Download as pdf or txt
You might also like
- Laser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDocument10 pagesLaser Ranging: A Critical Review of Usual Techniques For Distance MeasurementDanny100% (1)
- Displacement Estimation of A RC Beam Test Based On TSS AlgorithmDocument4 pagesDisplacement Estimation of A RC Beam Test Based On TSS AlgorithmAdriana Montilla BolañosNo ratings yet
- 107 Shad IPODocument13 pages107 Shad IPOPranav ChopdeNo ratings yet
- Electronics: Active Contour Model Using Fast Fourier Transformation For Salient Object DetectionDocument20 pagesElectronics: Active Contour Model Using Fast Fourier Transformation For Salient Object DetectionsantoshNo ratings yet
- Learning Conditional Photometric Stereo With High-Resolution FeaturesDocument14 pagesLearning Conditional Photometric Stereo With High-Resolution Featuresifte5104385No ratings yet
- Reconstructing SurfacesDocument16 pagesReconstructing SurfacesMauricio Ignacio García MoralesNo ratings yet
- Microgeometry Capture Using An Elastomeric SensorDocument8 pagesMicrogeometry Capture Using An Elastomeric Sensorhappydude7632No ratings yet
- 1 s2.0 S0963869522000998 MainDocument13 pages1 s2.0 S0963869522000998 MaintjuliuyjNo ratings yet
- An Integrated Imaging Sensor For Aberration-Corrected 3D PhotographyDocument26 pagesAn Integrated Imaging Sensor For Aberration-Corrected 3D PhotographyKFSwNo ratings yet
- An Improved Rotation Invariant CNN-based Detector With Rotatable Bounding Boxes For Aerial Image DetectionDocument5 pagesAn Improved Rotation Invariant CNN-based Detector With Rotatable Bounding Boxes For Aerial Image DetectionHamzahNo ratings yet
- Terrestrial Scanning or Digital Images IDocument6 pagesTerrestrial Scanning or Digital Images Ilendra238053No ratings yet
- RP 3Document14 pagesRP 3RACHIT 2K21/B12/32No ratings yet
- Sensors 21 00319 v3Document14 pagesSensors 21 00319 v3Luis SánchezNo ratings yet
- Robust Light Field Depth Estimation For Noisy Scene With OcclusionDocument9 pagesRobust Light Field Depth Estimation For Noisy Scene With OcclusionWafa BenzaouiNo ratings yet
- LED Source Interferometer For Microscopic Fringe Projection Profilometry Using A Gates' Interferometer ConfigurationDocument7 pagesLED Source Interferometer For Microscopic Fringe Projection Profilometry Using A Gates' Interferometer ConfigurationDaniel Alberto García EspinosaNo ratings yet
- Efficient Hybrid Tree-Based Stereo Matching With Applications To Postcapture Image RefocusingDocument15 pagesEfficient Hybrid Tree-Based Stereo Matching With Applications To Postcapture Image RefocusingIsaac AnamanNo ratings yet
- A Local Contrast Method For Small Infrared Target DetectionDocument8 pagesA Local Contrast Method For Small Infrared Target DetectionbinukirubaNo ratings yet
- Edge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmDocument5 pagesEdge Detection and Geometric Feature Extraction of A Burner's Jet in FNBZ Images Using Seeded Region Growing AlgorithmAnonymous PkeI8e84RsNo ratings yet
- Sensors 23 08118Document21 pagesSensors 23 08118essamabdelhamiedNo ratings yet
- An Adaptive Morphological Filter For Moving Object SegmentationDocument8 pagesAn Adaptive Morphological Filter For Moving Object SegmentationFayadh AleneziNo ratings yet
- Signing The Unsigned: Robust Surface Reconstruction From Raw PointsetsDocument9 pagesSigning The Unsigned: Robust Surface Reconstruction From Raw Pointsetsjmckin_2010No ratings yet
- Contour Detection and Hierarchical Image SegmentationDocument19 pagesContour Detection and Hierarchical Image SegmentationQuynhtrang NguyenNo ratings yet
- 1 OnlineDocument7 pages1 OnlineAHMADNo ratings yet
- Photografy DeformationDocument12 pagesPhotografy DeformationMirkoNo ratings yet
- 3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron MicroscopeDocument24 pages3 D Vision Feedback For Nanohandling Monitoring in A Scanning Electron Microscopepurrab divakarNo ratings yet
- Light Field Image Processing: An OverviewDocument29 pagesLight Field Image Processing: An OverviewWafa BenzaouiNo ratings yet
- PXC 387549Document8 pagesPXC 387549Adisti Nuraprilia prasastiNo ratings yet
- Sensing Matrix Design Via Mutual Coherence Minimization For Electromagnetic Compressive Imaging ApplicationsDocument13 pagesSensing Matrix Design Via Mutual Coherence Minimization For Electromagnetic Compressive Imaging ApplicationsdwipradNo ratings yet
- Optics Communications: Di Guo, Jingwen Yan, Xiaobo QuDocument7 pagesOptics Communications: Di Guo, Jingwen Yan, Xiaobo QuWafa BenzaouiNo ratings yet
- Digital Adaptive Optics With Interferometric Homodyne Encoding For Mitigating Atmospheric TurbulenceDocument15 pagesDigital Adaptive Optics With Interferometric Homodyne Encoding For Mitigating Atmospheric TurbulencePierre LuusNo ratings yet
- PhysRevApplied.21.014055 Current - Density - ODMRDocument10 pagesPhysRevApplied.21.014055 Current - Density - ODMRTofianme SorgweNo ratings yet
- Ad Joint Nonlinear Ray Tracing AuthorDocument13 pagesAd Joint Nonlinear Ray Tracing AuthorAlanis SoteloNo ratings yet
- Wallace1994 Article SpaceVariantImageProcessingDocument20 pagesWallace1994 Article SpaceVariantImageProcessingNikola RudjerNo ratings yet
- Cdnet: Cnn-Based Cloud Detection For Remote Sensing ImageryDocument17 pagesCdnet: Cnn-Based Cloud Detection For Remote Sensing ImageryCesar Luis AybarNo ratings yet
- 1 s2.0 S0141029622013566 MainDocument20 pages1 s2.0 S0141029622013566 MainRIGOBERTO NAVA GONZALEZNo ratings yet
- Robust Planar Target Tracking and Pose Estimation From A Single ConcavityDocument7 pagesRobust Planar Target Tracking and Pose Estimation From A Single ConcavitydharmithNo ratings yet
- Reactive Grasping Using Optical Proximity SensorsDocument8 pagesReactive Grasping Using Optical Proximity SensorssigmateNo ratings yet
- Chaotic Scan - Dogaru2010Document5 pagesChaotic Scan - Dogaru2010phongdv107No ratings yet
- Remote SensingDocument21 pagesRemote SensingABờCờNguyễnNo ratings yet
- Ray SplatDocument9 pagesRay SplatMark Anthony Rodado MuncadaNo ratings yet
- Symmetry 12 01056 With CoverDocument16 pagesSymmetry 12 01056 With Coversiandowse03No ratings yet
- Simplified Novel Method For Edge Detection in Digital ImagesDocument6 pagesSimplified Novel Method For Edge Detection in Digital ImagesBasanagouda NavadagiNo ratings yet
- Chandrajit Bajaj:, Edited by C. Bajaj C 1998 John Wiley & Sons LTDDocument33 pagesChandrajit Bajaj:, Edited by C. Bajaj C 1998 John Wiley & Sons LTDGoutam AgrawalNo ratings yet
- Dynamic Range Optimization of Optoelectronic Systems Based - 2023 - Results inDocument6 pagesDynamic Range Optimization of Optoelectronic Systems Based - 2023 - Results inronaldquezada038No ratings yet
- Direct Visual-Inertial Odometry With Stereo Cameras: Vladyslav Usenko, Jakob Engel, J Org ST Uckler, and Daniel CremersDocument8 pagesDirect Visual-Inertial Odometry With Stereo Cameras: Vladyslav Usenko, Jakob Engel, J Org ST Uckler, and Daniel CremersasdfgNo ratings yet
- Sensors 23 03282 v2Document22 pagesSensors 23 03282 v2corneli@No ratings yet
- 2019 Optical Remote Sensing Image Waters Extraction Technology Based On Deep Learning Context UnetDocument4 pages2019 Optical Remote Sensing Image Waters Extraction Technology Based On Deep Learning Context UnetsabrineNo ratings yet
- Deep Learning Realm For Geophysics: Seismic Acquisition, Processing, Interpretation, and InversionDocument26 pagesDeep Learning Realm For Geophysics: Seismic Acquisition, Processing, Interpretation, and InversionMAIKEL ANDRES VINCES MENDOZANo ratings yet
- The Assessment of Structured Light and Laser Scanning Methods in 3D Shape MeasurementsDocument8 pagesThe Assessment of Structured Light and Laser Scanning Methods in 3D Shape MeasurementsShadi AtriNo ratings yet
- Sensor Network LocalizationDocument47 pagesSensor Network Localizationgfdsal878No ratings yet
- A Simple, Low Cost, 3D Scanning System Using The Laser Light-Sectioning MethodDocument6 pagesA Simple, Low Cost, 3D Scanning System Using The Laser Light-Sectioning Methodsantoimam112No ratings yet
- Image Fusion Based On Wavelet and Curvelet Transform Using ANFIS AlgorithmDocument9 pagesImage Fusion Based On Wavelet and Curvelet Transform Using ANFIS AlgorithmInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Deep Learning Realm For Geophysics: Seismic Acquisition, Processing, Interpretation, and InversionDocument27 pagesDeep Learning Realm For Geophysics: Seismic Acquisition, Processing, Interpretation, and InversionMEME KHANNo ratings yet
- Generation of Computational Meshes From Mri and Ct-Scan DataDocument11 pagesGeneration of Computational Meshes From Mri and Ct-Scan DataJyda MatSochNo ratings yet
- Seminar ReportDocument36 pagesSeminar ReportMouni BoomiReddyMounika0% (2)
- High Speed High Dynamic Range 3D Shape Measuremente Based On Deep LearningDocument9 pagesHigh Speed High Dynamic Range 3D Shape Measuremente Based On Deep LearningHarre Bams Ayma ArandaNo ratings yet
- Full Waveform Analysis For Long Range 3D Imaging Laser RadarDocument12 pagesFull Waveform Analysis For Long Range 3D Imaging Laser RadarmcgagliardiNo ratings yet
- Liu 2017Document15 pagesLiu 2017AzizNo ratings yet
- Remote Sensing: Deep Learning For SAR Image DespecklingDocument20 pagesRemote Sensing: Deep Learning For SAR Image DespecklingCan AtalayNo ratings yet
- Weathered CleanerDocument2 pagesWeathered Cleanerabdalla el-saadaneyNo ratings yet
- Kaggle State of Machine Learning and Data Science 2020 PDFDocument30 pagesKaggle State of Machine Learning and Data Science 2020 PDFDiego EulaNo ratings yet
- Chapter 4: Jacobians, Velocity, and Static Force: RoboticsDocument23 pagesChapter 4: Jacobians, Velocity, and Static Force: Roboticsbình nghuyễnNo ratings yet
- Viberg Boot Spring 2024Document4 pagesViberg Boot Spring 2024zixelNo ratings yet
- Pso PosterDocument1 pagePso PosterGeorge IskanderNo ratings yet
- Digital Image Processing: National University of Sciences and Technology (NUST)Document55 pagesDigital Image Processing: National University of Sciences and Technology (NUST)Muhammad Tehsin RashadNo ratings yet
- Parametric ArchitectureDocument35 pagesParametric ArchitectureGudiya PanditNo ratings yet
- As 4459.5-1999 Methods of Sampling and Testing Ceramic Tiles Determination of Impact Resistance by MeasuremenDocument4 pagesAs 4459.5-1999 Methods of Sampling and Testing Ceramic Tiles Determination of Impact Resistance by MeasuremenSAI Global - APACNo ratings yet
- Botnet Detection Techniques - An Analysis: Jwala Sharma, Samarjeet BorahDocument8 pagesBotnet Detection Techniques - An Analysis: Jwala Sharma, Samarjeet Borahamal shormanNo ratings yet
- Company Profile EditedDocument17 pagesCompany Profile EditedZee De Vera LaderasNo ratings yet
- Cisco APIC REST API Configuration Guide 42xDocument56 pagesCisco APIC REST API Configuration Guide 42xTrương Văn HuyNo ratings yet
- MF5LS MH5LF InstructionDocument74 pagesMF5LS MH5LF InstructionMạh PhanNo ratings yet
- Surigao State College of Technology: LearningDocument11 pagesSurigao State College of Technology: LearningJamesula DetherNo ratings yet
- Cism Ilt Module1Document51 pagesCism Ilt Module1Deshwaran vasuthevanNo ratings yet
- Iaeme Publicaion Call For Paper October 2021Document15 pagesIaeme Publicaion Call For Paper October 2021IAEME PublicationNo ratings yet
- Standard Hooks Card-ASTM PDFDocument2 pagesStandard Hooks Card-ASTM PDFKhris SamejonNo ratings yet
- Lab 5 - Sound Level TestDocument3 pagesLab 5 - Sound Level TestKelvin YipNo ratings yet
- DBMS Performance Subject Area No. 6 Master's Reviews Company Evaluation 1Document5 pagesDBMS Performance Subject Area No. 6 Master's Reviews Company Evaluation 1Harman SandhuNo ratings yet
- Bachelor Thesis Cloud Computing PDFDocument4 pagesBachelor Thesis Cloud Computing PDFcatherineaguirresaltlakecity100% (2)
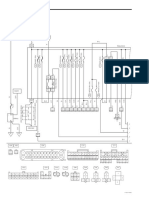
- Diagrama 1kr Toyota Fusiblera Star Alt Motor DLCDocument14 pagesDiagrama 1kr Toyota Fusiblera Star Alt Motor DLCjuancareaga754No ratings yet
- Finite Impulse Response (FIR) FiltersDocument39 pagesFinite Impulse Response (FIR) FiltersMike Vincent RagayNo ratings yet
- Oracle 11g New Tuning Features: Donald K. BurlesonDocument36 pagesOracle 11g New Tuning Features: Donald K. BurlesonSreekar PamuNo ratings yet
- 4 FHPL 07072021 ReimbursemetDocument3 pages4 FHPL 07072021 ReimbursemetHOD (MVGR Civil)No ratings yet
- CS8092 SyllabusDocument2 pagesCS8092 Syllabussathyaaaaa1No ratings yet
- Sustainable and Responsible Investment: Key FeaturesDocument2 pagesSustainable and Responsible Investment: Key FeaturesCharlie DalzielNo ratings yet
- S BT HL Data Sheet Technical Information ASSET DOC 18789718Document18 pagesS BT HL Data Sheet Technical Information ASSET DOC 18789718fwfchmielewskiNo ratings yet
- Manual Quickhitch: Issue 1Document23 pagesManual Quickhitch: Issue 1MMM-MMMNo ratings yet
- DL850 DiagnosticsDocument20 pagesDL850 DiagnosticssonotiumNo ratings yet
- MachineDocument12 pagesMachinemanuelaristotleNo ratings yet
- World-Leading CAM Software For Production MachiningDocument11 pagesWorld-Leading CAM Software For Production MachiningpatgigNo ratings yet