Download as pdf or txt
You might also like
- Ceylon-Almanac-And-Annual-register 1856 - William Skeen, Government Printer, Colombo CeylonDocument413 pagesCeylon-Almanac-And-Annual-register 1856 - William Skeen, Government Printer, Colombo CeylonAPEPOTH100% (6)
- UCLA Astronomy 3 Practice ExamDocument7 pagesUCLA Astronomy 3 Practice ExamSharon XuNo ratings yet
- How To Make and Use TalismansDocument55 pagesHow To Make and Use TalismansPeterMarquez100% (2)
- Sulfur of MetalsDocument3 pagesSulfur of MetalstravellerfellowNo ratings yet
- Achieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisDocument16 pagesAchieving High-Precision Pointing On Exoplanetsat: Initial Feasibility AnalysisMatias LipskerNo ratings yet
- In-Situ AbstDocument5 pagesIn-Situ AbstFahim MunawarNo ratings yet
- Star Identification Using Neural NetworksDocument10 pagesStar Identification Using Neural NetworksMarcus MacêdoNo ratings yet
- NASA Innovative Advanced Concepts (NIAC) Phase II 80HQTR18NOA01 - 18NIAC-A2Document91 pagesNASA Innovative Advanced Concepts (NIAC) Phase II 80HQTR18NOA01 - 18NIAC-A2Ninad ChothaniNo ratings yet
- AAS 03-003 The Inertial Stellar Compass: A Multifunction, Low Power, Attitude Determination Technology BreakthroughDocument18 pagesAAS 03-003 The Inertial Stellar Compass: A Multifunction, Low Power, Attitude Determination Technology BreakthroughSmarth SareenNo ratings yet
- A Stereo-Vision System For Support of Planetary Surface ExplorationDocument10 pagesA Stereo-Vision System For Support of Planetary Surface ExplorationwangjianpingsdNo ratings yet
- Front-Vs Back-Illuminated CCD Cameras For Photometric Surveys: A Noise Budget AnalysisDocument4 pagesFront-Vs Back-Illuminated CCD Cameras For Photometric Surveys: A Noise Budget Analysisvideo76No ratings yet
- Round Table On Instrumentation and Data ProcessingDocument13 pagesRound Table On Instrumentation and Data ProcessingN. SWAROOP KUMARNo ratings yet
- Investigation of Malaysian Low Earth Orbits For ReDocument10 pagesInvestigation of Malaysian Low Earth Orbits For Remaudira aNo ratings yet
- Cubesat Deformable Mirror Demonstration: CitationDocument12 pagesCubesat Deformable Mirror Demonstration: CitationjonNo ratings yet
- CCD Imager Development For AstronomyDocument21 pagesCCD Imager Development For Astronomysd6433No ratings yet
- Block-Matching Sub-Pixel Motion Estimation From Noisy, Under-Sampled Frames - An Empirical Performance EvaluationDocument10 pagesBlock-Matching Sub-Pixel Motion Estimation From Noisy, Under-Sampled Frames - An Empirical Performance Evaluationjuan.vesaNo ratings yet
- Sensors For Space ApplicationsDocument6 pagesSensors For Space Applicationsamiriut97No ratings yet
- Image Processing For Near Earth Object Optical Guidance SystemsDocument16 pagesImage Processing For Near Earth Object Optical Guidance SystemsNamith DevadigaNo ratings yet
- 1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeDocument2 pages1067.pdf Eighth International Conference On Mars (2014) : Telescope Characteristics. A Trade-Off Exists BeJunior MirandaNo ratings yet
- Derivation of Mean Orbital Altitude of A Spacecraft by Use of Optical Imaging TechniquesDocument8 pagesDerivation of Mean Orbital Altitude of A Spacecraft by Use of Optical Imaging TechniquesDunareanu AvraamNo ratings yet
- Scalable Trajectory Optimization Based On Bézier CurvesDocument10 pagesScalable Trajectory Optimization Based On Bézier CurvesAnonymous jGOFh2V0hNo ratings yet
- Imaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueDocument7 pagesImaging Radar Simulation in Realistic Environment Using Shooting and Bouncing Rays TechniqueAsd DsaNo ratings yet
- DMSQUARE TAUP Proceedings v2Document5 pagesDMSQUARE TAUP Proceedings v2ignacioavNo ratings yet
- On The Practical Implementation of A Geometric Voting Algorithm For Star TrackersDocument8 pagesOn The Practical Implementation of A Geometric Voting Algorithm For Star TrackersabwickesNo ratings yet
- Sun Et Al 2004Document4 pagesSun Et Al 2004api-39598022No ratings yet
- 91473T PDFDocument7 pages91473T PDFHORAXCIOUSNo ratings yet
- Haw 2002Document12 pagesHaw 2002Roman TilahunNo ratings yet
- 286 BaccichetDocument9 pages286 BaccichetGautam DhargalkarNo ratings yet
- Robust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingDocument6 pagesRobust Pose Estimation of Moving Objects Using Laser Camera Data For Autonomous Rendezvous & DockingKien Nguyen TrungNo ratings yet
- Improving Free-Space Optical Communication With Adaptive Optics For Higher Order ModulationDocument7 pagesImproving Free-Space Optical Communication With Adaptive Optics For Higher Order Modulationalu0100353662No ratings yet
- The Star Probe ProposalDocument3 pagesThe Star Probe ProposalFundamentalModelNo ratings yet
- Obstacle Detection For Unmanned Ground Vehicles:: A Progress ReportDocument14 pagesObstacle Detection For Unmanned Ground Vehicles:: A Progress ReportPrasenjit SahaNo ratings yet
- Vision-Aided Inertial Navigation For PPLDocument8 pagesVision-Aided Inertial Navigation For PPLmeng775928yuNo ratings yet
- Analytical SRP Model For GLONASS Initial ResultsDocument10 pagesAnalytical SRP Model For GLONASS Initial ResultsEndless LoveNo ratings yet
- Example Good Proposal PDFDocument16 pagesExample Good Proposal PDFzamdinaNo ratings yet
- Get Focused Pre PrintDocument7 pagesGet Focused Pre PrintKonstantinos ChrisNo ratings yet
- Autonomous On-Orbit Calibration of A Star Tracker CameraDocument8 pagesAutonomous On-Orbit Calibration of A Star Tracker Camerayuhan120483No ratings yet
- SNAP Satellite Focal Plane DevelopmentDocument10 pagesSNAP Satellite Focal Plane DevelopmentDiliyanzah AsriNo ratings yet
- CubeSat Attitude Determination Via Kalman Filtering of MagnetometDocument10 pagesCubeSat Attitude Determination Via Kalman Filtering of MagnetometAyech NabilNo ratings yet
- Geometric Validation of Cartosat 1 ImageDocument6 pagesGeometric Validation of Cartosat 1 ImageCatalina peña castellanosNo ratings yet
- Department of Physics, University of Maryland College Park, MD, USADocument9 pagesDepartment of Physics, University of Maryland College Park, MD, USAUmav24No ratings yet
- Co-Registration of Optically Sensed Images and CorDocument5 pagesCo-Registration of Optically Sensed Images and CorGhefraNo ratings yet
- Timothy Lee, Multiple Sensor Indoor Mapping Using A Mobile Robot - 2Document5 pagesTimothy Lee, Multiple Sensor Indoor Mapping Using A Mobile Robot - 2Gires TakamNo ratings yet
- Performance Analysis of Space Suirvellance and Tracking Systems in LEODocument10 pagesPerformance Analysis of Space Suirvellance and Tracking Systems in LEOFrancisco CarvalhoNo ratings yet
- Wilson, Roberts - International Conference On Space Optical Systems and Applications (ICSOS) - 2014 - Recent Developments in Adaptive OpDocument5 pagesWilson, Roberts - International Conference On Space Optical Systems and Applications (ICSOS) - 2014 - Recent Developments in Adaptive OpEdoardo AlbertiNo ratings yet
- JWST Scientific CapabilitiesDocument8 pagesJWST Scientific CapabilitiesAakif AmeenNo ratings yet
- Mars Curiosity Rover CamerasDocument17 pagesMars Curiosity Rover CamerasAviation/Space History LibraryNo ratings yet
- 2458 An Autonomous Robotic System For Mapping Abandoned MinesDocument8 pages2458 An Autonomous Robotic System For Mapping Abandoned Minestungbk123No ratings yet
- S. B. Mende Et Al., 2000Document28 pagesS. B. Mende Et Al., 2000Neil BiswasNo ratings yet
- Calibration and Testing of A Terrestrial Laser Scanner: D. D. Lichti, M. P. Stewart, M. Tsakiri and A. J. SnowDocument8 pagesCalibration and Testing of A Terrestrial Laser Scanner: D. D. Lichti, M. P. Stewart, M. Tsakiri and A. J. SnowRachmad AgungNo ratings yet
- Nano Satellite OverviewDocument8 pagesNano Satellite Overviewssiddiqi6No ratings yet
- ECE S508 Question BankDocument2 pagesECE S508 Question BankMMhammed AlrowailyNo ratings yet
- Edz Clusters Young cr38 - enDocument5 pagesEdz Clusters Young cr38 - enJorge Raul JjaramilloNo ratings yet
- Attitude Estimation PDFDocument9 pagesAttitude Estimation PDFbendisudhakar3536No ratings yet
- Estimating The GNSS Broadcast Ephemeris Error - PaperDocument4 pagesEstimating The GNSS Broadcast Ephemeris Error - PaperSebastian CiubanNo ratings yet
- 144kmFreeSpace Distribution of EntanglementDocument10 pages144kmFreeSpace Distribution of EntanglementpruevaNo ratings yet
- 1 2 Autonomous Mobile Robots: © 2006 by Taylor & Francis Group, LLCDocument15 pages1 2 Autonomous Mobile Robots: © 2006 by Taylor & Francis Group, LLCmyilbvnNo ratings yet
- Precise Orbit Determination of Low Earth Satellites Using SST Data - 1997 - Advances in Space ResearchDocument4 pagesPrecise Orbit Determination of Low Earth Satellites Using SST Data - 1997 - Advances in Space ResearchFabio HochleitnerNo ratings yet
- B-Scan GPR Sar ImagingDocument7 pagesB-Scan GPR Sar ImagingKöksalİçözNo ratings yet
- Cascades Design Review DocumentDocument29 pagesCascades Design Review DocumentkgrhoadsNo ratings yet
- Kreidberg 2015 PASP 127 1161Document5 pagesKreidberg 2015 PASP 127 1161Hernan CcompiNo ratings yet
- Direct Measurement of The Size of The Large Kuiper Belt Object (50000) QuaoarDocument5 pagesDirect Measurement of The Size of The Large Kuiper Belt Object (50000) QuaoarSergio Salazar LatorreNo ratings yet
- Dark Energy Survey DES CollaborationDocument38 pagesDark Energy Survey DES CollaborationgeorgcantorNo ratings yet
- Evaluation of Die Swell and Volumetric Expansion in Corn Meal Extrudates'Document20 pagesEvaluation of Die Swell and Volumetric Expansion in Corn Meal Extrudates'Satyam AgrahariNo ratings yet
- Characterization of The Swelling of Starch Doughs During ExtrusionDocument16 pagesCharacterization of The Swelling of Starch Doughs During ExtrusionSatyam AgrahariNo ratings yet
- Relation Between A Function of The Right Ascension and The Angular Distance To The Vertex For Hyades StarsDocument8 pagesRelation Between A Function of The Right Ascension and The Angular Distance To The Vertex For Hyades StarsSatyam AgrahariNo ratings yet
- Applicant Details: Direct Recruitment Soil Conservation Ranger, Soil Conservation DepartmentDocument2 pagesApplicant Details: Direct Recruitment Soil Conservation Ranger, Soil Conservation DepartmentSatyam AgrahariNo ratings yet
- Xoplanet LabDocument13 pagesXoplanet LabSatyam AgrahariNo ratings yet
- Detecting Planets Around Very Low Mass Stars With The Radial Velocity MethodDocument12 pagesDetecting Planets Around Very Low Mass Stars With The Radial Velocity MethodSatyam AgrahariNo ratings yet
- Vibratiional Spectra Part2 ePGPathshalaDocument23 pagesVibratiional Spectra Part2 ePGPathshalaSatyam AgrahariNo ratings yet
- Introduction To Solid State Physics: Crystal StructuresDocument23 pagesIntroduction To Solid State Physics: Crystal StructuresSatyam AgrahariNo ratings yet
- UNIT-III: Vibrational-Rotational SpectraDocument10 pagesUNIT-III: Vibrational-Rotational SpectraSatyam AgrahariNo ratings yet
- Habitable ZoneDocument7 pagesHabitable ZoneSatyam AgrahariNo ratings yet
- ExoplanetDocument26 pagesExoplanetSatyam AgrahariNo ratings yet
- Mark Wildon - Representation Theory of The Symmetric Group (Lecture Notes) (2015)Document34 pagesMark Wildon - Representation Theory of The Symmetric Group (Lecture Notes) (2015)Satyam Agrahari0% (1)
- Lecture Notes On Lie Algebras and Lie Groups: Luiz Agostinho FerreiraDocument150 pagesLecture Notes On Lie Algebras and Lie Groups: Luiz Agostinho FerreiraSatyam AgrahariNo ratings yet
- Assignment 2: 1. If Г is a representation of a group G, show that Г* (whose matrices are complex conjugatesDocument1 pageAssignment 2: 1. If Г is a representation of a group G, show that Г* (whose matrices are complex conjugatesSatyam AgrahariNo ratings yet
- Lee 2013 Habitable Zone Around StarsDocument7 pagesLee 2013 Habitable Zone Around StarsSatyam AgrahariNo ratings yet
- Ex ExpPhys V WS2006 07ENDocument15 pagesEx ExpPhys V WS2006 07ENSatyam AgrahariNo ratings yet
- 2SM Unit1 2 PDFDocument19 pages2SM Unit1 2 PDFSatyam AgrahariNo ratings yet
- Star Wars CCG Cards - 13 Reflections III SpoilersDocument5 pagesStar Wars CCG Cards - 13 Reflections III SpoilersmrtibblesNo ratings yet
- DraconiansDocument13 pagesDraconiansJohnette RicchettiNo ratings yet
- Giovanni Battista Benedetti On The Mathematics of Linear PerspectiveDocument30 pagesGiovanni Battista Benedetti On The Mathematics of Linear PerspectiveEscápate EscaparateNo ratings yet
- Compound Pendulum 2016Document5 pagesCompound Pendulum 2016Mubashar Fareed100% (1)
- Eclipses: Varahamihira Has Described at Length The Results of Eclipses. AccordingDocument2 pagesEclipses: Varahamihira Has Described at Length The Results of Eclipses. Accordingmadhu77No ratings yet
- The Origin of The Solar SystemDocument29 pagesThe Origin of The Solar SystemCza VerwinNo ratings yet
- JWST DTA Stepper Motor Anomaly and Lessons Learned-7!23!15Document8 pagesJWST DTA Stepper Motor Anomaly and Lessons Learned-7!23!15anhntran4850No ratings yet
- AnagramDocument7 pagesAnagramDasika SunderNo ratings yet
- Egyptian AstronomyDocument5 pagesEgyptian Astronomyss13No ratings yet
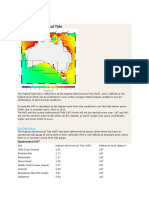
- CHART DATUM-Highest Astronomical TideDocument3 pagesCHART DATUM-Highest Astronomical TideJoeven OquendoNo ratings yet
- Shalva Mardi & Rosemary Mardi The Irony and Humour of The Wise, The Wisest Made Wiser by WisdomDocument260 pagesShalva Mardi & Rosemary Mardi The Irony and Humour of The Wise, The Wisest Made Wiser by WisdomshalvamardiNo ratings yet
- Tugas Portofolio Inggris Disusun OlehDocument5 pagesTugas Portofolio Inggris Disusun OlehNabila cheeksNo ratings yet
- WWW Astrologyweekly Com Astrological Aspects Novile 9th HarmDocument6 pagesWWW Astrologyweekly Com Astrological Aspects Novile 9th HarmtratakNo ratings yet
- Open Cloze Tests: Wife Until Made Pask Lesson No As Said For BehindDocument6 pagesOpen Cloze Tests: Wife Until Made Pask Lesson No As Said For BehindHạo TăngNo ratings yet
- Vedic Chart PDFDocument1 pageVedic Chart PDFPramod MurthyNo ratings yet
- FisikaDocument12 pagesFisikaMuhammad AriefNo ratings yet
- Casting A Chart: Panchanga Method: EducationDocument6 pagesCasting A Chart: Panchanga Method: EducationDvs RameshNo ratings yet
- Kelompok 8 Arda, Dhea, Nabilla, TariDocument3 pagesKelompok 8 Arda, Dhea, Nabilla, TariSlamet MunawarNo ratings yet
- Angelic Activation PDFDocument5 pagesAngelic Activation PDFsubzNo ratings yet
- Navigation 224 DepartmentalsDocument7 pagesNavigation 224 DepartmentalsJohn Ronnel Bulawan100% (1)
- Orbit NotesDocument23 pagesOrbit Notesrouter001No ratings yet
- Blue MoonDocument1 pageBlue MoonCarlos CarreteroNo ratings yet
- Chart Yogesh KumarDocument54 pagesChart Yogesh KumarYogesh100% (1)
- Gravitational FieldDocument30 pagesGravitational FieldAng Yu LongNo ratings yet
- Geography PamphletDocument2 pagesGeography Pamphletapi-333368475No ratings yet
- Me Els 11 - 12 Q1 0102 PSDocument23 pagesMe Els 11 - 12 Q1 0102 PSRichel Valerio QuintiaNo ratings yet