Professional Documents
Culture Documents
SM 2035 A
SM 2035 A
Uploaded by
ajc2_1984Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
SM 2035 A
SM 2035 A
Uploaded by
ajc2_1984Copyright:
Available Formats
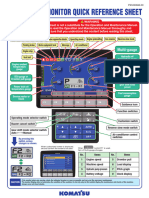
AUTOPILOT NP2015/2025
Service Manual Autopilot
ECONOMY/ BASIC
PRECISION
Opens a temporary · Status indication · Alphanumeric line,as text line · Display for heading
Modification of the parameter group indicates the adjusted or bar graph representing for the indication · Command key
parameter Modification of the temporary heading sensor heading difference indication
Switches to operate mode Course Control (Heading
Yawing parameter group (heading/set course (preset heading)
Control )(LED lights up).
Rudder Preadjustment for preparing or
Cnt.Rudder varying a parameter group
(M1..M6) · Commnad key
Switches to operating mode Track Control (LED lights up).
Only possible in conjunction with external track planning
system or navigation receiver.
Display indicates the Display for the Course
current operating mode numerical assignment of Control · Comand key
E for Economy the parameter groups Heading Switches to operating mode R.o.T Control
P for Precision
”Rate--of--Turn” (LED lights up).
Gyro Only possible in conjunction with an external R.o.T tiller.
Track
Magnet Control
Change over to the Calling up a parameter
operating mode group (M1...M6) · Determines the type of heading change manoeuvre.
Para-- -- Heading change via a determined radius value (LED lights up)
Economy or Precision. Quick--Tune R.o.T.
meter or
Tiller
-- Heading change via a determined R.o.T limit value
(LED lights up)
Control Radius
· Indication of the current
Preset Set Course R.o.T. · Status indication, indicates REMOTE operation
heading sensor
· Indication of log sensor
· Indication of the manual
speed adjustment
· The flashing LED signalizes an action
· Presetting for Sensor
Extern which will be stored or effective only
-- Heading sensor selection
-- manual speed selection when acknowledged.
· Synchronization between
heading sensor and NP2015
(only with fine shaft transmission) Limits
Values Set
· Indication or presetting for · Acknowledges the audible alarm. LED shows red.
-- Rudder Lim ...° Display
The alrm mesage is stored.
-- Off Heading ...° · Screening the stored alarm messages. All alarm messages are
-- Rot ...°/Min cyclically indicated via the text line.
-- Radius ...NM Select
-- Rud. Lim ...m
-- Ship Load ...%
· Dimmer for key and display illumination.
· Modification of parameter values.
· Fading out the text line · Display for heading indication. Shows: · Set course (preset heading) presetting in · Selection of heading sensor.
(except for not acknowledged alarm -- in the operting mode Course Control conjunction with the SET key · Lamp test (both keys to be actuated
messages) (Heading Control) der SET Taste simultaneously
· Fading in a continous text or bar the set course (preset heading) (only possible in the operating mode Course Control
graph representation; -- in the operating mode Track Control (Heading Control)
-- Heading difference indication as the track course · Direct set course (preset heading) presetting
bar graph representation in the -- in conjunction with a R.o.T. tiller For this method, the rotary knob is first to be pressed
operating mode of Course Control the heading and then readjusted. The set course (preset heading) The membrane keyboard
(Heading Control) --in the passive state of device (OFF) alteration is effective immediately! must never be operated by a
-- Track eerror (XTE) in the operating the heading Direct set course (preset heading) presetting
mode of Track Control interrupts track control pointed object (ball point pen,
-- Manually adjusted speed pencil etc.)!
-- Set course (preset heading) with
1/10 °indication
Anzeige
-- Set rudder position in °
Edition: Apr 15, 2002 Annex 1--1 3578E/102--886/885.DOC032
AUTOPILOT NP2015/2025
Autopilot
Service Manual
Text Line Signification Possible Value Text Line Signification Possible value
from/to from / to
Changing a parameter value results in a
Yawing : 2 1/6 Rud. Limit 30° Defines rudder limitation 5 / 30°
temporary parameter group. Yawing
defines the possible yaw angle and, ......
......
therefore, the accuracy of heading con- Operating mode Heading Control.
trol. Off Heading 6° Defines the heading error alarm 5 / 30°
Rudder : 5 1/9 theshold (applicable to all
Rudder defines the proportional sensitiv-
...... ...... NP2015/2025 operating modes)
ity of the heading controller.
Cnt. Rudder defines the differential com- Operating mode Track Control.
Cnt.Rudder : 5 ponent of the heading controller with 0/9 Course Trim 5° Defines the drift correction 5 / 30°
...... adequate counter--rudder effect. ...... (applicable to all NP2015/2025 oper-
ating modes)
Defines the rate of turn, by which a
ECONOMY / PRECISION R.o.T. 30°/Min course change manoeuvre is performed 005 / 500°/min
......
Select Text Line Signification Display Defines the turning circle radius for a
Radius 0.5NM course change manoeuvre 0,1 / 5NM
......
Economy / Precision Selection of the operating mode Defines the alarm threshold for the X--
Track Lim 556m track range in the operating mode of 0010 / 2000m
...... Track Control
Defines the angular value by which
Rud. Trim 0° the rudder blade is turned away from P35°..0 /0.. S35°
OUICK- TUNE ...... the midship position.
Defines the case of the variance ad-
Text Line Signification Display Ship load 40% justment. 10 .........100%
M1 : Y2 R5 CR5 Selection of a parameter group
Quick--Tune
Text Line Signification
M6 : Y-- R-- CR --
................................ Text line without contents
Tendency indication for the preset headind
Text Line Signification with Heading Control
Man: + 17, 2 sel Manual speed
Mag Gyro: 144.2 Request for selection of heading sensor
Preset heading with 1/10° indication and set-
PresetHDG: . . . 098,0 ° ting possibility
Man: + 17.2 kts sel Request for manual speed adjustment Track deviation in NM, on the right or on the
...... XTD: | 0.29NM left of the track (only possible in the operating
mode of track control). In this description, a
Log: + ----.-- kts Indication of log sensor data track deviation of 0.29NM to the right of the
...... track is shown
Indication appears only with a heading Setrudder: P 10 ° Current rudder position.
Synchr: ------.-- sensor without coarse shaft or in case of P for Port, S for Starboard
...... a disturbance in transmission.
Request for synchronization between
heading sensor and autopilot.
Edition: Apr 15, 2002 Annex 1--2 3578E/102--886/885.DOC032
AUTOPILOT NP2015/2025
Service Manual Autopilot
I/O PCB
CPU--PCB
102--880.101 with Follow Up control
Terminal board L1 Terminal board L2
24 VDC
Power supply
Switching valve output I
Switching valve output II
Status input
Status/Alarm Output
Rate Gyro
serial R.O.T--Tiller
NB03-- LOG
886
Standard Course Bus / Step / Synchro
Steering select 24 V
actual rudder 1/2
(feedback)
Set rudder 1
Set rudder 2
Operatot unit bus
-- NAV--RECEIVER
Standard (NMEA0183) -- ECDIS
-- Digital Repeater
Systemoption
(DV--BUS)
System--
connection**
**Systemconnection:
ECDIS, NAUTOCONNING
Operator unit NP2000
Edition: Apr 15, 2002 Annex 1--3 3578E/102--886/885.DOC032
AUTOPILOT NP2035
Service Manual Autopilot
Physically arrangement of terminal contacts
DV--Bus --> (NP2015/2025/2035) Terminal board L1 Terminal board L2
ECDIS Test interface NP2035 Operator unit NP2015/25/35
49.......................72 43.......................63
Tx/Rx Tx/Rx Tx/Rx Tx/Rx
Tx+ Tx-- Rx+ Rx-- GND Case Transfer Modul serial Tx+ Tx-- Rx+ Rx-- GND Case Tx+ Tx-- Rx+ Rx-- GND Case Transfer Modul serial Tx+ Tx-- Rx+ Rx-- GND Case
25.......................48 22.......................42
NB05--343 NB05--343
1.........................24 1.........................22
1 2 3 4 5 6 1 2 3 4 5 6 1 2 5 6 1 2 3 4 5 6
ws gn br
Track(GPS, ECDIS, DV--Bus)
ECDIS Connection Nav. Data serial out
L1 see figure 2, Plug B2 of Operator unit
Rud1 out Rud2 out Tiller 1 Tiller 2 Tiller 3 RoT Tiller RoT Sensor Rud Feedback Rud 2 In Mag Sonde Mag/Speed Syst Fail Off Hdg Hdg Mon Out 1 Out 2 Out 3 Out 4 Out 5
ON REF RUD 0V +15V ON REF RUD 0V +15V ON REF RUD 0V +15V +10V W --10V In +10V W 0V --10V In R1 R2 S1 S2 S3 RX RX--
+
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72
sw ws ge gn bn
Service installation
only not used not used
Follow--up
adjustment
Override ON
Alarm Level 2
Tiller defective
Operator Unit
Failure
RoT--Sensor
Set rudder
Set rudder
out
SYS FAIL
GND
Alarm Level 1
Heading
Monitor
Track ON
OFF Heading
and/or
Heading
Monitor
OFF Heading
RoT--Tiller ON
Remote Tiller
active
Magnet ON
RS 422
RoT--Tiller to L2.22,23,24 ® L2.26,27,28,29,30
5 +10V
Rudder 1 or
Feedback Unit
7 --10V
Magnetic Sonde
NMEA 183 NMEA 183 Heading
HCHDT or HEHDT Synchro 1°
Rate of Turn Sperry Step
GPHDT
Magnetic 1/6°
4800 Bd
FU--Amplifier
139--152/--153
Rudder 1
FU--Amplifier
139--152/--153
Rudder 2
Compass Step
Rudder Feedback Unit <= 100ms
101--528 .....
(actually not possible)
Gyro
Rudder
Course bus
Feedback
or +10V
W
or
--10V
Heading Heading
139--155
139--155
from Magnetic compass from Gyro Compass or GPS--Compass
FU--Amplifier
139--152/--153
Rudder 1
FU--Amplifier
139--152/--153
Rudder 2 NMEA VTG
NMEA VHW
NMEA VBW
Speed input
Figure 1: Connection on terminal board L1
Edition: Dec. 19, 2002 Annex 1--4 3578E/102--886/886.DOC032
AUTOPILOT NP2035
Service Manual Autopilot
From Heading input See figure 1
Gyro Course Bus Sperry Step Rud Ind Rud Ind NavData In/out Physically arrangement of terminal contacts
RX+ RX-- GND R1 R2 S1 S2 S3 RX+ RX-- TX-- TX+
L2 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42
Terminal board L1 Terminal board L2
Not accepted for 49.......................72 43.......................63
actual Rudder Indication not used
25.......................48 22.......................42
Gyro
M. Valve 1 M. Valve 2 +10...32V 0V Sperry Step 1.........................24 1.........................22
+ STBD -- + PORT -- + STBD -- + PORT -- POWER SUPPLY (Synchro 1°)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 (actually not possible) I/O PCB
L2
+24V
--In 1------In 2----------In 3----------In4----------In 5------------In 6----------P.Log--
Port Port
0V1
STB STB
Auto on In 1 In 2 In 3 In 4 In 5 In 6 P.Log NMEA 2000
+ -- CANH CANL
L2 43 44 45 46 47 48 51 52 53 54 55 56 57 58 59 60 61 62 63
49 50
Valve 1 Valve 2
WN219--401 not connected
+24V* Com +24V Com
Operator unit
+24V
Slack 2
selected)
M. Valve 1 M. Valve 2 B2
102--886
+ STBD -- + PORT -- + STBD -- + PORT -- Handwheel
serial
1 2 3 4 5 6 7 8 9 10 11 12
(ON
0V B5 Supply
STB Port STB Port 24VDC operator
+24V unit
NB60--053 B3
serial
Auto
139--152/--153
remote (external)
ON/OFF
Valve 1 Valve 2 B6 L4.3
Puls Log
24VDC
+24V * Com +24V Com L4.6 Valve I
Set rudder 1
105--30x
* Autopilot ON/OFF Steering L4.7
Override Signal Unit
Remote Tiller
selection rudder 1
(rudder 1 not active contact closed) L5.2 Hand/
Remote Tiller ON/OFF
Auto Valve II
L5.3
2. Bridge Remote Tiller selection
2 3
1
Pump 2 ON
Pump 1 ON
4
139--152/--153
Selector Hand
switch
Auto
+24V 1 NFU Set rudder 2
2 FU
3 Auto connected as
4 Remote L1 above mentioned
see figure 1 70 71 72
to Figure 1 , Transfer Modul serial NB05--343, Operator Unit NP2015/25/35
I/O PCB
Operator bus
6A
Ship‘s Mains
+24 V Remote Tiller ON Figure 2: Connection on Terminal board L2
Edition: Dec. 19, 2002 Annex 1--5 3578E/102--886/885.DOC032
You might also like
- Navipilot V HSC PDFDocument12 pagesNavipilot V HSC PDFlucas barriosNo ratings yet
- Feasibility StudyDocument5 pagesFeasibility StudyKath Garcia50% (4)
- Test Exer 6Document3 pagesTest Exer 6Uratile PatriciaNo ratings yet
- Driving With ... : Iveco Stralis - Eurotronic 2Document18 pagesDriving With ... : Iveco Stralis - Eurotronic 2BroCactus100% (2)
- YaskawaDocument375 pagesYaskawaCristian IozsaNo ratings yet
- Research Methods For Architecture Ebook - Lucas, Ray - Kindle Store PDFDocument1 pageResearch Methods For Architecture Ebook - Lucas, Ray - Kindle Store PDFMohammed ShriamNo ratings yet
- Online Voting System SRSDocument7 pagesOnline Voting System SRSSanthosh KumarNo ratings yet
- CVT Mitsubishi 1 PDFDocument12 pagesCVT Mitsubishi 1 PDFGustavo PerronNo ratings yet
- Global: Project View Pat LengthDocument3 pagesGlobal: Project View Pat Lengthtytech7No ratings yet
- MASCHINE JAM 2.6.5 Cheat Sheet English 0517Document3 pagesMASCHINE JAM 2.6.5 Cheat Sheet English 0517Anthony Van HamondNo ratings yet
- Peak 150Document4 pagesPeak 150scarface666No ratings yet
- Starvert: New Micro Size Drive of LS Industrial SystemsDocument24 pagesStarvert: New Micro Size Drive of LS Industrial Systemsdiyanorm2020No ratings yet
- RT522 92 - 96Document5 pagesRT522 92 - 96muhamad iqbalNo ratings yet
- Variable Speed Drives: SeriesDocument6 pagesVariable Speed Drives: SeriesfreddyjoertyNo ratings yet
- Variable Speed Drives: SeriesDocument6 pagesVariable Speed Drives: SeriesfreddyjoertyNo ratings yet
- Ie5 SeriesDocument24 pagesIe5 Seriesloggy627No ratings yet
- Variable Speed Drives: SeriesDocument6 pagesVariable Speed Drives: SeriesfreddyjoertyNo ratings yet
- MC#1 Turret-WS Manual2Document21 pagesMC#1 Turret-WS Manual2prithwirajroyNo ratings yet
- Quantrol LC100 / LC200 / LC300: Universal PID Controller SeriesDocument2 pagesQuantrol LC100 / LC200 / LC300: Universal PID Controller SeriesSamir SabicNo ratings yet
- 701a DSCDocument4 pages701a DSCLiv SeguraNo ratings yet
- Instruction AnualDocument5 pagesInstruction Anualprivate 2No ratings yet
- ND 930 ND 970: User S ManualDocument47 pagesND 930 ND 970: User S ManualCireno MacedoNo ratings yet
- TNC 370Document333 pagesTNC 370Олександр СапаровNo ratings yet
- ACF624 680and625manualsDocument2 pagesACF624 680and625manualsGreg OneofakindNo ratings yet
- 11a Vs300 Quick Guide en v2.10 EagDocument4 pages11a Vs300 Quick Guide en v2.10 Eagmoh taNo ratings yet
- Sieps80000093c 4 0Document410 pagesSieps80000093c 4 0Vòng Huy HoàngNo ratings yet
- Motors - Stepper, BLDC, DCRDocument46 pagesMotors - Stepper, BLDC, DCRSaurabh Shukla100% (1)
- Sieps80000098c 2 0 PDFDocument363 pagesSieps80000098c 2 0 PDFCarlos RuizNo ratings yet
- Sieps80000046l 20 1Document384 pagesSieps80000046l 20 1Ananthu UnnikrishnanNo ratings yet
- Peak® 150: Digital Control For Steam TurbinesDocument4 pagesPeak® 150: Digital Control For Steam TurbinesgerardoNo ratings yet
- Yokogawa UT35-UT32A - Part3Document2 pagesYokogawa UT35-UT32A - Part3Fajar PrawiroNo ratings yet
- Pen00349 00Document2 pagesPen00349 00mikhail.glotovNo ratings yet
- 9IS54376-1 EWRC 300 500 NT QuickStart EN 11141006231377Document14 pages9IS54376-1 EWRC 300 500 NT QuickStart EN 11141006231377Νικόλας ΧιονάςNo ratings yet
- LC 200 Transfer Case WorkingDocument13 pagesLC 200 Transfer Case WorkingAbdulla AmarNo ratings yet
- Eex4436 DP 2023 V2Document22 pagesEex4436 DP 2023 V2dinesh.sudasingheNo ratings yet
- 1815 BrochureDocument4 pages1815 BrochureViliame D RoqicaNo ratings yet
- Number: SJG 08-007: (Electrical Parts)Document49 pagesNumber: SJG 08-007: (Electrical Parts)Tadeo Benegusenga50% (6)
- 85-LIFTB-IN V3.02 Optidrive Elevator BrochureDocument4 pages85-LIFTB-IN V3.02 Optidrive Elevator BrochurekoustasdNo ratings yet
- Delta CNC Controller For Turning Milling Boring MachinesDocument8 pagesDelta CNC Controller For Turning Milling Boring MachinesKAIDEARNo ratings yet
- Sieps80000046j 15 0Document378 pagesSieps80000046j 15 0Ulrich angel Fodouop kamdemNo ratings yet
- Transmission Control Module (TCM) : Wheel Speed Sensors Engine Speed & Transmission Input SpeedDocument3 pagesTransmission Control Module (TCM) : Wheel Speed Sensors Engine Speed & Transmission Input SpeedChris Chris100% (1)
- Ep80 enDocument7 pagesEp80 eneki miftakhul firdausNo ratings yet
- E700 CatalogDocument77 pagesE700 CatalogAnonymous T0KltPNo ratings yet
- Yaskawa Ac Drive f7Document98 pagesYaskawa Ac Drive f7Wieliam YeoNo ratings yet
- Ut35a DDocument9 pagesUt35a DEsen HawerNo ratings yet
- Electronic Motor Protection Relays - G - EMPR-DMPRDocument44 pagesElectronic Motor Protection Relays - G - EMPR-DMPRTruong HungNo ratings yet
- Woodward Pga Governor PDFDocument4 pagesWoodward Pga Governor PDFdwight ferrer100% (1)
- Fr200D Series: S SP Pe Ecciia All P Pu Urrp Po Osse E Iin Nvve Errtte Err Ffo Orr E Elle Evva Atto OrrDocument4 pagesFr200D Series: S SP Pe Ecciia All P Pu Urrp Po Osse E Iin Nvve Errtte Err Ffo Orr E Elle Evva Atto OrrRICHARDNo ratings yet
- E1005 SpecDocument4 pagesE1005 SpecMakombe RonnyNo ratings yet
- Datasheet Timer TE-8812UDocument2 pagesDatasheet Timer TE-8812UMarthaNo ratings yet
- Tosvert VF-nC3 Parameter List: - Setting InformationDocument6 pagesTosvert VF-nC3 Parameter List: - Setting InformationRiezky Emunc FaizalNo ratings yet
- Tapscan DRM Dynamic Resistance Measurement For Assessing Tap ChangersDocument4 pagesTapscan DRM Dynamic Resistance Measurement For Assessing Tap ChangerstommyNo ratings yet
- Manual Do Usuario L?-V-SD SeriesDocument340 pagesManual Do Usuario L?-V-SD SeriesEdimilson RodriguesNo ratings yet
- Yaskawa Manuals 4200Document435 pagesYaskawa Manuals 4200lopezsanchezjoseadrian7No ratings yet
- Pen00688 00Document2 pagesPen00688 00dylan.lebelNo ratings yet
- Operation Manual CTI EnglishDocument8 pagesOperation Manual CTI Englishandy habibiNo ratings yet
- Cat TM82 8300manual PDFDocument2 pagesCat TM82 8300manual PDFbuddhika MadusankaNo ratings yet
- RextonDocument9 pagesRextonSuperCajacNo ratings yet
- DX270 Blockdiagram 2010 04Document1 pageDX270 Blockdiagram 2010 04Khiareddine KadhemNo ratings yet
- Resistance Meter: Operation GuideDocument2 pagesResistance Meter: Operation GuideEko SutjiptoNo ratings yet
- MT DatasheetDocument6 pagesMT Datasheetdiyanorm2020No ratings yet
- Bundle Adjustment: Optimizing Visual Data for Precise ReconstructionFrom EverandBundle Adjustment: Optimizing Visual Data for Precise ReconstructionNo ratings yet
- Analog Dialogue, Volume 48, Number 1: Analog Dialogue, #13From EverandAnalog Dialogue, Volume 48, Number 1: Analog Dialogue, #13Rating: 4 out of 5 stars4/5 (1)
- Design NSC Radar Family Overview: Single SystemDocument8 pagesDesign NSC Radar Family Overview: Single Systemajc2_1984No ratings yet
- Rutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFDocument11 pagesRutter VDR-100 G2 - G3 Diagnostic Checklist - Rev 8.0 PDFajc2_1984100% (1)
- Rutter Technical Bulletin - NMEA Module UpdateDocument4 pagesRutter Technical Bulletin - NMEA Module Updateajc2_1984No ratings yet
- TL-R470T V4 UgDocument124 pagesTL-R470T V4 UgfalgunipatraNo ratings yet
- w4700gb0 c0315 PDFDocument148 pagesw4700gb0 c0315 PDFajc2_1984No ratings yet
- PIC16F87X - PIC16F88X MigrationDocument10 pagesPIC16F87X - PIC16F88X Migrationajc2_1984No ratings yet
- PragmaticsDocument10 pagesPragmaticsDisya RusmadinantiNo ratings yet
- Diff AmpDocument54 pagesDiff AmpUday GulghaneNo ratings yet
- Lesson-2-Climate IiDocument30 pagesLesson-2-Climate IiErica NatividadNo ratings yet
- Family Profile: HusbandDocument6 pagesFamily Profile: HusbandFau Fau DheoboNo ratings yet
- Bài Viết Nhóm 4: Report on cross-cultural project teamsDocument2 pagesBài Viết Nhóm 4: Report on cross-cultural project teamsLinhNo ratings yet
- 11thsamplebooklet PDFDocument200 pages11thsamplebooklet PDFSoumyodeep ChowdhuryNo ratings yet
- MRD Carotid StentDocument5 pagesMRD Carotid StentKhushboo WarhadeNo ratings yet
- Digital Business Strategy:: Harnessing Our Digital FutureDocument9 pagesDigital Business Strategy:: Harnessing Our Digital FutureAndyBarredaMoscosoNo ratings yet
- Summary of Maximum Load and Energy Consumption of Kwara State Goevrnment Mdas in Ilorin MetropolisDocument61 pagesSummary of Maximum Load and Energy Consumption of Kwara State Goevrnment Mdas in Ilorin MetropolisAbdulyekini AhmaduNo ratings yet
- How To Calculate Quantity of Bricks in WallDocument5 pagesHow To Calculate Quantity of Bricks in Wallواثق كريم نعيمNo ratings yet
- Nail Care Lesson 2Document5 pagesNail Care Lesson 2Tin TinNo ratings yet
- Construct The Relational Model of The Following Scenario. (6 MARKS) System DescriptionDocument2 pagesConstruct The Relational Model of The Following Scenario. (6 MARKS) System DescriptionBushra ShahzadNo ratings yet
- Chapter Add On 1Document18 pagesChapter Add On 1Escada BebeyNo ratings yet
- Heat Exchanger Design CHE 311 Final Project MSUDocument15 pagesHeat Exchanger Design CHE 311 Final Project MSUnefoussiNo ratings yet
- 2023 AWS Partner Funding Benefits Program Guide - EnglishDocument35 pages2023 AWS Partner Funding Benefits Program Guide - EnglishVictor Villacorta ElliottNo ratings yet
- A Master Forms Residential IndexDocument70 pagesA Master Forms Residential IndexAlberta Real EstateNo ratings yet
- American School: International LagosDocument32 pagesAmerican School: International LagosGozie obiNo ratings yet
- Eval Manual V5.1Document14 pagesEval Manual V5.1M Ahmed LatifNo ratings yet
- Split Up Syllabus Class Xii Physics 22-23Document1 pageSplit Up Syllabus Class Xii Physics 22-23ROHIT SIHRANo ratings yet
- Credit Note MH2202104 AA28787Document1 pageCredit Note MH2202104 AA28787Martin NadarNo ratings yet
- Rapidraw Honey AnalysisDocument5 pagesRapidraw Honey AnalysistaufiqridzNo ratings yet
- The Role of IRCTC Train Booking AgentsDocument7 pagesThe Role of IRCTC Train Booking AgentsRahul officalNo ratings yet
- NSTP Lesson 1Document4 pagesNSTP Lesson 1LACANARIA, ELLE BEA N.No ratings yet
- Kavity StadiumDocument21 pagesKavity StadiumD.V.Srinivasa RaoNo ratings yet
- Properties of MaterialsDocument7 pagesProperties of MaterialsPunchGirl ChannelNo ratings yet
- Arsenio T. Mendiola V. CaDocument7 pagesArsenio T. Mendiola V. CaCharisa BelistaNo ratings yet