Professional Documents
Culture Documents
H1-Automotive Control: Application Guideline Electrical Installation
H1-Automotive Control: Application Guideline Electrical Installation
Uploaded by
Wissem El'MissaouiOriginal Description:
Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
H1-Automotive Control: Application Guideline Electrical Installation
H1-Automotive Control: Application Guideline Electrical Installation
Uploaded by
Wissem El'MissaouiCopyright:
Available Formats
H1-Automotive Control
Application Guideline
Electrical Installation
DEUTSCH connector
CC1 DTM/12 pin
Battery (-) 1 CC1p01
Battery (+) 2 CC1p02
Sensor (+) 3 CC1p03 CC1p03
Motor RPM/Direction
Sensor (-) 4 CC1p04 CC1p04
Motor RPM Input (Frequency) 5 CC1p05
Forward Input (Digital) 6
CC1p06
A e.g.
Reverse Input (Digital) 7 B FNR Hand Brake
CC1p07
Sensor (+) 8 CC1p08
CC1p12
CNT Switch Seat-Switch
Sensor (-) 9 CC1p09
Drive Pedal Input (Analog-Nom) 10 Rv
CC1p08
Drive Pedal Input (Analog-Red) 11
CC1p10
Drive/Creep/Rocker
Neutral Input (Digital) 12 Pedal
CC1p11
Rv
Terminals CC1p09
Sensor (+)
DEUTSCH connector
CAN DTM/3 pin
Terminals
Sensor (-)
CAN High 1 CANp01
CAN Low 2 CANp02 CAN Bus
CAN Shield 3 CANp03
Terminals
Batt. (+)
DEUTSCH connector
PPC DTM/6 pin 3
CC3p01
Brake Reverse FNR in
Sensor A (+) 1
Light Motion Reverse
Analog Input A 2
Sensor A (-) 3
Sensor B (-) 4 CC3p02
Fault Reverse
Analog Input B 5 LED LED
Sensor B (+) 6
Vehicle-Speed-Dependent
Output-Signal
DEUTSCH connector CC3
PSC DTM/6 pin
DEUTSCH connector
DT04/2 pin
PWM C1 (+) 1 PSCp01
PWM C2 (+) 2 PSCp06 C1
Digital Output A1 (+) 3 PSCp03 1
PSCp02 Electronic Displacement
Digital Output A2 (-) 4 PSCp04 2
Control Pump
PWM C2 (-) 5 PSCp05 C2
PWM C1 (-) 6
PPUp03
Terminals
PPUp02 Pump RPM
DEUTSCH connector Batt. (-)
PPU DTM/3 pin
PPUp01
CC2p03
Sensor (+) 1 PPUp01
2-P
Pump RPM Input (Frequency) 2
CC2p03 Electronic Displacement
Sensor (-) 3 PPUp03
PROP
Control Motor
CC2p08
DEUTSCH connector
CC2 DTM/12 pin
BPD
CC2p04
Inch Input (Analog-Red) 1 CC2p01 Nominal
Mode Switch B
Mode Switch B Input (Digital-Nom) 2 CC2p02 1
Motor PROP/PCOR Driver 3 CC2p12
S1 2
Motor Direction Input (Analog) 4 Redundant
F1
Sensor (+) 5 CC2p05 Rv
CC2p05
Sensor (-) 6 CC2p06
CC2p07 Inch Pedal + Batt. -
Inch Input (Analog-Nom) 7
Motor BPD Driver 8
CC2p06
Rv 12/24VDC
Digital Output B2 (-) 9 Alternative Brake
Digital Output B1 (+) 10 Pressure Inch Sensor
Mode Switch A Input (Digital) 11
CC2p10
Mode Switch B Input (Digital-Red) 12
Reverse FNR in
Motion Reverse
CC2p09
Parking Brake FNR in Fault Forward
Brake Light Reverse LED LED 3
Brake
Light
Mode Switch A
CC2p11
70012798
Document designed by Sales Propel Europe
Contents
Overview 3
About this Document ....................................................................................................................... 3
Referenced Documentation ........................................................................................................... 3
Hydraulic Products ....................................................................................................................... 3
Electronic Products ...................................................................................................................... 3
Software Products ........................................................................................................................ 3
Concept and Function...................................................................................................................... 4
Benefits .................................................................................................................................................. 4
Driving Profiles.................................................................................................................................... 4
Advanced Control Functions ......................................................................................................... 4
Integrated Motor Controller ........................................................................................................... 5
Auxiliary Functions ............................................................................................................................ 5
Economic Features ............................................................................................................................ 5
CAN Options ........................................................................................................................................ 5
Functional Safety ............................................................................................................................... 5
Installation Features .......................................................................................................................... 5
System Diagram 6
Generic System Diagram ................................................................................................................. 6
Hydraulic System Diagram ............................................................................................................. 7
Service and Diagnostic Screens 8
General .................................................................................................................................................. 8
Sensor Connections 9
Generic Connection Diagram ........................................................................................................ 9
SIL2 System Requirements 10
Introduction ....................................................................................................................................... 10
General Sensor Requirements ..................................................................................................... 10
General Actuator Requirements ................................................................................................. 10
Digital Inputs 11
General ................................................................................................................................................ 11
Electronic switch/Controller output .......................................................................................... 11
FNR Switch ......................................................................................................................................... 12
Mode Switch A .................................................................................................................................. 12
Mode Switch B .................................................................................................................................. 12
Solutions for different Mode Switches ..................................................................................... 13
Analog Inputs 14
General Sensor Requirements ..................................................................................................... 14
Drive/Creep/Rocker & Inch Pedal ............................................................................................... 15
Pressure Inch Sensor ....................................................................................................................... 15
Analog Joysticks ............................................................................................................................... 16
Hydromotor-Direction-Sensor .................................................................................................... 16
Frequency Inputs 17
Hydromotor Speed Sensor ........................................................................................................... 17
Honeywell GTN 1Axxx Hydromotor Speed Sensor ............................................................. 18
Speed, Direction and Temperature Sensor ............................................................................. 19
Electrical Characteristics 20
Pin Configuration ............................................................................................................................. 20
Supply Characteristics .................................................................................................................... 22
I/O Characteristics ............................................................................................................................ 23
Digital Inputs ................................................................................................................................ 23
Analog Inputs ............................................................................................................................... 23
Frequency Input (Motor RPM) ................................................................................................ 23
Analog Input (Motor Direction) ............................................................................................. 23
PWM Output for Motor Displacement Control ................................................................. 23
Digital Outputs ............................................................................................................................ 23
Operating Characteristics 24
Temperature Ratings ...................................................................................................................... 24
Protection Characteristics ............................................................................................................. 24
General Wiring Guidelines 25
CAN bus wiring ................................................................................................................................. 25
CAN Adapter Cable ......................................................................................................................... 26
Machine Wiring Guidelines .......................................................................................................... 27
Safety Precautions 28
Safety Precautions ........................................................................................................................... 28
Revision History ........................................................................................................................... 29
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 2
Overview
About this Document
This document provides information about the Electrical installation of Integrated
Automotive Control System. In addition, it is a reference tool for vehicle OEM design,
engineering, and service personnel.
This document is one of several sources of technical information for the control
system. Other sources of technical information include the referenced documentation
listed below.
Referenced Documentation
Hydraulic Products
H1P045/053 Single, Technical Information, 11063344
H1P078 Single, Technical Information, 11062169
H1P089/100 Single, Technical Information, 11069970
H1P115/130 Single, Technical Information, 11063346
H1P115/130 Single, Technical Information, 11063347
Electronic Products
Speed and Temperature Sensor, 11046759
KPP Pulse Pickup Speed Sensors, 11029257
Pressure Sensor MBS1250, 11058299
JS6000 Joystick, 520L0760
Graphical Terminals and Displays, 11035455
Software Products
PLUS+1 Service Tool User Manual, 520L0899
H1 Automotive Control Service Interface User Manual, 70012797
Recommended System Start-up Procedures Technical Information, 11010667
Technical Information for PLUS+1 Controller, 520L0719
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 3
Overview
Concept and Function
The Sauer-Danfoss integrated automotive control system is designed for pumps with
NFPE (Non-Feedback Proportional Electric) Control. The flexible system
configuration allows use of a wide range of hydrostatic pumps and motor
combinations out of the Sauer-Danfoss product portfolio.
The integrated automotive control combines enhanced control performance with a
flexible control scheme. The controller converts engine speed signal to an automotive
drive signal to control the proportional axial piston pump. It is designed to control a
two position controlled motor or an electric proportional control for a bent axis motor.
With easily changeable control parameters, it is possible to tailor the vehicle's driving
behavior to the individual requirements of the machine.
The combination of state of the art technology of embedded digital electronic control
and Sauer-Danfoss proven axial piston pump technology opens a wide range of
application possibilities.
Benefits
Sauer-Danfoss offers years of application expertise in a fully integrated, pre-tested
Automotive Control System solution that’s ready to be tailored to your vehicle
requirements. The integrated automotive control system is a complete vehicle
transmission solution offering benefits including:
Reduced OEM time-to-market for new vehicles and model variants
Reduced system development, vehicle qualification, and certification expense
State-of-the-art system level functional safety design
Enhanced, flexible functionality through embedded intelligent electronics.
Driving Profiles
Four selectable system modes, selectable via switch
Independent curves and settings for forward and reverse (4 x 2 curves)
Switch selectable between automotive and engine speed independent driving
modes
Engine speed independent drive modes for sweepers, snow blowers (non-
automotive mode)
Load independent drive modes for off road applications (non-automotive for
rollers and forestry machines)
Load independent swash-plate control via pump swash-plate angle sensor to
achieve EDC behavior
Creep speed mode (slow shunting, digging operation, etc)
Constant speed mode (sweepers, snow-blowers, etc)
Integrated vehicle speed limiter function
Advanced Control Functions
Inch function without separate control valve
Integrated temperature sensor for:
− Hydraulic system overheat protection
− Low temperature pump flow limitation
− Compensation of oil viscosity changes if using (radial piston motors, etc)
Configurable engine antistall protection
Engine overspeed protection while inching
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 4
Overview
Integrated Motor Controller
Integrated electric motor control for:
− Proportional, variable PCOR or two position motor controls
− Brake pressure defeat, depending on the FNR position or the real vehicle
driving direction
− Initial breakaway motor torque override
Separate overspeed protection for the hydrostatic motor.
Auxiliary Functions
Four auxiliary outputs for:
− Intelligent brake light control
− Automatic park brake function
− Vehicle speed dependent output to activate (load stabilizer, warning lights, etc)
− Reverse buzzer controlled by FNR or reverse driving
− System status lamp (fault detection for pump solenoids).
Economic Features
Technology and enabler for economic driving and fuel savings
Easy combination options to other components of the PLUS+1 Family.
CAN Options
J1939 protocol compliant CAN messages from/to an engine controller
J1939-CAN Shared Engine Speed Control with Safety Monitoring. The H1-AC
generates based on e.g. a drive pedal a desired engine speed.
J1939-CAN Subsystem-Data Interface. The software application can receive CAN
information from the vehicle system (e.g. Drive Pedal, Joystick, FNR).
Functional Safety
The H1-AC Hard and Software fulfils the requirements of the guidelines accordant
to IEC 61508, SIL2 (Functional safety). Proved by the certification body TÜV NORD,
Hamburg.
Safety controlled Vehicle Start-Protection (engine speed check, battery check and
FNR must be in neutral, etc)
Operator presence detection
Vehicle speed dependent direction change lock
Brake test mode for roller applications to fulfill EN500-4.
Sauer-Danfoss strongly recommends that the OEM perform a system level Failure
Mode Effects Analysis (FMEA)
Installation Features
Factory calibration for hysteresis compensation.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 5
System Diagram
Generic System Diagram
Note: Swashplate sensor included (Option)
Temperature sensor on board
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 6
System Diagram
Hydraulic System Diagram
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 7
Service and Diagnostic Screens
General
Optional the PLUS+1 GUIDE Service Tool can be used to modify and tune the
individual machine settings.
The PLUS+1 GUIDE Service Tool has 2 basic screen areas:
1. Log Functions:
These screens are showing important run data of the transmission system.
They are very useful for understanding the system behavior, for tuning the
system and for trouble-shooting. These data can also be logged and stored
on the hard disk of a laptop for documentation or discussion purposes.
2. Parameter Functions:
These screens are showing the possible system parameter for configuring
and tuning a transmission system according to customer requirements.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 8
Sensor Connections
Generic Connection Diagram
Note: Swashplate sensor included (Option)
Temperature sensor on board
DEUTSCH connector
CC1 DTM/12 pin
Battery (-) 1 CC1p01
Battery (+) 2 CC1p02
Sensor (+) 3 CC1p03 CC1p03
Motor RPM/Direction
Sensor (-) 4 CC1p04 CC1p04
Motor RPM Input (Frequency) 5 CC1p05
Forward Input (Digital) 6
CC1p06
A e.g.
Reverse Input (Digital) 7
CC1p07
B FNR Hand Brake
Sensor (+) 8 CC1p08
CC1p12
CNT Switch Seat-Switch
Sensor (-) 9 CC1p09
Drive Pedal Input (Analog-Nom) 10 Rv
CC1p08
Drive Pedal Input (Analog-Red) 11
CC1p10
Drive/Creep/Rocker
Neutral Input (Digital) 12
CC1p11
Pedal
Rv
Terminals CC1p09
Sensor (+)
DEUTSCH connector
CAN DTM/3 pin
Terminals
Sensor (-)
CAN High 1 CANp01
CAN Low 2 CANp02 CAN Bus
CAN Shield 3 CANp03
Terminals
Batt. (+)
DEUTSCH connector
PPC DTM/6 pin 3
CC3p01
Brake Reverse FNR in
Sensor A (+) 1
Light Motion Reverse
Analog Input A 2
Sensor A (-) 3
Sensor B (-) 4 CC3p02
Fault Reverse
Analog Input B 5 LED LED
Sensor B (+) 6
Vehicle-Speed-Dependent
Output-Signal
DEUTSCH connector CC3
PSC DTM/6 pin
DEUTSCH connector
DT04/2 pin
PWM C1 (+) 1 PSCp01
PWM C2 (+) 2 PSCp06 C1
Digital Output A1 (+) 3 PSCp03 1
PSCp02 Electronic Displacement
Digital Output A2 (-) 4 PSCp04 2
Control Pump
PWM C2 (-) 5 PSCp05 C2
PWM C1 (-) 6
PPUp03
Terminals
PPUp02 Pump RPM
DEUTSCH connector Batt. (-)
PPU DTM/3 pin
PPUp01
CC2p03
Sensor (+) 1 PPUp01
2-P
Pump RPM Input (Frequency) 2
CC2p03 Electronic Displacement
Sensor (-) 3 PPUp03
PROP
Control Motor
CC2p08
DEUTSCH connector
CC2 DTM/12 pin
BPD
CC2p04
Inch Input (Analog-Red) 1 CC2p01 Nominal
Mode Switch B
Mode Switch B Input (Digital-Nom) 2 CC2p02 1
Motor PROP/PCOR Driver 3 CC2p12
S1 2
Motor Direction Input (Analog) 4 Redundant
F1
Sensor (+) 5 CC2p05 Rv
CC2p05
Sensor (-) 6 CC2p06
CC2p07 Inch Pedal + Batt. -
Inch Input (Analog-Nom) 7
Motor BPD Driver 8
CC2p06
Rv
12/24VDC
Digital Output B2 (-) 9 Alternative Brake
Digital Output B1 (+) 10 Pressure Inch Sensor
Mode Switch A Input (Digital) 11
CC2p10
Mode Switch B Input (Digital-Red) 12
Reverse FNR in
Motion Reverse
CC2p09
Parking Brake FNR in Fault Forward
Brake Light Reverse LED LED 3
Brake
Light
CC2p11
Mode Switch A
70012798
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 9
SIL2 System Requirements
Introduction
During several System- and Sub-System-FMEA analysis (Failure Modes and Effects
Analysis), Sauer-Danfoss has identified the following requirements for Customer-
Sensors and Customer-Actuators to satisfy the requirements of a SIL2 certification on
vehicle system level.
The pump valves, the pump rpm sensor, the wiring-harness and the integrated swash
plate angle sensor are part of the SIL2 certification of the H1-AC.
General Sensor Requirements
CAN Input Signals are not certifiable according SIL2 of IEC 61508.
The J1939 CAN Protocol did not provide the safety relevant features.
Sauer-Danfoss is not responsible for the function and safety of third-party sensors and
actors which are connected to the AC!
The AC Control is designed to connect different kinds of sensors:
the pump & motor rpm and direction signals are based on the 5V Sensor supply
the digital inputs (switches) are based on the supply voltage (12/24V)
The high and low input signals are expected in a “band” which can be individually
adjusted to the demands.
For more information please refer below or to the Service Interface User Manual
General Actuator Requirements
Parking Brake, Brake Light Closed-Loop, FNR in Reverse & Reverse Motion have to
be connected in closed-loop current control
Motor Displacement and Break-Pressure-Defeat Valve are supplied in open loop
It is not allowed to overload the hardware outputs
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 10
Digital Inputs
General
The digital inputs must supplied by battery voltage, independent if using a held or
momentary switch.
Electronic switch/Controller output
If using an electronic switch or output signal of a separate controller, it is required to
supply the right signal level. Electronic outputs can have a leakage current which can
lead into bad signals.
If using a PULS+1 controller output the following configuration is a must:
DOUT
Pin Configuration=0 (Push/Pull Output)
All other output configurations like PWM, open collector, open source etc. are NOT
allowed.
For further information please refer to the Technical Information for PLUS+1
Controller 520L0719.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 11
Digital Inputs
FNR Switch
F
CC1p06
CC1p12 N + Battery
CC1p07 R Supply
For a SIL2 certification the following settings are required:
3-Layer switch with held Signal
Separate output signals for FORWARD, NEUTRAL and REVERSE indication as input
signals of the AC connector pins for CC1p06, CC1p07 and CC1p12.
Switch has to be supplied by Battery voltage
Switch needs to be compliant to the input resistance of the digital input
Gold-Plated contacts are recommended
Input Selector Configuration:
FNR-Source: FNR Signal from digital inputs [Parameter 807]
FNR-Signal Interpretation: F or R or N held (continuous signal) [Parameter 897]
If no SIL2 certification is required, the following settings are possible:
2-Layer switch for FORWARD and REVERSE minimum
FNR-Source: FNR Signal from digital inputs on via CAN Bus
FNR-Signal Interpretation: held or momentary
Mode Switch A
Mode Switch A
For a SIL2 certification the following settings are required:
Switch has to be supplied by Battery voltage
Switch needs to be compliant to the input resistance of the digital input
Gold-Plated contacts are recommended
If no SIL2 certification is required, the following setting is possible:
Mode Switch Signal via CAN Bus
Mode Switch B
Nominal
Mode Switch B
Redundant
For a SIL2 certification the following settings are required:
Switching logic has to be diverse redundant (opening and closing in parallel)
Switch has to be supplied by Battery voltage
Switch needs to be compliant to the input resistance of the digital input
Gold-Plated contacts are recommended
Input Selector Configuration
If the system mode with this digital input changes between Automotive/Creep-
Automotive or Non-Automotive, it is mandatory, to configure the parameter
“Mode Switch B Redundant”
If no SIL2 certification is required, the following settings are possible:
Switching logic not redundant (only closing contact) possible.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 12
Digital Inputs
Solutions for different Mode Switches
There are different solutions for the wiring of Mode Switches possible. Enclosed you
will find some sample circuits.
Solution with 4 position switch
Battery +
Mode Switch A Input CC2p12
Switch
1 – Automotive (Transport)
2 – Automotive (Work)
3 – Creep-Automotive (Work)
4 – Non-Automotive (Sweeper)
Mode Switch B Input (Nominal) CC2p02
Mode Switch B Input (Redundant) CC2p11
Solution with Joystick (2-position) and 2 separate Switches
Battery +
Mode Switch A Input CC2p12
Joystick Switch
Switch open – Mode 1 or 2
open – Mode 3 closed – Mode 3 or 4
closed – Mode 4
Mode Switch B Input (Nominal) CC2p02
Mode Switch B Input (Redundant) CC2p11
Switch
open – Mode 1
closed – Mode 2
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 13
Analog Inputs
General Sensor Requirements
Sensor must be supplied with AC sensor supply voltage and must not exceed the
max output current (overload)
If an analog sensor (potentiometer) is used, it should have a resistance value of
> 1kΩ and < 10kΩ.
The voltage range of the output signals must not be lower than 5% and not higher
than 95% of sensor voltage. Upper and lower voltage limits to sensor supply are
requested for wire-fault detection.
To provide an open lead and short-cut detection it is required to use series
resistors. The resistor value has to be approximately 7% of the poti resistance
value.
The voltage of the input must increase when the actuator is operated. For SIL2
certification some sensor must have a “Dual redundant Output”.
Poti resistance Rv
1 kΩ 68 Ω
5 kΩ 330 Ω
10 kΩ 680 Ω
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 14
Analog Inputs
Drive/Creep/Rocker & Inch Pedal
Rv
Sensor supply
Nominal
Rv
Rv
Redundant
Ground
Rv
For a SIL2 certification the following settings are required:
Analog sensor must have a dual output (e.g. two independent potentiometers).
This sensor must produce two electrically independent output signals that are in
direct correlation with each other.
The first output signal is used as the source of pedal position signal information
and the second output signal is used for diagnostic purposes.
In case of an internal detected error, the sensor output signal has to be clamped by
the sensor itself to sensor supply voltage. This feature enables the software
application to recognize this failure.
The voltage range of the output signals have to be in the allowed input range of
the analog inputs
If no SIL2 certification is required, the following settings are possible:
A single output (not redundant) is possible
Pressure Inch Sensor
CC2p05
CC2p07
CC2p06
Alternative Brake
Pressure Inch Sensor
For a SIL2 certification the following settings are required:
For the pressure inch sensor a redundant inch signal is not needed. A Single
output signal is sufficient, because the redundancy is here given by the hydraulic
brake system and the direct measurement of the hydraulic braking pressure. The
inch function is only supporting the vehicle brake system to prevent driving
against the brakes.
The voltage range of the output signals must not be lower than 5% and not higher
than 95% of sensor voltage.
Upper and lower voltage limits to sensor supply are requested for wire-fault
detection
In case of an internal detected error, the sensor output signal has to be clamped by
the sensor to sensor supply voltage. This feature enables the software application
to recognize this failure.
Sensor must be supplied with AC sensor supply voltage and must not exceed the
max output current (overload) (see section 1.11.1).
Recommended pressure sensor:
Pressure Sensor MBS1250 (0-40/160/250/400/500/600 bar)
Technical Information 11058299
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 15
Analog Inputs
Analog Joysticks
The demands on an analog Joystick are the same like connecting a potentiometer or
an Electronic Pedal.
For further information about our analog Joystick JS1000 please refer to the Technical
Information 11007854.
Hydromotor-Direction-Sensor
The motor direction is detected by using an analog input signal.
Sensor must be supplied by the sensor supply voltage of the H1-AC
Upper and lower voltage limits for the output signals below sensor supply are
requested for wire-fault detection
The voltage range of the output signals have to be in the allowed input range of
the analog inputs
PPU needs to be compliant to the input resistance of the rpm and analog input
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 16
Frequency Inputs
Hydromotor Speed Sensor
Sensor must be supplied by the sensor supply voltage of the H1-AC
Upper and lower voltage limits for the output signals below sensor supply are
requested for wire-fault detection
The voltage range of the output signals have to be in the allowed input range of
the analog inputs
PPU needs to be compliant to the input resistance of the rpm and analog input
AC Control Connector The listed resistors and diodes are recommandations
Sensor (+5V) CC1p03
15k R1
Motor RPM Input CC1p05 R1 = 1k
R2 R2 = 100R
Motor Speed sensor
R3 = 100k
13k5 R3 Open collector NPN Signal Level 0,5V / 4,6V
Sensor (-) CC1p04
No SIL2 certification
Sensor (+5V) CC1p03
15k R4
Motor Speed sensor R4 = 100k
5V Sensor Supply R5 = 100R
Open collector PNP
R6 = 1k5
R5
Motor RPM Input CC1p05 Signal Level 0,5V / 4,6V
13k5 R6
Sensor (-) CC1p04
R7 = 820R (9V)
No SIL2 certification
1k2 (12V)
Battery supply CC1p01
3k3 (24V)
Motor Speed sensor
Sensor (+5V) 9 to 36V Battery Supply 4k7 (32V)
15k Open collector PNP R8 = 1k8
R7 ZD = 4V7 / 0,25W
Motor RPM Input CC1p05
13k5
ZD 4V7
R8
Signal Level 0,5V / 4,6V
0,25W
Sensor (-) CC1p04
Sensor (+5V) CC1p03
15k R
R9 Sauer-Danfoss
Motor RPM Input CC1p05
Motor Speed sensor
13k5 R Supplied with 5V
Sensor (-) CC1p04
No SIL2 certification
Battery supply CC1p01
Sensor (+5V)
KPPG x6xxx Signal Level
15k
R9 = 1k0 (12V) 0,5V / 4,5V
R9 Sauer-Danfoss
Motor RPM Input CC1p05 1k0 (24V) 0,5V / 4,7V
Motor Speed sensor
ZD 4V7 Supplied with 12 to 32V 1k5 (32V) 0,6V / 4,6V
13k5 0,25W ZD = 4V7 / 0,25W
Sensor (-) CC1p04
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 17
Frequency Inputs
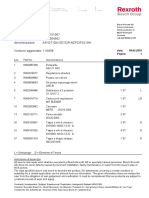
Honeywell GTN 1Axxx Hydromotor Speed Sensor
The Honeywell Sensor GTN 1A131 (9-16V supply) and 1A211 (21-32V supply) are often
used in the ICVD gear box. The digital output provides an open collector, switching to
ground.
For further technical details, please visit the Honeywell homepage.
AC Control Connector The listed resistors is a recommandation!
Battery supply CC1p01
3
Sensor (+5V) CC1p03
15k 3K3 Supply Signal Level
2 Rv
Motor RPM Input CC1p05
Honeywell
GTN 1A131 8-16V 1,3V / 3,7V
13k5 GTN 1Axxx GTN 1A211 21-32V 1,6V / 3,7V
1
Sensor (-) CC1p04
Recommended configuration for the Motor RPM
Additional PPU Functions = 107 [RPM Diagnostics]
RPM Diagnostics (signal levels)
Name % V
Short Power 80 4,0
No Error High 66 3,3
Ground Lead 50 2,5
Open
Signal Lead Open 45 2,25
Power Lead Open 40 2,0
No Error Low 20 1,0
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 18
Frequency Inputs
Speed, Direction and Temperature Sensor
The Speed, Direction and Temperature-Sensor is specially designed for the H1Product
Family and is used in the H1 Pumps and Motors.
The Sensor provides the following Output Signals:
Two Speed Signals (only one Signal used for AC Control)
One Analog direction Signal
One Analog Temperature Signal (not used at the AC Control)
The electrical design was tailored for the AC Control, so there are no adjustments
required.
For using with H1B Motors a DEUTSCH Connector DTM06-6S is required.
For further information of the Speed, Direction and Temperature Sensor please refer
to the Technical Information 11046759.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 19
Electrical Characteristics
Pin Configuration
Connector / Name Note
Pin
CC1:01 Battery (-) Power supply input for battery (-)
CC1:02 Battery (+) Power supply input for battery (+)
Estimated maximum current is 12A
CC1:03 Motor-PPU-Supply (+) Sensor-Supply (+) for the HST-Motor-PPU-Sensor
Supply for sensors within 4.825 to 5.075 V
CC1:04 Motor-PPU-Supply (-) Sensor-Supply (-) for the HST-Motor-PPU-Sensor
CC1:05 Motor-PPU-RPM-Input Frequency-Input for HST-Motor-PPU-Sensor
CC1:06 Forward-Direction-Input Digital Input for driving direction FORWARD
Switched to battery supply (12/ 24 V)
CC1:07 Reverse-Direction-Input Digital Input for driving direction REVERSE
Switched to battery supply (12/ 24 V)
CC1:08 Creep/Drive-Analog- Sensor-Supply (+) for Creeping- or Driving-Pot
Supply (+) Supply for sensors within 4.825 to 5.075 V
CC1:09 Creep/Drive-Analog- Sensor-Supply (-) for Creeping- or Driving-Pot
Supply (-) Direct GROUND-Connection
CC1:10 Creep/Drive-Analog-Input Analog-Input for nominal Creeping- or Driving-Pot
CC1:11 Red-Creep/Drive-Analog- Analog-Input for redundant Creeping- or Driving-Pot
Input
CC1:12 Neutral-Direction-Input Digital Input for driving direction NEUTRAL
Switched to battery supply (12/24 V)
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 20
Electrical Characteristics
Pin Configuration
Connector / Pin Name Note
CC2:01 Red-Inch-Analog-Input Analog-Input for redundant Inching-Pot
CC2:02 Mode Selection Input B Digital-Input for driving mode selection
CC2:03 Motor PROP/PCOR Valve- Proportional-Output (+) for the Pressure-Control-
Output Override or Prop-Motor Valve
CC2:04 Motor-PPU-Direction-Input Analog-Input for HST-Motor-Direction
CC2:05 Inch-Analog-Supply (+) Sensor-Supply (+) for Inching-Pot
Supply for sensors within 4.825 to 5.075 V
CC2:06 Inch-Analog-Supply (-) Sensor-Supply (-) for Inching-Pot
Direct GROUND-Connection
CC2:07 Inch-Analog-Input Analog-Input for nominal Inching-Pot
CC2:08 Motor BPD Valve-Output Digital-Output for the Brake-Pressure-Defeat
(BPD) Valve
Switched to battery (+)-supply
CC2:09 Digital Output B2 (-) Digital-Output for Brake Light
Switched to battery (-)-supply
CC2:10 Digital Output B1 (+) Digital-Output for the FNR Forward LED, Fault LED
Switched to battery (+)-supply
CC2:11 Mode-Selection-Input A Digital-Input for driving mode selection
CC2:12 Mode Selection Input B Digital-Input for driving mode selection
(Redundant) (Redundant)
CC3:01 Digital Output A1 (+) Digital-Output for Brake-Light, Fault- and Reverse-
LED
Switched to battery (+)-supply
CC3:02 Digital Output A2 (-) Digital-Output for Vehicle-Speed-Dependent
Output-Signal
Switched to battery (-)-supply
CAN:01 Communication-Connection
for CAN-High-Line
CAN:02 Communication-Connection
for CAN-Low-Line
CAN:03 Communication-Connection
for CAN-Ground
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 21
Electrical Characteristics
Pin Configuration
Connector / Name Note
Pin
PPU:01 Pump-PPU-Supply (+) Sensor-Supply (+) for HST-Pump-PPU-Sensor
Supply for sensors within 4.825 to 5.075 V
PPU:02 Pump-PPU-RPM-Input Frequency-Input for HST-Pump-PPU-Sensor
PPU:03 Pump-PPU-Supply (-) Sensor-Supply (-) for the HST-Pump-PPU-Sensor
PSC:01 Forward-Valve (+) Proportional-Output (+) for the FORWARD-Valve.
PSC:02 Reverse-Valve (+) Proportional-Output (+) for the REVERSE Valve
PSC:03 Digital Output A1 (+) Connected via wiring Harness to CC3:01
PSC:04 Digital Output A2 (-) Connected via wiring Harness to CC3:02
PSC:05 Reverse-Valve (-) Feedback for the REVERSE-Valve
PSC:06 Forward-Valve (-) Feedback for the FORWARD-Valve
PPC:01 Sensor-A-Supply (+) Sensor-Supply (+) for Pump-Pressure-Sensor A
Supply for sensors within 4.825 to 5.075 V
PPC:02 Sensor-A-Signals Analog-Input for Pump-Pressure-Sensor A
PPC:03 Sensor-A-Supply (-) Sensor-Supply (-) for Pump-Pressure-Sensor A
Direct GROUND-Connection
PPC:04 Sensor-B-Supply (-) Sensor-Supply (-) for Pump-Pressure-Sensor B
Direct GROUND-Connection
PPC:05 Sensor-B-Signals Analog-Input for Pump-Pressure-Sensor B
PPC:06 Sensor-B-Supply (+) Sensor-Supply (+) for Pump-Pressure-Sensor B
Supply for sensors within 4.825 to 5.075 V
Supply Characteristics
Parameter Min Max Units Note
Battery Supply-Current - 12 A
Recommended fuse size - 16 A
Permanent Supply-Voltage-Range 9 36 VDC
Rated-12V-Range 9 16 VDC
Rated-24V-Range 18 32 VDC
Permanent Reverse-Voltage-Protection - -36 VDC
Current per Connector-Pin - 3 A
Sensor-Supply-Voltage-Range (internal) 4.825 5.075 VDC
Sensor-Supply-Current - 1 A
It is strongly recommended to switch the power supply of the AC control together
with the power supply of the engine to avoid misleading errors.
This even includes the use of emergency stops, safety switches etc.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 22
Electrical Characteristics
I/O Characteristics
Digital Inputs
Parameter Min Max Units Note
Rising voltage threshold - 7.00 VDC A digital input is guaranteed to be read as
high if the voltage is grater than 7.00V.
Falling voltage threshold 1.66 - VDC A digital input is guaranteed to be read as
low if the voltage is less than 1.66V.
Input Impedance 13.4 13.8 k
Analog Inputs
Parameter Min Max Units Note
Input voltage range 0.08 5.26 VDC
Resolution - 12 Bit 4096 steps
Input Impedance 230 236 k
Frequency Input (Motor RPM)
Parameter Min Max Units Note
Rising voltage threshold (middle - 3,5 V The frequency input is guaranteed to
range) be read as high if the voltage is
grater than 3.5V.
Falling voltage threshold 0.74 - V The frequency input is guaranteed to
(middle range) be read as low if the voltage is less
than 0.74V
Input Impedance 7.00 7.21 kOhm 15kOhm to sensor supply / 13.5
kOhm to GND
Frequency Range 0 10000 Hz In steps of 1 Hz.
Analog Input (Motor Direction)
Parameter Min Max Units Note
Input voltage range 0.08 5.26 VDC
Resolution - 12 Bit 4096 steps
Input Impedance - - k 15kOhm to sensor supply / 14.1 kOhm to
GND
PWM Output for Motor Displacement Control
Parameter Min Max Units Note
Proportional Current 0 3.0 A
Output voltage - Supply Output voltage is supply voltage!
PWM frequency 33 200 Hz
Digital Outputs
Parameter Min Max Units Note
Output Current 0,005 3.0 A
Output voltage A1(+)/B1(+) Supply Output voltage is supply voltage!
Output Current A2(-)/B2(-) GND Output voltage is GND!
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 23
Operating Characteristics
Temperature Ratings
Parameter Min Max Units Note
Operating Temperature- -40 104 °C 115°C (240F) Intermittent = Short term
Range -40 220 F t < 1min per incident and not exceeding
2 % of duty cycle based load-life
Application Software 0 70 °C
download 32 158 F
Parameter download -40 104 °C
-40 220 F
Protection Characteristics
Parameter Min Max Units Note
Short Circuit All inputs and outputs shall withstand
continuous short circuit to all other leads.
When the short circuit is removed the unit
returns to normal function.
EMC-Immunity 100 V/m EN 61000-6-2
EMC generic standard for immunity, industrial
environment
- incl. 1kHz w/ AM 80%
EMC-Emission EN 61000-6-3
EMC generic standard for emission, residential
and industrial environments.
EN 12895 for industrial trucks.
ESD 15 kV EN 61 000-4-2
8 kV - Electrostatic discharge immunity test Level 4.
- Direct contact discharge to connector pins.
Automotive Transients ISO 7637 / 1-3
Temp / Volt / Humidity IEC 60068-2-38
IP67 & IP69K IEC 60529 & DIN 40050 part 9
Sinusoidal vibration
- IEC60068-2-6 Fc, 60 Level 2
Vibration Level Sine-
30 G (Resonance search not practicable)
Acceleration
Vibration test random
- IEC 60068-2-64, test Fh Level 3
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 24
General Wiring Guidelines
CAN bus wiring
The wiring of the vehicles CAN bus must be according SAE J1939-11 Physical layer
and ISO 11898-2. The following information are an abstract of the ISO11898-2, please
consider as well the official rules.
For the High-Speed (250 kbit/s) CAN bus both ends of the signal wires (CAN_H and
CAN_L) must be terminated with 120 Ω, because the communication flows both ways
on the CAN bus.
ECU ECU ECU
1 ls 2 n
ls
120 120
d d
L
The following points have to be considered:
Cable twisted pair, shielded
Cable impedance (Z) 120 Ω nominal
Length-related resistance 70 mΩ/m (copper wire 0,25mm² min)
Maximum 30 devices (ECU) on the bus
Maximum bus length (L) 40m
Maximum cable stub length (ls) 0,3m
Node distance (d) 0,1 – 40m
Termination resistor 120 Ω on both ends, not directly on a ECU
Bus traffic less than 40% recommended
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 25
General Wiring Guidelines
CAN Adapter Cable
To connect the AC Controller with the CG150 CAN Gateway a CAN adapter cable is
required.
DEUTSCH connector Female D-SUB connector
DTM06 3 pin 9 pin
CAN High 1 120 1 nc
CAN Low 2 2 CAN Low
CAN Shield 3 3 Ground
4 nc
5 Shield CAN Bus
6 nc
7 CAN High
8 nc
9 Power Supply (+)
F
1A
- Batt. +
12/24VDC
Bill of material:
CAN Deutsch Connector DTM06 3-SKT PLUG GY
Material No. 11033864
9 pin female D-SUB Connector with housing
120 ohm resistor 1/4W ± 5% or better
1 m Cable 3 wire, diameter 0,2 to 1,0 mm² (0,5 mm² recommended)
If using a cable longer than 1 m, a shielded cable is required. For further information
see the JR1939 specification.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 26
General Wiring Guidelines
Machine Wiring Guidelines
The following Guidelines are recommendations, please consider official rules like SAE,
ISO etc.
1. All wires must be protected from mechanical abuse. Wires can be rum in
flexible metal or plastic conduits.
2. Use 85°C (185F) wire with abrasion resistant insulation. 105°C (221F) wire
should be considered near hot surfaces
3. Use AWG 20 -24 wires (0,2 – 0,5 mm²) for solid crimp Type contacts (standard
in assembly bag) or AWG 16 – 20 (0,5 – 2,0 mm²) for Stamped & formed Type
contacts.
4. The outer diameter for Cables must be in the following range to comply the
environmental protection:
Connector Name Connector Type Outer Diameter
CC1 or CC2 DTM12 1,35 to 3,05 mm
0.053 to 0.120”
CAN DTM06 1,35 to 3,05 mm
0.053 to 0.120”
PSC Adapter DT04 2,23 to 3,68 mm
0.088 to 0.145”
5. Separate high current wires such as solenoids, lights, alternators or fuel
pumps from control wires.
6. Run wires along the inside of, or close to, metal machine frame surfaces
where possible. This simulates a shield which will minimize the effects of
EMI/RFI radiation.
7. Do not run wires near sharp metal corners. Consider running the wire
through a grommet when rounding a corner.
8. Do not run wires near hot machine members.
9. Provide strain relief for all wires.
10. Avoid running wires near moving or vibrating components.
11. Avoid long, unsupported wire spans.
12. All sensors and valve drive circuits have dedicated wired power sources and
ground returns. They should be used.
13. Sensor lines should be twisted about one turns every 10 cm (4 inches).
14. It is better to use wire harness anchors that will allow wires to float with
respect to the machine frame rather than rigid anchors.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 27
Safety Precautions
Safety Precautions
Always consider safety precautions before beginning a service procedure. Protect
yourself and others from injury. Take the following general precautions whenever
servicing a hydraulic system.
Unintended machine movement
! Warning
Unintended movement of the machine or mechanism may cause injury to the
technician or bystanders. To protect against unintended movement, secure the
machine or disable/disconnect the mechanism while servicing.
Flammable cleaning solvents
! Warning
Some cleaning solvents are flammable. To avoid possible fire, do not use cleaning
solvents in an area where a source of ignition may be present.
Fluid under pressure
! Warning
Escaping hydraulic fluid under pressure can have sufficient force to penetrate your
skin causing serious injury and/or infection. This fluid May also be hot enough to
cause burns. Use caution when dealing with hydraulic fluid under pressure. Relieve
pressure in the system before removing hoses, fittings, gauges or components. Never
use your hand or any other body part to check for leaks in a pressurized line. Seek
medical attention immediately if you are cut by hydraulic fluid.
Personal safety
! Warning
Protect yourself from injury. User proper safety equipment, including safety glasses, at
all times.
Welding on a machine
! Warning
The following procedures are recommended when welding on a machine:
- The engine should be off
- Disconnect the negative battery cable from the battery
- Do not use electrical components to ground the welder. Clamp the ground cable for
the welder to the component that will be welded as close a possible to the weld.
During on machine tests make sure, that all persons are in safe positions. Be sure, that
unexpected movement of the machine will not injure persons or damage property.
Best practice is, to lift the driven wheels or tracks off the ground during start-up and
test runs.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 28
Revision History
Date Page Changed Rev
28 Oct, 2009 - Initial Revision A
29 Jan 2010 12 Sample circuts for Mode switch A and B B
11 June 2010 17, Connector Speed sensor changed, C
21 Digital Output specification changed
08 Nov 2010 3, 11, Reference list updated, new specification for digital D
15 inputs, new pressure sensor defined
09 Dec 2010 24 CAN bus wiring guideline added E
28 June 2011 24 New page 18, Honeywell sensor GTN 1Axxx added F
24 Nov 2011 22, Recommendation Power supply, CAN Adapter G
26 circut
2010 Sauer-Danfoss. All rights reserved.
Sauer-Danfoss accepts no responsibility for possible errors in catalogs, brochures and other printed
material. Sauer-Danfoss reserves the right to alter its products without prior notice. This also applies to
products already ordered provides that such alterations aren’t in conflict with agreed specifications. All
trademarks in this material are properties of the respective owners. Sauer-Danfoss, the Sauer-Danfoss
logotype, PLUS+1 and PLUS+1 logo are trademarks of the Sauer-Danfoss Group.
Revision G H1 AC Application Guideline - Electrical Installation_Rev G.doc 29
You might also like
- Fuse Box Fiat Punto 1Document12 pagesFuse Box Fiat Punto 1Ruben RochaNo ratings yet
- J1939-73 - Application Layer DiagnosticsDocument4 pagesJ1939-73 - Application Layer DiagnosticsJuan Sebastián MalagónNo ratings yet
- CAN ID To J1939 - N2K PGN ConverterDocument260 pagesCAN ID To J1939 - N2K PGN Converterdhanssmart100% (1)
- Additive Injection System: Equalis AIMDocument2 pagesAdditive Injection System: Equalis AIMJose HuescaNo ratings yet
- V200 User ManualDocument171 pagesV200 User ManualuriahskyNo ratings yet
- Naze32 Rev6 Manual v1.2Document30 pagesNaze32 Rev6 Manual v1.2Zeiler Ribes SantiagoNo ratings yet
- Paikane Wiring With Dse-4520Document21 pagesPaikane Wiring With Dse-4520Aung HtutNo ratings yet
- Stepper Motors For Dashboards PDFDocument1 pageStepper Motors For Dashboards PDFIsos CellNo ratings yet
- APC122 - Technical Leaflet - V23 - CustomerDocument35 pagesAPC122 - Technical Leaflet - V23 - Customerjasmin selimićNo ratings yet
- Tổng mạch điện ECU PRO-NEW-3 PDFDocument260 pagesTổng mạch điện ECU PRO-NEW-3 PDFNhật ĐặngNo ratings yet
- WK 09my Heavy (Trae Eg98a)Document181 pagesWK 09my Heavy (Trae Eg98a)haviettuanNo ratings yet
- Crank Wheel Pulser SoftwareDocument3 pagesCrank Wheel Pulser SoftwareDarel DalmassoNo ratings yet
- Iqan MD3 DatasheetDocument4 pagesIqan MD3 DatasheetPiero Fabrizzio Mendoza FuenteNo ratings yet
- RCI 510 System SkyAzul Engl.. 3 PDFDocument2 pagesRCI 510 System SkyAzul Engl.. 3 PDFTom WilberNo ratings yet
- Bucher Hydraulic UML-21LV Set PDFDocument6 pagesBucher Hydraulic UML-21LV Set PDFGustavo Castillo100% (1)
- Manual SerDia2010 EN PDFDocument217 pagesManual SerDia2010 EN PDFAttila EngiNo ratings yet
- Service Manual Supplement: Lift ConnectDocument24 pagesService Manual Supplement: Lift ConnectTECBOOM EQUIPAMENTOSNo ratings yet
- Canbus 160902031824Document103 pagesCanbus 160902031824Petros KarabilasNo ratings yet
- Elau SX-1 Servo DriveDocument170 pagesElau SX-1 Servo Driveanon_6032832230% (1)
- ID FLX Lite 1.9r1 Reference GuideDocument149 pagesID FLX Lite 1.9r1 Reference GuideforoNo ratings yet
- Simovert Master Drives Servo Control (SC) Typesatod Ac-Ac: Operating InstructionsDocument174 pagesSimovert Master Drives Servo Control (SC) Typesatod Ac-Ac: Operating Instructionsjulyo carlosNo ratings yet
- Electrical System: Main Menu Click The Volvo-Logo in The Lower Right Corner To Return To This MenuDocument51 pagesElectrical System: Main Menu Click The Volvo-Logo in The Lower Right Corner To Return To This Menuiqbal khairul hakimNo ratings yet
- LHBH1Document1,337 pagesLHBH1tadthies100% (1)
- RepairManual DIWA.5Document172 pagesRepairManual DIWA.5Muhammet KınalıNo ratings yet
- DS 160 Service ManualDocument61 pagesDS 160 Service ManualRuben De La RosaNo ratings yet
- Be142 Genset Controller ManualDocument28 pagesBe142 Genset Controller ManualSousaFVNo ratings yet
- DS-2002-005 - Microcontrollers ME - DS - REVDocument2 pagesDS-2002-005 - Microcontrollers ME - DS - REVWhite TigerNo ratings yet
- 1 150, 50, 280 & Lever Lock 280 & Lever LockDocument46 pages1 150, 50, 280 & Lever Lock 280 & Lever LocksanachNo ratings yet
- ZX400R ZX400LCH Hydrauliccircuit Diagram: Attach To Part No.: TT1JK-E-00Document9 pagesZX400R ZX400LCH Hydrauliccircuit Diagram: Attach To Part No.: TT1JK-E-00Anonymous PBe2tL4i100% (1)
- Electronic Control Module - Product Link: EspecificaçõesDocument3 pagesElectronic Control Module - Product Link: EspecificaçõesMauro Miranda CoutoNo ratings yet
- Delphi Dcm3.3 Jtag JCBDocument9 pagesDelphi Dcm3.3 Jtag JCBMustafa IbrahimNo ratings yet
- Di650i Brochure EnglishDocument12 pagesDi650i Brochure Englishismael machacaNo ratings yet
- Copex Brochure REFLEX FR-GB 2016Document2 pagesCopex Brochure REFLEX FR-GB 2016Nicolas BourbeyNo ratings yet
- ED PlcWin 1eng Manuale 1 - 06Document8 pagesED PlcWin 1eng Manuale 1 - 06AbdullahNo ratings yet
- Installation Manual: Glendinning Electronic Engine ControlsDocument56 pagesInstallation Manual: Glendinning Electronic Engine ControlsFedilino P. Fornolles100% (1)
- Timing Board Schematic For Select Kai Kaf Kli Evaluation KitsDocument12 pagesTiming Board Schematic For Select Kai Kaf Kli Evaluation KitsFer NandoNo ratings yet
- Manejo Básico de Sculi y LidiaDocument4 pagesManejo Básico de Sculi y LidiaArtemio Garcia BarrientosNo ratings yet
- Gottwald ProductsDocument4 pagesGottwald ProductsPedroNo ratings yet
- Brochure - Cat C6-6 ACERT Marine GensetsDocument6 pagesBrochure - Cat C6-6 ACERT Marine GensetsmouradNo ratings yet
- ElecDocument100 pagesElecSaud Dhopawnkar100% (1)
- Rdso SPN 144Document34 pagesRdso SPN 144aniltejas61100% (1)
- 5 Diagnostic Management: Software Documentation Page 5-1 EDC7 Keyword Protocol 2000Document10 pages5 Diagnostic Management: Software Documentation Page 5-1 EDC7 Keyword Protocol 2000Lucía jandig100% (1)
- DCM Light Duty Diesel Engine Controller Series PDFDocument2 pagesDCM Light Duty Diesel Engine Controller Series PDFAsif ShahNo ratings yet
- Hoppecke TrakPowerPremium Ficha (Cargador) (Ingles) PDFDocument8 pagesHoppecke TrakPowerPremium Ficha (Cargador) (Ingles) PDFJuan Carlos Rubio FrescoNo ratings yet
- Fassi Crane Use and Maintenance Manual Translation of The Original Instructions UM002Document195 pagesFassi Crane Use and Maintenance Manual Translation of The Original Instructions UM002MANUEL CASTILLONo ratings yet
- Hướng Dẫn Lắp Đặt Máy Treo Tường Cục Bộ FujitsuDocument18 pagesHướng Dẫn Lắp Đặt Máy Treo Tường Cục Bộ FujitsuDoan Tien Do100% (1)
- DTCList EMRL1 SecondaryECU ENDocument5 pagesDTCList EMRL1 SecondaryECU ENKalin GalabovNo ratings yet
- 7391000UKDocument233 pages7391000UKcaferNo ratings yet
- IHM Mac50 Mitsubishi ManualDocument164 pagesIHM Mac50 Mitsubishi ManualandersonovalheNo ratings yet
- Hirschmann Davs 311 Sensor Pressure 10-30v-Dc Transducer b489657Document1 pageHirschmann Davs 311 Sensor Pressure 10-30v-Dc Transducer b489657ejazNo ratings yet
- XPROG Programmer: Users ManualDocument19 pagesXPROG Programmer: Users Manualacb . bNo ratings yet
- Minas A5Document85 pagesMinas A5Daniel Almendarez PazNo ratings yet
- 03 Profibus DPDocument104 pages03 Profibus DPMarcelle GumeratoNo ratings yet
- Dana Rexroth HVT R2 Hydromechanical Variable TransmissionDocument2 pagesDana Rexroth HVT R2 Hydromechanical Variable TransmissionPankaj GargNo ratings yet
- 3126e Comercial y 3126B PDFDocument20 pages3126e Comercial y 3126B PDFdiony1820% (1)
- SBF-086244 000 enDocument10 pagesSBF-086244 000 enNur Muhammad HusenNo ratings yet
- Briggs and Stratton 294442Document29 pagesBriggs and Stratton 294442FRNo ratings yet
- Z-PVW en PDFDocument43 pagesZ-PVW en PDFNghĩa Man ĐứcNo ratings yet
- Thomson Electrac HD Linear Actuator Motion Control per CAN BusFrom EverandThomson Electrac HD Linear Actuator Motion Control per CAN BusNo ratings yet
- L2917Document7 pagesL2917Sofyan AndikaNo ratings yet
- H1P089 Technical InfoDocument40 pagesH1P089 Technical InfoWissem El'MissaouiNo ratings yet
- Inductive Angle SensorDocument8 pagesInductive Angle SensorWissem El'MissaouiNo ratings yet
- Draft SensorDocument8 pagesDraft SensorWissem El'MissaouiNo ratings yet
- 02 - Matrix EVO Calibration - ENGDocument7 pages02 - Matrix EVO Calibration - ENGWissem El'MissaouiNo ratings yet
- Lista Parti Di RicambioDocument45 pagesLista Parti Di RicambioWissem El'MissaouiNo ratings yet
- Axial Piston Variable Displacement Pump A4VG: RE 92 003/11.03 1/52 Replaces: 06.03Document52 pagesAxial Piston Variable Displacement Pump A4VG: RE 92 003/11.03 1/52 Replaces: 06.03Wissem El'MissaouiNo ratings yet
- Ieec2018 - I - General - Easy - New Eci ManagementDocument32 pagesIeec2018 - I - General - Easy - New Eci ManagementWissem El'MissaouiNo ratings yet
- Te32 Transmission-Vf PDFDocument2 pagesTe32 Transmission-Vf PDFWissem El'Missaoui100% (1)
- Roulement Timken PDFDocument828 pagesRoulement Timken PDFWissem El'MissaouiNo ratings yet
- 21st Century Literature WEEK 5 ACTIVITY SHEETDocument5 pages21st Century Literature WEEK 5 ACTIVITY SHEETelsa0% (1)
- Ghilmis User Setup Form - 10032020Document1 pageGhilmis User Setup Form - 10032020IgnatiusNo ratings yet
- Introduction To Audio Visual MediaDocument26 pagesIntroduction To Audio Visual MediaAnup SemwalNo ratings yet
- 4 Channel DVR: User's ManualDocument68 pages4 Channel DVR: User's ManualjlfepeNo ratings yet
- 4.2 Suffixes For Literals: Visual BasicDocument22 pages4.2 Suffixes For Literals: Visual BasicKarar Haidar AltalibiNo ratings yet
- P 0456 Automatic Solar Rad TrackerDocument95 pagesP 0456 Automatic Solar Rad TrackerSam Mathew100% (1)
- Top Five Ways To Find A SAP Table and Field Within A TransactionDocument14 pagesTop Five Ways To Find A SAP Table and Field Within A Transactionedmondo77No ratings yet
- LAB AssignmentDocument4 pagesLAB AssignmentAlwani IzzatiNo ratings yet
- Omegas Prezentacija 01Document20 pagesOmegas Prezentacija 01Predrag Djordjevic100% (1)
- TL-WN721N - TL-WN722N User Guide PDFDocument43 pagesTL-WN721N - TL-WN722N User Guide PDFsulavojhaNo ratings yet
- RBS 6601Document15 pagesRBS 6601RiverNo ratings yet
- PC Guides - PC Component Compatibility Quick ReferenceDocument5 pagesPC Guides - PC Component Compatibility Quick ReferenceTrismegistusNo ratings yet
- Final ORK 2016-2018 Goal Meth 11-30-15 With AppendixDocument37 pagesFinal ORK 2016-2018 Goal Meth 11-30-15 With AppendixJAGUAR GAMINGNo ratings yet
- History of Digital SignatureDocument1 pageHistory of Digital SignatureAshutosh Singh ParmarNo ratings yet
- Engine Electrical System: 7. RHD 3.0 L ModelDocument16 pagesEngine Electrical System: 7. RHD 3.0 L ModelСергей ЕсиповNo ratings yet
- Lyft SHDocument30 pagesLyft SHhungphung107No ratings yet
- Thesis On Adaptive FilterDocument10 pagesThesis On Adaptive Filtershannongutierrezcorpuschristi100% (2)
- An Open-Ended Laboratory System With Computer-Aided Simulation For Undergraduate Electronic EngineeringDocument5 pagesAn Open-Ended Laboratory System With Computer-Aided Simulation For Undergraduate Electronic Engineeringpmahesh268No ratings yet
- Library Management System Project Code in Visual BasicDocument51 pagesLibrary Management System Project Code in Visual Basicraman111383% (12)
- Estimate of ElectrificationDocument54 pagesEstimate of ElectrificationNikhilNo ratings yet
- Patni ContactsDocument40 pagesPatni ContactsMava SalesNo ratings yet
- Xsel J - K (Me0116 23a) PDFDocument424 pagesXsel J - K (Me0116 23a) PDFKenNo ratings yet
- Logistics E CommerceDocument16 pagesLogistics E CommercePrateek VyasNo ratings yet
- Lucrarea de Laborator Nr. 2: Raport LaDocument5 pagesLucrarea de Laborator Nr. 2: Raport LaAnastasia GhermanNo ratings yet
- Activity Guide - Functions Make - Unit 4 Lesson 11Document3 pagesActivity Guide - Functions Make - Unit 4 Lesson 11Devin PhillipsNo ratings yet
- Full Option Code PDFDocument64 pagesFull Option Code PDFJsmk KabedeNo ratings yet
- I CubeDocument27 pagesI CubeapkinehaNo ratings yet
- Configure VTP Server and Client in SwitchDocument4 pagesConfigure VTP Server and Client in SwitchPerbz JayNo ratings yet
- Daden Newsletter 1407Document2 pagesDaden Newsletter 1407David BurdenNo ratings yet
- Syed Zeeshan Ali: Professional SummaryDocument5 pagesSyed Zeeshan Ali: Professional SummaryOwais AhmedNo ratings yet