Download as pdf or txt
You might also like
- ENACb 1Document166 pagesENACb 1DarrylpnzNo ratings yet
- Filtronic-OrpheusRev 2 0Document3 pagesFiltronic-OrpheusRev 2 0Eduardo Aguilar0% (1)
- 04 15 2021 Basics of Automotive Ethernet Rev1.1Document71 pages04 15 2021 Basics of Automotive Ethernet Rev1.1RakshithNo ratings yet
- 2021 05 13 Teledyne LeCroy Auto ENET Compliance Webinar Rev. 1Document114 pages2021 05 13 Teledyne LeCroy Auto ENET Compliance Webinar Rev. 1Rakshith100% (1)
- How To Pick The Best Fronthaul Technology For Your C-RAN NetworkDocument11 pagesHow To Pick The Best Fronthaul Technology For Your C-RAN NetworkNassif HawaNo ratings yet
- BBS Book (PT 14) NeglyDocument7 pagesBBS Book (PT 14) Neglyapi-3871208No ratings yet
- Epson 3800 3880 SMDocument306 pagesEpson 3800 3880 SMIon IonutNo ratings yet
- Leg Support Calculation PDFDocument2 pagesLeg Support Calculation PDFSanjay MoreNo ratings yet
- 120lab Report 3Document4 pages120lab Report 3Valerie Mae Librero Areño100% (2)
- Mmrfi Flyer A4-AaDocument2 pagesMmrfi Flyer A4-AaDharmendra NayakNo ratings yet
- InnovativeTRModuleinstateoftheartGaNtechnology Extendedabstract PDFDocument5 pagesInnovativeTRModuleinstateoftheartGaNtechnology Extendedabstract PDFAshish JindalNo ratings yet
- NEWS 222 Englisch 200dpiDocument60 pagesNEWS 222 Englisch 200dpiNana AvianaNo ratings yet
- Coffe Can Radar MejoradoDocument13 pagesCoffe Can Radar MejoradoDaniel Alejandro Almela0% (1)
- 77 GHZ Long Range Radar Systems Status, Ongoing Developments and Future ChallengesDocument4 pages77 GHZ Long Range Radar Systems Status, Ongoing Developments and Future ChallengesAlexandru StefanNo ratings yet
- ADS Advanced Design SystemDocument82 pagesADS Advanced Design SystemphithucNo ratings yet
- Cyient Transmit and Receive Module For Radar SystemsDocument4 pagesCyient Transmit and Receive Module For Radar SystemsPercy100% (1)
- Webinar 60-GHz RDK Agilent-TSMC 03may2012 FinalDocument43 pagesWebinar 60-GHz RDK Agilent-TSMC 03may2012 FinalusrppriyankaNo ratings yet
- A 77-Ghz FMCW Radar System Using On-Chip Waveguide Feeders in 65-Nm CmosDocument11 pagesA 77-Ghz FMCW Radar System Using On-Chip Waveguide Feeders in 65-Nm CmosLanchiNo ratings yet
- Semiconductor Characterization - wk.1Document19 pagesSemiconductor Characterization - wk.1lntdan.st12No ratings yet
- RTESDocument2 pagesRTESbetong cotthepNo ratings yet
- Resonant Acoustic Nondestructive Testing: Ram-NdtDocument18 pagesResonant Acoustic Nondestructive Testing: Ram-Ndtsalfm08No ratings yet
- 130 NM CMOS Platform TechnologyDocument16 pages130 NM CMOS Platform TechnologyTahmidAzizAbirNo ratings yet
- CST Studio Suite: Electromagnetic Field Simulation SoftwareDocument8 pagesCST Studio Suite: Electromagnetic Field Simulation SoftwareSOLIDWORKS Indonesia - PT Arisma Data SetiaNo ratings yet
- Microwaves and RF Magazine - July 2019Document60 pagesMicrowaves and RF Magazine - July 2019arzeszut100% (1)
- Anum Ahmed Pirkani UkDocument5 pagesAnum Ahmed Pirkani UkAnum AhmedNo ratings yet
- Radar Presentation From FreescaleDocument34 pagesRadar Presentation From FreescaleGuang ChenNo ratings yet
- Resume LayoutDocument10 pagesResume LayoutvijaykannamallaNo ratings yet
- High-Power VCSEL Arrays For Next Generation LiDAR SystemsDocument21 pagesHigh-Power VCSEL Arrays For Next Generation LiDAR SystemsJurgen YehNo ratings yet
- Telemetry Tracking and Communication (TT&C) System: CCSDS: Consultative Committee For Space Data SystemsDocument86 pagesTelemetry Tracking and Communication (TT&C) System: CCSDS: Consultative Committee For Space Data SystemsMilk BikisNo ratings yet
- Prestta Wlan Embedded Antenna: Key Benefits Design AdvantagesDocument2 pagesPrestta Wlan Embedded Antenna: Key Benefits Design AdvantagesShyam RamanathNo ratings yet
- JET For Private Networks Brochure ENG WDocument8 pagesJET For Private Networks Brochure ENG WAbdallaNo ratings yet
- ADS Designer - Select Your FlowDocument5 pagesADS Designer - Select Your FlowBUNNGA SARITHNo ratings yet
- GaN TransistorsDocument4 pagesGaN TransistorsDheeraj SharmaNo ratings yet
- AN-RFC2544 Ethernet TestingDocument2 pagesAN-RFC2544 Ethernet TestingDidier SepulvedaNo ratings yet
- 2018 Automotive Mini-Guide Optimized (1) 30Document5 pages2018 Automotive Mini-Guide Optimized (1) 30sreevasNo ratings yet
- Charvat MIT Haystack DIY SARDocument19 pagesCharvat MIT Haystack DIY SARpaulo21No ratings yet
- Ceragon Ip 10r1 Advanced Course Handbook v41 PDFDocument413 pagesCeragon Ip 10r1 Advanced Course Handbook v41 PDFAndreaLugliNo ratings yet
- Practical RF Circuit Design PDFDocument47 pagesPractical RF Circuit Design PDFLOUKILkarimNo ratings yet
- 6.976 High Speed Communication Circuits and Systems Overview of CourseDocument36 pages6.976 High Speed Communication Circuits and Systems Overview of CourseD S V S Sarma ECENo ratings yet
- 5G Cellular User Equipment - From Theory To Practical Hardware DesignDocument18 pages5G Cellular User Equipment - From Theory To Practical Hardware DesignStrauss HexNo ratings yet
- spinNXG P2Document1 pagespinNXG P2Mohammd EssaNo ratings yet
- 2007_Yue_Rodwell_CSIC_short_courseDocument64 pages2007_Yue_Rodwell_CSIC_short_coursePRODYOT SINHANo ratings yet
- Lect 1Document34 pagesLect 1Hermie LagunzadNo ratings yet
- EXFO Anote390 Pic Based Transceiver v1 enDocument10 pagesEXFO Anote390 Pic Based Transceiver v1 enRonald N Meza CNo ratings yet
- Intensive VSAT Field and WIFI Systems EngineeringDocument12 pagesIntensive VSAT Field and WIFI Systems EngineeringImran SadiqNo ratings yet
- DS-334 quantumRADIODocument2 pagesDS-334 quantumRADIOBình Lê vũNo ratings yet
- COM PIA Rack Flyer 2018Document6 pagesCOM PIA Rack Flyer 2018akterkishorNo ratings yet
- 2021 KDPOF Optical Auto Multi Gigabit ScreenDocument23 pages2021 KDPOF Optical Auto Multi Gigabit ScreenAlberto AbarcaNo ratings yet
- High Speed Communication Circuits and Systems Overview of CourseDocument36 pagesHigh Speed Communication Circuits and Systems Overview of CourseAndrea FasatoNo ratings yet
- 2019 JSSC A Single-Chip Optical Phased Array in A Wafer-Scale Silicon Photonics CMOS 3D-Integration PlatformDocument14 pages2019 JSSC A Single-Chip Optical Phased Array in A Wafer-Scale Silicon Photonics CMOS 3D-Integration Platformnxp HeNo ratings yet
- 5G User EquipmentDocument19 pages5G User EquipmentBilalNo ratings yet
- An FPGA Based Control Algorithm For Cascaded Multilevel InvertersDocument5 pagesAn FPGA Based Control Algorithm For Cascaded Multilevel Inverterstham_psdcNo ratings yet
- Single Antenna Interference Cancellation (SAIC) Benefits FunctionalityDocument12 pagesSingle Antenna Interference Cancellation (SAIC) Benefits FunctionalityJuan Pablo Calderon VarelaNo ratings yet
- RF System-In-Package (Rf-Sip) : Enabling Next Generation Rf-Sip Through Flip ChipDocument12 pagesRF System-In-Package (Rf-Sip) : Enabling Next Generation Rf-Sip Through Flip ChipMunir ArshadNo ratings yet
- Design & Analysis of Line Impedance Stabilization Network Using RLC Components For ITE PDFDocument5 pagesDesign & Analysis of Line Impedance Stabilization Network Using RLC Components For ITE PDFEbubekir KeskinkılıçNo ratings yet
- Awr Axiem: SheetDocument4 pagesAwr Axiem: SheetArtur Gomes TuyamaNo ratings yet
- Shanthi Pavan - CT Audio DSM With FIR - JSSC 2014Document11 pagesShanthi Pavan - CT Audio DSM With FIR - JSSC 2014Saleh Heidary ShalmanyNo ratings yet
- Memory Chip Design Using Cadence: A Thesis Submitted in The Partial Fulfilment of The Requirements For The Degree ofDocument41 pagesMemory Chip Design Using Cadence: A Thesis Submitted in The Partial Fulfilment of The Requirements For The Degree ofkruthikah apNo ratings yet
- K5 HuaweiDocument21 pagesK5 HuaweiDang Minh Giap100% (1)
- AN-557 Application NoteDocument27 pagesAN-557 Application NoteEddy TriyonoNo ratings yet
- 5G New Radio - Introduction To The Physical LayerDocument27 pages5G New Radio - Introduction To The Physical LayerrhaudiogeekNo ratings yet
- IP-10G Advanced Course Handbook v3.3Document426 pagesIP-10G Advanced Course Handbook v3.3Fredy benitesNo ratings yet
- IPANema PDFDocument16 pagesIPANema PDFE. 17No ratings yet
- Ceva SolutieDocument39 pagesCeva SolutieAlexandru StefanNo ratings yet
- Articol Disteibuted Data ProcessingDocument7 pagesArticol Disteibuted Data ProcessingAlexandru StefanNo ratings yet
- 77 GHZ Long Range Radar Systems Status, Ongoing Developments and Future ChallengesDocument4 pages77 GHZ Long Range Radar Systems Status, Ongoing Developments and Future ChallengesAlexandru StefanNo ratings yet
- Distibuted Data Processing - Overview: First A. Author, Second B. Author JR., and Third C. Author, Member, IEEEDocument6 pagesDistibuted Data Processing - Overview: First A. Author, Second B. Author JR., and Third C. Author, Member, IEEEAlexandru StefanNo ratings yet
- Distributed Data Processing-Overview: Ing. Podeanu Alexandru-Stefan Ing. Petrica George-CristianDocument5 pagesDistributed Data Processing-Overview: Ing. Podeanu Alexandru-Stefan Ing. Petrica George-CristianAlexandru StefanNo ratings yet
- Articol Disteibuted Data ProcessingDocument9 pagesArticol Disteibuted Data ProcessingAlexandru StefanNo ratings yet
- Distributed Data Processing-: Ing. Podeanu Alexandru-StefanDocument6 pagesDistributed Data Processing-: Ing. Podeanu Alexandru-StefanAlexandru StefanNo ratings yet
- BobinaDocument4 pagesBobinaAlexandru StefanNo ratings yet
- Condensator Data SheetDocument1 pageCondensator Data SheetAlexandru StefanNo ratings yet
- Fisa Date Tehnice ElectroalimentareDocument34 pagesFisa Date Tehnice ElectroalimentareAlexandru StefanNo ratings yet
- Arduino Digital Ammeter Project With Circuit & CodeDocument11 pagesArduino Digital Ammeter Project With Circuit & CodeAlexandru Stefan0% (2)
- HP Deskjet D1600 Printer SeriesDocument13 pagesHP Deskjet D1600 Printer SeriesRizki JuliadiNo ratings yet
- Spider-81 Hardware Spec 7.7Document7 pagesSpider-81 Hardware Spec 7.7KonradNo ratings yet
- The Evolution of Video Streaming and Digital Content DeliveryDocument8 pagesThe Evolution of Video Streaming and Digital Content DeliveryBrookings InstitutionNo ratings yet
- Process Flow Chart - Manufacturing TS: Rejected, Sent Back To SupplierDocument1 pageProcess Flow Chart - Manufacturing TS: Rejected, Sent Back To Suppliersukumar bhowmickNo ratings yet
- 1 Kawasaki FSDocument16 pages1 Kawasaki FSmatgoffNo ratings yet
- Electronics Cooling: Mechanical Power Engineering DeptDocument22 pagesElectronics Cooling: Mechanical Power Engineering DeptneilNo ratings yet
- Pablocastillo PDFDocument44 pagesPablocastillo PDFPabloNo ratings yet
- Chapter8-Campuran Pada Tingkat Molekuler - Part 1Document58 pagesChapter8-Campuran Pada Tingkat Molekuler - Part 1Uswatun KhasanahNo ratings yet
- Is-Cal01 Design Carbon Accounting On Site Rev.02Document6 pagesIs-Cal01 Design Carbon Accounting On Site Rev.02shoba9945No ratings yet
- SOM016 - Hook Release System For Life Boats. Norsafe TOR mk2.Document20 pagesSOM016 - Hook Release System For Life Boats. Norsafe TOR mk2.arfaoui salimNo ratings yet
- Perdev Module 3Document13 pagesPerdev Module 3Renelyn JacoNo ratings yet
- NASA NOAA Earth Sciences Letter To TrumpDocument6 pagesNASA NOAA Earth Sciences Letter To TrumpMelissa Meehan BaldwinNo ratings yet
- ISA - Study Guide Table of ContentsDocument3 pagesISA - Study Guide Table of Contentsasdf123asdfasdfNo ratings yet
- Tiny Talk 2 Teacher's BookDocument15 pagesTiny Talk 2 Teacher's BookAtena RaeisiNo ratings yet
- New WITTMANN Robots For Large and Small Injection Molding MachinesDocument4 pagesNew WITTMANN Robots For Large and Small Injection Molding MachinesMonark HunyNo ratings yet
- South Africa Hard Copy Lit 2Document20 pagesSouth Africa Hard Copy Lit 2Jennifer Española BernalNo ratings yet
- Synchronous Generators: Instructional ObjectivesDocument18 pagesSynchronous Generators: Instructional Objectivessanthosh2009No ratings yet
- Psychoanalythic TheoryDocument1 pagePsychoanalythic TheorySilver BroochNo ratings yet
- CD Dye RD0005Document7 pagesCD Dye RD0005Juan CarlosNo ratings yet
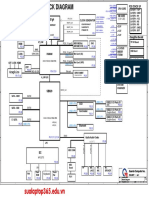
- Da0bl7mb6d0 Rev DDocument44 pagesDa0bl7mb6d0 Rev DFerreira da CunhaNo ratings yet
- MG 2 - TEMA 1 Limba EnglezaDocument4 pagesMG 2 - TEMA 1 Limba Englezamimi12345678910No ratings yet
- Tac85 11Document32 pagesTac85 11TateNo ratings yet
- COMPRE - MODULE 4 (Pharmacology and Toxicology) : Attempt ReviewDocument40 pagesCOMPRE - MODULE 4 (Pharmacology and Toxicology) : Attempt ReviewLance RafaelNo ratings yet
- Uremic EncephalophatyDocument48 pagesUremic EncephalophatySindi LadayaNo ratings yet
- Asme A13.1 - 1996Document27 pagesAsme A13.1 - 1996lohv100% (1)