Download as doc, pdf, or txt
You might also like
- HP Lab Report TrifilarDocument11 pagesHP Lab Report TrifilarHorciuxes IraniNo ratings yet
- Bifilar Determination of EarthDocument9 pagesBifilar Determination of EarthSehran AmjadNo ratings yet
- Bifilar SuspensionDocument6 pagesBifilar Suspensionyogesh_b_kNo ratings yet
- Lab Manual Combined)Document16 pagesLab Manual Combined)Chris Thye0% (1)
- 13S1 FE1073 M1-Work and EnergyDocument10 pages13S1 FE1073 M1-Work and Energyglenlcy0% (2)
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesFrom EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesRating: 5 out of 5 stars5/5 (3)
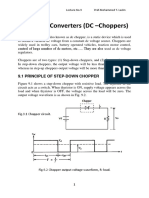
- DC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperDocument18 pagesDC-DC Converters (DC - Choppers) : 9.1 Principle of Step Down ChopperSaif UddinNo ratings yet
- Pendulum Periods and Gravitational AccelerationDocument10 pagesPendulum Periods and Gravitational AccelerationAmeerMuaviaNo ratings yet
- Pendulum Periods and Gravitational AccelerationDocument11 pagesPendulum Periods and Gravitational AccelerationAmeerMuaviaNo ratings yet
- Trifilar Experiment: Submitted by Prakhar Gupta 2008UME139 M2Document11 pagesTrifilar Experiment: Submitted by Prakhar Gupta 2008UME139 M2HLMOPTUW0% (1)
- T L T L G: Experiment E4Document4 pagesT L T L G: Experiment E4Yuv RajNo ratings yet
- ExperimentDocument9 pagesExperimentMajdy gamingNo ratings yet
- Lab Sheet Trif SuspensionDocument4 pagesLab Sheet Trif SuspensionHUMAID SIDDIQUINo ratings yet
- MECE222 - Dynamics - Rolling DiscDocument19 pagesMECE222 - Dynamics - Rolling DiscmakoNo ratings yet
- Experiment - 4 - Bar Pendulum and Kater's PendulumDocument20 pagesExperiment - 4 - Bar Pendulum and Kater's PendulumDev HalvawalaNo ratings yet
- General Physics Lab ManualDocument39 pagesGeneral Physics Lab ManualWe SupportNo ratings yet
- Dynamicstrifilar Suspension 2 JKCRECDocument16 pagesDynamicstrifilar Suspension 2 JKCRECtoecrusher0% (1)
- Bdu II Physics Lab BookDocument57 pagesBdu II Physics Lab BookMr V3NOMNo ratings yet
- IntroductionDocument9 pagesIntroductionJM085No ratings yet
- This Exam Is Formed of Three Exercises in Four Pages. The Use of Non-Programmable Calculators Is RecommendedDocument6 pagesThis Exam Is Formed of Three Exercises in Four Pages. The Use of Non-Programmable Calculators Is Recommendedincandescentglow96No ratings yet
- Phy Lab PDFDocument67 pagesPhy Lab PDFAbhayNo ratings yet
- Expt2 Simplependulum PDFDocument7 pagesExpt2 Simplependulum PDFSharifuddin RumanNo ratings yet
- Determination of Acceleration Due To Gravity CompressDocument8 pagesDetermination of Acceleration Due To Gravity Compressشەیدایانی قورئانNo ratings yet
- Phys4 Chap1 WaveDocument65 pagesPhys4 Chap1 WaveDũng Phùng100% (1)
- Rotational Dynamics-03-Subjective SolvedDocument16 pagesRotational Dynamics-03-Subjective SolvedRaju SinghNo ratings yet
- Types of PendulumDocument5 pagesTypes of PendulumExpertsmindEdu100% (2)
- .Trashed-1644798227-39 SESSIONDocument5 pages.Trashed-1644798227-39 SESSIONRakeshNo ratings yet
- The Simple Pendulum: ObjectiveDocument5 pagesThe Simple Pendulum: ObjectiveAlexo ManNo ratings yet
- Moment of Inertia of A Tennis BallDocument8 pagesMoment of Inertia of A Tennis BallShaheer ShahzadNo ratings yet
- Lab 5Document5 pagesLab 5Tawsif ahmedNo ratings yet
- m3 - 1 M3 - 1 B) Main BodyDocument5 pagesm3 - 1 M3 - 1 B) Main Bodyapi-3744430100% (1)
- Experiment 4 Pendulum Oscillation With PC Interface: Principle and TaskDocument5 pagesExperiment 4 Pendulum Oscillation With PC Interface: Principle and TaskNguyễn Đức MạnhNo ratings yet
- DownloadDocument8 pagesDownloadDivya HMNo ratings yet
- Bar PendulumDocument7 pagesBar PendulumAmit DipankarNo ratings yet
- KOM Expt. No. 2Document5 pagesKOM Expt. No. 2Vatsal PatelNo ratings yet
- Physics Project Class 12Document13 pagesPhysics Project Class 12vinayNo ratings yet
- M1 Work and Energy (FE1073)Document10 pagesM1 Work and Energy (FE1073)Lim RufeiNo ratings yet
- FE1073 M1 Work and Energy Manual PDFDocument10 pagesFE1073 M1 Work and Energy Manual PDFBonza RatashNo ratings yet
- Experimental Title: Bifilar and Trifilar SuspensionsDocument34 pagesExperimental Title: Bifilar and Trifilar SuspensionsLue niNo ratings yet
- Moment of Inertia of A Flywheel: ParatusDocument9 pagesMoment of Inertia of A Flywheel: ParatusAamir IqbalNo ratings yet
- JLExp 006Document6 pagesJLExp 006Prashant A UNo ratings yet
- 01 Measurements Tutorial (Solution)Document12 pages01 Measurements Tutorial (Solution)Wee Chee LimNo ratings yet
- Exercise 1 (6 Points) Sodium Vapor LampDocument8 pagesExercise 1 (6 Points) Sodium Vapor LampAli A RammalNo ratings yet
- L15 PDFDocument15 pagesL15 PDFlesNo ratings yet
- Osilasi (Pert.1)Document35 pagesOsilasi (Pert.1)tamvanbabang214No ratings yet
- Chapter - 8 - Simple Harmonic MotionDocument12 pagesChapter - 8 - Simple Harmonic MotionMohammed Aftab Ahmed0% (1)
- Microwave Spectroscopy BSc-Lect-2-1Document43 pagesMicrowave Spectroscopy BSc-Lect-2-1Varun JogiNo ratings yet
- Measurement of G by Simple PendulumDocument11 pagesMeasurement of G by Simple PendulumKomang Gde Yudi Arsana100% (1)
- Exercise C2 Earthquake Analysis Using FEM: Authors: Submitted (Date) : 2019-10-6 Approved by (Name/date)Document7 pagesExercise C2 Earthquake Analysis Using FEM: Authors: Submitted (Date) : 2019-10-6 Approved by (Name/date)xiaoqi wangNo ratings yet
- EXP2Document10 pagesEXP2hello123No ratings yet
- RBK Mechanical Blabk BoxDocument9 pagesRBK Mechanical Blabk BoxNam KolyaNo ratings yet
- Dynamics B.tech 2nd YearDocument2 pagesDynamics B.tech 2nd YearRishi Kumar0% (1)
- Questions 11Document7 pagesQuestions 11Thiago SantosNo ratings yet
- Question 41Document7 pagesQuestion 41Skye JabaNo ratings yet
- FE1071 M1 Moment of Inertia in Rigid Body MotionDocument12 pagesFE1071 M1 Moment of Inertia in Rigid Body Motionapi-3744430100% (1)
- Determining The Horizontal Component of EarthDocument11 pagesDetermining The Horizontal Component of EarthBhavadharani BalajiNo ratings yet
- FormalDocument4 pagesFormalapi-3744430100% (1)
- Microwave Spectroscopy BSC Lect 2Document43 pagesMicrowave Spectroscopy BSC Lect 2anon_916856395100% (1)
- Physics: System of Particles & Rotational Motion: Dynamics of Rotational MotionDocument4 pagesPhysics: System of Particles & Rotational Motion: Dynamics of Rotational MotionShashi Shekhar TripathiNo ratings yet
- GyroscopeDocument7 pagesGyroscopevijay2293No ratings yet
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Introduction and Basic ConceptsDocument35 pagesIntroduction and Basic ConceptsAbdul Hasib Hasan ZayedNo ratings yet
- Chapter 8Document71 pagesChapter 8Abdul Hasib Hasan ZayedNo ratings yet
- Chapter 9Document57 pagesChapter 9Abdul Hasib Hasan ZayedNo ratings yet
- Chapter 7Document59 pagesChapter 7Abdul Hasib Hasan ZayedNo ratings yet
- Beer Johnson Chapter 2 (10th Ed) Marked.Document20 pagesBeer Johnson Chapter 2 (10th Ed) Marked.Abdul Hasib Hasan ZayedNo ratings yet
- Chapter 12 - Atoms-Saju-Hsslive PDFDocument9 pagesChapter 12 - Atoms-Saju-Hsslive PDFAmiNo ratings yet
- 4.maxwell Equations (Derivation)Document7 pages4.maxwell Equations (Derivation)Dawa PenjorNo ratings yet
- Irodov 106-235 PDFDocument131 pagesIrodov 106-235 PDFJohn ThomasNo ratings yet
- Powder Technology: T.M. Chitu, D. Oulahna, M. HematiDocument10 pagesPowder Technology: T.M. Chitu, D. Oulahna, M. HematiKarla HuamancajaNo ratings yet
- Portable Earthing ChecklistDocument3 pagesPortable Earthing ChecklistTwin BullsNo ratings yet
- Circuits 2 Lab Report No. 7Document4 pagesCircuits 2 Lab Report No. 7Carlo CaniedoNo ratings yet
- High Voltage PCDesignDocument36 pagesHigh Voltage PCDesignjagadees21No ratings yet
- Baldor VS1ST ManualDocument70 pagesBaldor VS1ST ManualHumberto Morales SuarezNo ratings yet
- CBSE Class 9 Science Model Paper 2021 PatternDocument5 pagesCBSE Class 9 Science Model Paper 2021 PatternAryaman TiwariNo ratings yet
- Cher N SimonsDocument3 pagesCher N Simonsericp719No ratings yet
- Simple Arduino Inverter CircuitDocument11 pagesSimple Arduino Inverter CircuitPramilla100% (1)
- Sie Bro ZP d43 PDFDocument4 pagesSie Bro ZP d43 PDFAsterix IDNo ratings yet
- Chapter-41 Electromagnetic WavesDocument17 pagesChapter-41 Electromagnetic Wavesökkeş kurtNo ratings yet
- Table 1. Power Quality Problems and Their CausesDocument27 pagesTable 1. Power Quality Problems and Their CausesnidhiNo ratings yet
- Gss 220 KVDocument21 pagesGss 220 KVaniljangidNo ratings yet
- C 15Document2 pagesC 15mohanNo ratings yet
- Transportation Engineering Chapters 1 3Document90 pagesTransportation Engineering Chapters 1 3Cristian Paul Calaque SiocoNo ratings yet
- Electric Compressor With High-Speed Brushless DC Motor: Development SuperchargingDocument4 pagesElectric Compressor With High-Speed Brushless DC Motor: Development SuperchargingJohn XaviNo ratings yet
- The Roles of Power Electronics in Renewable Energy DeploymentDocument27 pagesThe Roles of Power Electronics in Renewable Energy DeploymentaliNo ratings yet
- H1 Physics J2 CT1 2013 Paper 2 SolutionsDocument4 pagesH1 Physics J2 CT1 2013 Paper 2 SolutionsMichael LeungNo ratings yet
- Performance Analysis of Three Phase Induction Motor Under Balance & Unbalance Voltage ConditionsDocument5 pagesPerformance Analysis of Three Phase Induction Motor Under Balance & Unbalance Voltage ConditionsAishwarya RaiNo ratings yet
- Admittance of A Circular Loop Antenna Over A Lossy Dielectric PlaneDocument10 pagesAdmittance of A Circular Loop Antenna Over A Lossy Dielectric PlaneOsama Badr AldeenNo ratings yet
- Theoretical Framework of Research PaperDocument8 pagesTheoretical Framework of Research Paperafnhemzabfueaa100% (1)
- Vandegraff GeneratorDocument24 pagesVandegraff GeneratorVinayKumarNo ratings yet
- Technical Manual: Power Limit & Monitor Board P/N: C09G0000Document14 pagesTechnical Manual: Power Limit & Monitor Board P/N: C09G0000Santiago IpialesNo ratings yet
- Magnetism Experiment Kit by Junior ScientistDocument12 pagesMagnetism Experiment Kit by Junior ScientistGopi ChandNo ratings yet
- Questions, Numerical Problems, Examples (Part-1)Document32 pagesQuestions, Numerical Problems, Examples (Part-1)mushtaq ahmadNo ratings yet
- Magnetic Particle NDT MT and MPIDocument3 pagesMagnetic Particle NDT MT and MPIsheikbba100% (1)
- TCN2122 Topic 2Document20 pagesTCN2122 Topic 2Usman SuhaimyNo ratings yet