelayDocument5 pagesTimers On DelayOJ ACNo ratings yet
- Plan FondationDocument1 pagePlan FondationSerigne Abdoul Aziz MbodjNo ratings yet
- Lec08 - Introduction To VoltammetryDocument18 pagesLec08 - Introduction To VoltammetryJenny AzzahraNo ratings yet
- PR 01 - Kelompok 06Document5 pagesPR 01 - Kelompok 06Jenny AzzahraNo ratings yet
- Final Report - TK06Document419 pagesFinal Report - TK06Jenny AzzahraNo ratings yet
- Tugas 5 - Self Assesment Test: KnownDocument3 pagesTugas 5 - Self Assesment Test: KnownJenny AzzahraNo ratings yet
- 20a Three Mode PID Control AustinDocument9 pages20a Three Mode PID Control AustinJenny AzzahraNo ratings yet
- TK23 - Final ReportDocument150 pagesTK23 - Final ReportJenny AzzahraNo ratings yet
- Product Manufacturing and Plant Layout 2021Document82 pagesProduct Manufacturing and Plant Layout 2021Jenny AzzahraNo ratings yet
- Chemical Product Design Introduction-2018Document78 pagesChemical Product Design Introduction-2018Jenny AzzahraNo ratings yet
- Sova: Solar Refrigeration For Vaccine: Revised Assignment 3Document71 pagesSova: Solar Refrigeration For Vaccine: Revised Assignment 3Jenny AzzahraNo ratings yet
- International Smart Competition CompetitionDocument7 pagesInternational Smart Competition CompetitionJenny AzzahraNo ratings yet
- Lect 01 Pendahuluan - NeedsDocument91 pagesLect 01 Pendahuluan - NeedsJenny AzzahraNo ratings yet
- Soal 1: Find The Reaction Rate Constant and Order of Reaction WRT !Document3 pagesSoal 1: Find The Reaction Rate Constant and Order of Reaction WRT !Jenny AzzahraNo ratings yet
- Plant Layout and IsometricDocument46 pagesPlant Layout and IsometricJenny Azzahra100% (2)
- Lesson 4 Logic and Knowledge RepresentationDocument100 pagesLesson 4 Logic and Knowledge Representationthomas mumoNo ratings yet
- U6l1t Similar TrianglesDocument3 pagesU6l1t Similar TrianglesShabina KhalidNo ratings yet
- Number Theory BSC Notes PDFDocument24 pagesNumber Theory BSC Notes PDFAjit Baruah0% (1)
- Edu Vee Dir Approved CoursesDocument773 pagesEdu Vee Dir Approved CoursesVictoria TowNo ratings yet
- DPP Qs 2.0 Complex Numbers (New Syllabus)Document3 pagesDPP Qs 2.0 Complex Numbers (New Syllabus)akash.c.2005No ratings yet
- The Linear Output Regulation Problem: Andrea SerraniDocument99 pagesThe Linear Output Regulation Problem: Andrea SerraniDaniel GuevaraNo ratings yet
- TempDocument28 pagesTempabdulrahim mohammed al aminNo ratings yet
- Part A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2Document5 pagesPart A: Texas A&M University MEEN 683 Multidisciplinary System Design Optimization (MSADO) Spring 2021 Assignment 2BobaNo ratings yet
- Tutorial Letter 101/3/2015: Quantitative Modelling DSC1520Document119 pagesTutorial Letter 101/3/2015: Quantitative Modelling DSC1520Khathutshelo KharivheNo ratings yet
- Chapter 2 - P2 PDFDocument41 pagesChapter 2 - P2 PDFDr-Rabia Almamalook100% (1)
- Business Math 1st Quarter Chapter 1 Part 2 LessonDocument15 pagesBusiness Math 1st Quarter Chapter 1 Part 2 LessonDearla BitoonNo ratings yet
- Information Theory and Coding NOTESDocument129 pagesInformation Theory and Coding NOTESRamola JoyNo ratings yet
- Chapter 4 ExercisesDocument5 pagesChapter 4 ExercisestharunenjpNo ratings yet
- Measurement Physics 11Document2 pagesMeasurement Physics 11taiNo ratings yet
- 6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadDocument2 pages6th Maths EM Term 1 Exam 2022 Original Question Paper Tenkasi District English Medium PDF DownloadNepetimNo ratings yet
- Jack Johnston, John DiNardo Econometric Methods, Fourth Edition PDFDocument514 pagesJack Johnston, John DiNardo Econometric Methods, Fourth Edition PDFMarcelo Rodrigo Riffo67% (3)
- The Ultimate Kumon ReviewDocument13 pagesThe Ultimate Kumon ReviewRichie BallyearsNo ratings yet
- Numbers Dec 2012Document8 pagesNumbers Dec 2012PVenkataPuneethhNo ratings yet
- Probabilities A. IntroductionDocument11 pagesProbabilities A. IntroductionBella LendioNo ratings yet
- Operators in CDocument17 pagesOperators in CBHAVPRITANo ratings yet
- Nonparametric Statistics Theory and MethodsDocument275 pagesNonparametric Statistics Theory and MethodsJunio CésarNo ratings yet
- Joint Variation m3 L3 October 3-5Document5 pagesJoint Variation m3 L3 October 3-5Kheza Bohol Deliman Dañas100% (1)
- CS 455 - Computer Graphics: Window To Viewport TransformationsDocument21 pagesCS 455 - Computer Graphics: Window To Viewport TransformationsShyam KaranthNo ratings yet
- Geaecsec Vac Notice RevisedDocument5 pagesGeaecsec Vac Notice RevisedKrishna SharmaNo ratings yet
- Mathematics 3 New 1Document216 pagesMathematics 3 New 1Maharshi DarjiNo ratings yet