Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5823)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (898)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (349)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (823)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (403)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- LINCS TableDocument1 pageLINCS TableMohamed NaderNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Diagrama Electrico 320c PDFDocument2 pagesDiagrama Electrico 320c PDFPutra Jawa100% (2)
- Cat 3512B/3516BDocument2 pagesCat 3512B/3516Bmohammad hazbehzad100% (2)
- Product Data Sheet: Circuit Breaker Compact NS2000N - 2000 A - 3 Poles - Fixed - Without Trip UnitDocument2 pagesProduct Data Sheet: Circuit Breaker Compact NS2000N - 2000 A - 3 Poles - Fixed - Without Trip UnitDelfin Vargas100% (1)
- First SessionDocument29 pagesFirst SessionMohamed NaderNo ratings yet
- LINCS TableDocument1 pageLINCS TableMohamed NaderNo ratings yet
- Bewley's Lattice Diagram Is A Graphical Method That Has Been Widely Used For Determining The Value of The Travelling Wave in Transient AnalysisDocument2 pagesBewley's Lattice Diagram Is A Graphical Method That Has Been Widely Used For Determining The Value of The Travelling Wave in Transient AnalysisMohamed NaderNo ratings yet
- Yasser Elfahham, PHD: Chapter (1) IntroductionDocument25 pagesYasser Elfahham, PHD: Chapter (1) IntroductionMohamed NaderNo ratings yet
- Learn Java Programming From Scratch - 1Document28 pagesLearn Java Programming From Scratch - 1Mohamed NaderNo ratings yet
- Object Oriented Programming - 1Document10 pagesObject Oriented Programming - 1Mohamed NaderNo ratings yet
- CT & PT CalculationsDocument10 pagesCT & PT Calculationssrigirisetty208100% (4)
- Itm Schneider NS 800aDocument3 pagesItm Schneider NS 800aJean Carlos VeraNo ratings yet
- Ist125r01 4858Document116 pagesIst125r01 4858Raid AbdemezianeNo ratings yet
- Tig Inverter: Instruction ManualDocument12 pagesTig Inverter: Instruction ManualMuhammad ShakeelNo ratings yet
- Competence 2 ETO (Electrical)Document38 pagesCompetence 2 ETO (Electrical)Naung LattNo ratings yet
- Final PrepDocument4 pagesFinal PrepMUJAHIDNo ratings yet
- SIMPLEXA 601 - DatasheetDocument4 pagesSIMPLEXA 601 - DatasheetLuis Aguilar EnriquezNo ratings yet
- Supertex Merchandising Co.,Ltd 9566 Alliance Audit Report Ear 4508 April...Document29 pagesSupertex Merchandising Co.,Ltd 9566 Alliance Audit Report Ear 4508 April...Ekhlas SayeedNo ratings yet
- 105k 250v CeramicDocument20 pages105k 250v CeramicOVALLEPANo ratings yet
- DB-PRD-F-01-00 - Route Card - Weapon Control Panel IntegrationDocument1 pageDB-PRD-F-01-00 - Route Card - Weapon Control Panel IntegrationaartiNo ratings yet
- Electrical ConceptsDocument34 pagesElectrical ConceptsTeddy GutayNo ratings yet
- Actuador VC On-Off HoneywellDocument4 pagesActuador VC On-Off HoneywellGrafter TermocuplasNo ratings yet
- 5v RegulatorDocument4 pages5v RegulatorPianist AliNo ratings yet
- 24 KV VT CatalogueDocument6 pages24 KV VT CatalogueLê Minh ThanhNo ratings yet
- Igct en 0805119Document2 pagesIgct en 0805119S Sivarao JonnalagaddaNo ratings yet
- LT3751Document34 pagesLT3751Catalin NeacsuNo ratings yet
- TAS-331DG Data Sheet 4921220036 UKDocument4 pagesTAS-331DG Data Sheet 4921220036 UKRicardo NunesNo ratings yet
- LCM500 Training Customer (Rev. PW)Document73 pagesLCM500 Training Customer (Rev. PW)Har Listrik Asam asam100% (1)
- MTL 7700 SeriesDocument17 pagesMTL 7700 Seriescuongphan123No ratings yet
- At8Psn/At8Pmn Series: Instruction ManualDocument1 pageAt8Psn/At8Pmn Series: Instruction ManualJohn GarnetNo ratings yet
- Definitions of Voltage Transformer ParametersDocument4 pagesDefinitions of Voltage Transformer ParametersEngr. AbdullahNo ratings yet
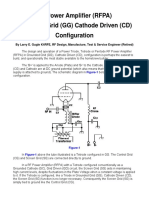
- RF Power Amplifier (RFPA) Grounded Grid (GG) Cathode Driven (CD) ConfigurationDocument14 pagesRF Power Amplifier (RFPA) Grounded Grid (GG) Cathode Driven (CD) ConfigurationAjvanhoe AjvanhoeNo ratings yet
- Unit-I 2Document22 pagesUnit-I 2Federico AldoNo ratings yet
- Motor Control CircuitDocument28 pagesMotor Control CircuitLuis Eduardo RibeiroNo ratings yet
- Flexible Drive Shaft and Brass TubeDocument9 pagesFlexible Drive Shaft and Brass TubeShajahan ShagulNo ratings yet
- STREETLIGHT 150 W 4000 K enDocument4 pagesSTREETLIGHT 150 W 4000 K enMohamedHussein MohamedHusseinNo ratings yet