Download as pdf or txt
You might also like
- CFMOTO 800MT Service ManualDocument255 pagesCFMOTO 800MT Service Manualgustavofm1936100% (1)
- Manual Sennebogen 821Document172 pagesManual Sennebogen 821Angelo Musina83% (6)
- 2012 Audi q7 17Document16 pages2012 Audi q7 17Wowebook ProNo ratings yet
- BMW Motorrad: Repair GuideDocument928 pagesBMW Motorrad: Repair GuidefisgonatorNo ratings yet
- CCTVDDocument20 pagesCCTVDSteven SunNo ratings yet
- SM-800.40 FlexAirValve PDFDocument31 pagesSM-800.40 FlexAirValve PDFJIM CAMPBELLNo ratings yet
- Vehicle System Dynamics: Please Scroll Down For ArticleDocument16 pagesVehicle System Dynamics: Please Scroll Down For ArticleBinhMinh NguyenNo ratings yet
- Tribology in Industry: H.P. Khairnar, V.M. Phalle, S.S. ManthaDocument13 pagesTribology in Industry: H.P. Khairnar, V.M. Phalle, S.S. ManthaBrunoNo ratings yet
- Pneumatic TrailDocument17 pagesPneumatic Trailranek.vandenpoelNo ratings yet
- Apollo Prediction of Tread Geometry Influence On Ply Steer Residual Aligning Torque (PRAT)Document9 pagesApollo Prediction of Tread Geometry Influence On Ply Steer Residual Aligning Torque (PRAT)Patrick DavisNo ratings yet
- Research Article: Driveline Torsional Analysis and Clutch Damper Optimization For Reducing Gear RattleDocument25 pagesResearch Article: Driveline Torsional Analysis and Clutch Damper Optimization For Reducing Gear RattleLindsay Shantha RubiaNo ratings yet
- Peng 1996Document21 pagesPeng 1996Ali ShamsodiniNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument24 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityLe Huy HoangNo ratings yet
- A Unified Semi-Empirical Tire Model With HigherAccuracy and Less ParametersDocument10 pagesA Unified Semi-Empirical Tire Model With HigherAccuracy and Less Parameterssmmj2010No ratings yet
- Design, Development and Manufacturing of Braking System For ATVDocument5 pagesDesign, Development and Manufacturing of Braking System For ATVRodrigo bolaNo ratings yet
- SAE Tyre SlipDocument10 pagesSAE Tyre SlipsammyNo ratings yet
- Analysis of The Kinematics and Compliance of A PasDocument10 pagesAnalysis of The Kinematics and Compliance of A Paspad abtNo ratings yet
- Simulation and Test Correlation of Wheel Radial Fatigue TestDocument8 pagesSimulation and Test Correlation of Wheel Radial Fatigue TestNguyễn Văn ThườngNo ratings yet
- Adaptive Vehicle Traction Force Control For Intelligent Vehicle Highway Systems IVHSsDocument11 pagesAdaptive Vehicle Traction Force Control For Intelligent Vehicle Highway Systems IVHSsjitenderkumar_goyal28No ratings yet
- Brake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle ResponseDocument15 pagesBrake Roughness - Disc Brake Torque Variation, Rotor Distortion and Vehicle Responsedebisi14140100% (1)
- A Dynamic Model For Tire-Road Friction Estimation Under Combined Longitudinal Lateral Slip SituationDocument6 pagesA Dynamic Model For Tire-Road Friction Estimation Under Combined Longitudinal Lateral Slip SituationPascal BrejaudNo ratings yet
- An Optimization Aproach For Design Parameters in Involute Spur Gears Considering TEDocument9 pagesAn Optimization Aproach For Design Parameters in Involute Spur Gears Considering TEG ChandrasekaranNo ratings yet
- Detection of Unbalance in Rotating Machines Using PDFDocument14 pagesDetection of Unbalance in Rotating Machines Using PDFKonstantinos KamarasNo ratings yet
- Steering FeelDocument6 pagesSteering FeelsammyNo ratings yet
- Simulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactDocument15 pagesSimulation and Experiments On An Isolated Racecar Wheel Rotating in Ground ContactVyssionNo ratings yet
- Tyre Effects On Handling Response, (Pulse Steering) 44612222Document11 pagesTyre Effects On Handling Response, (Pulse Steering) 44612222Basil AzeemNo ratings yet
- Tire-Stiffness and Vehicle-State Estimation Based On Noise-Adaptive Particle FilteringDocument17 pagesTire-Stiffness and Vehicle-State Estimation Based On Noise-Adaptive Particle FilteringsuyashNo ratings yet
- Analysis of A Gear Train Using Finite Element Modelling: Tawanda MushiriDocument10 pagesAnalysis of A Gear Train Using Finite Element Modelling: Tawanda MushirilitonNo ratings yet
- Seokyong Chae PHD Thesis ID 993173980Document206 pagesSeokyong Chae PHD Thesis ID 993173980nguyenrobotNo ratings yet
- Wheel Rail Wear Progression of High SpeedDocument13 pagesWheel Rail Wear Progression of High SpeedtiagorstNo ratings yet
- VehicleDriveabilityDynamicAnalysisofPowertrainSystemComponents Wrev Formatted Final RGDocument9 pagesVehicleDriveabilityDynamicAnalysisofPowertrainSystemComponents Wrev Formatted Final RGTiếngHátĐêmNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument5 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityAlberto CarbajalNo ratings yet
- Arquivo Único.pDocument51 pagesArquivo Único.pDG BinhoNo ratings yet
- A Comparison of Various Algorithms To Extract Magic Formula Tyre Model Coefficients For Vehicle Dynamics SimulationsDocument26 pagesA Comparison of Various Algorithms To Extract Magic Formula Tyre Model Coefficients For Vehicle Dynamics SimulationssuyashNo ratings yet
- Sae Technical Paper Series: James R. Funk, Joseph M. Cormier and Charles E. BainDocument14 pagesSae Technical Paper Series: James R. Funk, Joseph M. Cormier and Charles E. BainNicNo ratings yet
- 12999-Article Text PDF-56069-1-10-20190521Document11 pages12999-Article Text PDF-56069-1-10-20190521Alexander SenaNo ratings yet
- A Tool For Lap Time Simulation PDFDocument5 pagesA Tool For Lap Time Simulation PDFRodrigo BobNo ratings yet
- On The Braking Behavior of MotorcyclesDocument8 pagesOn The Braking Behavior of MotorcyclesSETHUBALAN B 15BAU033No ratings yet
- A Review On Design and Efficiency Improvement of WDocument19 pagesA Review On Design and Efficiency Improvement of WMeda RajeshNo ratings yet
- Machines 10 00805Document18 pagesMachines 10 00805Sam StideNo ratings yet
- Technical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004Document15 pagesTechnical Paper For Students and Young Engineers: - Fisita World Automotive Congress, Barcelona 2004rike.spNo ratings yet
- Calculation of Journal Bearing Dynamic Characteristics Including Journal Misalignment and Bearing Structural Deformation©Document10 pagesCalculation of Journal Bearing Dynamic Characteristics Including Journal Misalignment and Bearing Structural Deformation©kballeram9No ratings yet
- Validation of A FEA Tire Model For Vehicle Dynamic Analysis and Full Vehicle Real Time Proving Ground SimulationsDocument8 pagesValidation of A FEA Tire Model For Vehicle Dynamic Analysis and Full Vehicle Real Time Proving Ground SimulationsnaderNo ratings yet
- Xu 2016Document8 pagesXu 2016Ali ShamsodiniNo ratings yet
- Transportation Research Part C: Hossein Mirzaeinejad, Mehdi MirzaeiDocument15 pagesTransportation Research Part C: Hossein Mirzaeinejad, Mehdi Mirzaeiswapnil jadhavNo ratings yet
- Zhou 2018Document9 pagesZhou 2018R Prabhu SekarNo ratings yet
- Finite Element ModellingDocument15 pagesFinite Element ModellingsiritapeNo ratings yet
- Tire and ModelisationDocument66 pagesTire and ModelisationChaker AmirNo ratings yet
- Reliability-Based Assessment of Vehicle Safety in Adverse Driving Conditions-1Document14 pagesReliability-Based Assessment of Vehicle Safety in Adverse Driving Conditions-1Bridge&StructureNo ratings yet
- Analytical Modelling and Numerical Experiment Forsimultaneous Identification of Unbalance and Rolling-Bearingcoefficients of The Continuous Single-DiDocument25 pagesAnalytical Modelling and Numerical Experiment Forsimultaneous Identification of Unbalance and Rolling-Bearingcoefficients of The Continuous Single-DiAgustín Erasmo Juárez MartínezNo ratings yet
- Vehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityDocument30 pagesVehicle System Dynamics: International Journal of Vehicle Mechanics and MobilityLakshmipathy PNo ratings yet
- Modal Based Balancing of Rtors Using Differential Evolution AlgorithmDocument7 pagesModal Based Balancing of Rtors Using Differential Evolution AlgorithmJuan Angel Martinez RamirezNo ratings yet
- Tyre Report SampleDocument5 pagesTyre Report SampleArka PatraNo ratings yet
- The Effects of Simplifications On Isolated Wheel AerodynamicsDocument12 pagesThe Effects of Simplifications On Isolated Wheel AerodynamicsDaniel JueNo ratings yet
- Impact of Camber Angle On The Tire Tread BehaviourDocument10 pagesImpact of Camber Angle On The Tire Tread BehaviourchriserldevNo ratings yet
- Reconciliation of RotordynamicDocument6 pagesReconciliation of RotordynamicjmhNo ratings yet
- A Neural Network Approach For Roughness-Dependent Update of Tyre FrictionDocument18 pagesA Neural Network Approach For Roughness-Dependent Update of Tyre FrictionPedro StellaNo ratings yet
- Analysis For Suspension Hardpoint of Formula SAE CDocument7 pagesAnalysis For Suspension Hardpoint of Formula SAE CJay SoniNo ratings yet
- Conradie Finite 2016Document20 pagesConradie Finite 2016naderNo ratings yet
- Sae Technical Paper Series: Aleksander HacDocument12 pagesSae Technical Paper Series: Aleksander HacsonirocksNo ratings yet
- ASURT Formula Student Brake Design: Mohamed Samy BarakatDocument13 pagesASURT Formula Student Brake Design: Mohamed Samy Barakatibrahimmir3No ratings yet
- Optimization of An Engine Mounting System With Consideration of Frequency-Dependent Stiffness and Loss FactorDocument14 pagesOptimization of An Engine Mounting System With Consideration of Frequency-Dependent Stiffness and Loss FactorhadiNo ratings yet
- Arat 2014Document15 pagesArat 2014N'GOLO MAMADOU KONENo ratings yet
- Van Der Merwe-MODELLING AND VALIDATION OF ABS AND TYRE INTERACTION-108 A5ed0Document9 pagesVan Der Merwe-MODELLING AND VALIDATION OF ABS AND TYRE INTERACTION-108 A5ed0bách hàNo ratings yet
- Vehicle Gearbox Noise and Vibration: Measurement, Signal Analysis, Signal Processing and Noise Reduction MeasuresFrom EverandVehicle Gearbox Noise and Vibration: Measurement, Signal Analysis, Signal Processing and Noise Reduction MeasuresNo ratings yet
- Commercial Invoice: Bylog (Pty) LTDDocument2 pagesCommercial Invoice: Bylog (Pty) LTDAlmiro Boavida NhancaleNo ratings yet
- Induction Motor (Single Phase) : Specifications of Continuous Operating MotorDocument2 pagesInduction Motor (Single Phase) : Specifications of Continuous Operating MotorMichaelNo ratings yet
- Basic Engine: Systems OperationDocument11 pagesBasic Engine: Systems OperationLyrics JuradoNo ratings yet
- Accumulator (Koomey)Document26 pagesAccumulator (Koomey)Martin ToledoNo ratings yet
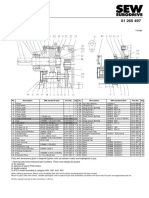
- SEW R47 Parts ListDocument1 pageSEW R47 Parts ListAndrés Tuesca Clase de inglesNo ratings yet
- Mtto MaxxusDocument62 pagesMtto MaxxusDanielValbuenaAriasNo ratings yet
- Carraro 143016Document11 pagesCarraro 143016Nizar BrahamNo ratings yet
- Acoples Lovejoy (Rejilla - Grid, 8 Pág.)Document8 pagesAcoples Lovejoy (Rejilla - Grid, 8 Pág.)marcelo castilloNo ratings yet
- Mark Iv Industrial Trimmaster: Parts List Effective 05-01-17Document1 pageMark Iv Industrial Trimmaster: Parts List Effective 05-01-17Samuel OdeiaddoNo ratings yet
- Remove - Install Intelligent Servo ModuleDocument3 pagesRemove - Install Intelligent Servo ModuleJosephNo ratings yet
- Medidas de Arruelas Do Assento Dos Injetores Common-RailDocument1 pageMedidas de Arruelas Do Assento Dos Injetores Common-RailDanilo SoaresNo ratings yet
- Antonio Carraro SRXDocument32 pagesAntonio Carraro SRXjack christoNo ratings yet
- The Roles and Applications of Additive Manufacturing in The Aerospace and Automobile SectorDocument6 pagesThe Roles and Applications of Additive Manufacturing in The Aerospace and Automobile SectorThilak gowdaNo ratings yet
- Ciruitos de Boom, Stick y Bucket - TextoDocument46 pagesCiruitos de Boom, Stick y Bucket - Textolalo11715100% (2)
- Mss sp-85Document12 pagesMss sp-85Mhand AmsNo ratings yet
- Audi A6 2000 System Wiring DiagramsDocument7 pagesAudi A6 2000 System Wiring Diagramsjosie100% (35)
- Fire Tank Folding InstructionsDocument2 pagesFire Tank Folding InstructionsForum PompieriiNo ratings yet
- 011 - RH340B - #340085 - Pressure Checking and Setting - 08 - 06-3720618enDocument28 pages011 - RH340B - #340085 - Pressure Checking and Setting - 08 - 06-3720618enhectorNo ratings yet
- H1 Pumps 45-53 Single - SM - 520L0958 - Rev AA - Jun 2007Document52 pagesH1 Pumps 45-53 Single - SM - 520L0958 - Rev AA - Jun 2007Jose Manuel Barroso PantojaNo ratings yet
- 1984 Honda Accord Fuse BoxDocument5 pages1984 Honda Accord Fuse BoxJoeNo ratings yet
- Equipo de Limpieza de Inyectores OTCDocument14 pagesEquipo de Limpieza de Inyectores OTCm30890398No ratings yet
- Microcontroller Managed Module For Automatic Ventilation of Vehicle InteriorDocument29 pagesMicrocontroller Managed Module For Automatic Ventilation of Vehicle InteriorVenkatesh KollisettiNo ratings yet
- Service Information: Wiring Diagram B9S, EM-EU5Document76 pagesService Information: Wiring Diagram B9S, EM-EU5Guillermo Guardia GuzmanNo ratings yet
- Equipment Inspection Checklist OstDocument43 pagesEquipment Inspection Checklist Ostakbar zulazmi100% (1)
- Aprilia Di Tech 50 - Pure Jet InjectionDocument38 pagesAprilia Di Tech 50 - Pure Jet InjectionSašo Brunšek-BrunoNo ratings yet