Download as pdf or txt
You might also like
- Man NR20Document68 pagesMan NR20DP75% (8)
- Zero-Waste Agriculture - Organic Berry FarmDocument58 pagesZero-Waste Agriculture - Organic Berry FarmGiaToula54No ratings yet
- CWZD-600C+CS Manual BookDocument73 pagesCWZD-600C+CS Manual BookSharon ChNo ratings yet
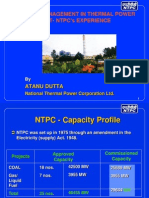
- Project Management in Thermal Power Plant-Ntpc'S ExperienceDocument54 pagesProject Management in Thermal Power Plant-Ntpc'S ExperienceSam100% (2)
- 3.1 Coagulation Process Control in Water Treatment Plants Using Multiple Model Predictive ControlDocument10 pages3.1 Coagulation Process Control in Water Treatment Plants Using Multiple Model Predictive ControlDiseñarq AyacuchoNo ratings yet
- Optimal Operation of Reservoirs For Downstream Water Quality Control Using Linked Simulation OptimizationDocument12 pagesOptimal Operation of Reservoirs For Downstream Water Quality Control Using Linked Simulation OptimizationAnirban DharNo ratings yet
- Model Predective ControlDocument10 pagesModel Predective ControlAmir SamaiNo ratings yet
- Anti-Disturbance Composite Tracking Control For A Coupled Two-Tank MIMO Process With Experimental StudiesDocument14 pagesAnti-Disturbance Composite Tracking Control For A Coupled Two-Tank MIMO Process With Experimental StudiesKha BùiNo ratings yet
- Multivariable Control of A Pulsed Liquid-Liquid Extraction Column by Neural NetworksDocument9 pagesMultivariable Control of A Pulsed Liquid-Liquid Extraction Column by Neural NetworksArunNo ratings yet
- Hvala2001 PDFDocument8 pagesHvala2001 PDFali ahmadiNo ratings yet
- Dynamic Modeling of A Simple Reverse Osmosis Desalination Plant For Advanced Control PurposesDocument6 pagesDynamic Modeling of A Simple Reverse Osmosis Desalination Plant For Advanced Control PurposesbazediNo ratings yet
- 07 Chapter 2Document23 pages07 Chapter 2Anonymous 2vaaNbDvNo ratings yet
- Dynamic Model Reduction For Two-Stage Anaerobic Digestion ProcessesDocument15 pagesDynamic Model Reduction For Two-Stage Anaerobic Digestion ProcessesKentner Chavez CorreaNo ratings yet
- Journal of Process Control: Paisan Kittisupakorn, Piyanuch Thitiyasook, M.A. Hussain, Wachira DaosudDocument12 pagesJournal of Process Control: Paisan Kittisupakorn, Piyanuch Thitiyasook, M.A. Hussain, Wachira DaosudJackyNo ratings yet
- Integrating Robustness, Optimality Andconstraints in Control of Nonlinear ProcessesDocument28 pagesIntegrating Robustness, Optimality Andconstraints in Control of Nonlinear ProcessesSolada NaksiriNo ratings yet
- Bardossy 2003Document16 pagesBardossy 2003fbrito111No ratings yet
- Wang 2009Document18 pagesWang 2009Jasmin JyalitaNo ratings yet
- Inputoutput Linearization Control Technique For AnDocument6 pagesInputoutput Linearization Control Technique For AnAlvaro HueteNo ratings yet
- Experimental Validation of A Nonlinear Back Stepping Liquid LevelDocument4 pagesExperimental Validation of A Nonlinear Back Stepping Liquid LevelMeenakshi MaitraNo ratings yet
- Desalination and Water TreatmentDocument10 pagesDesalination and Water TreatmentAbdou LazregNo ratings yet
- Dynamics of Processes With Recycle: Multifeed Ternary SystemsDocument14 pagesDynamics of Processes With Recycle: Multifeed Ternary SystemsJuan Carlos Cuellar EspinosaNo ratings yet
- Flotación No Convencional FinosDocument14 pagesFlotación No Convencional Finosalexander beltranNo ratings yet
- Plantwide Control Study of A Vinyl Acetate Monomer Process DesignDocument16 pagesPlantwide Control Study of A Vinyl Acetate Monomer Process DesignudayNo ratings yet
- Environmental Modelling & Software: Yaoling Bai, Thorsten Wagener, Patrick ReedDocument16 pagesEnvironmental Modelling & Software: Yaoling Bai, Thorsten Wagener, Patrick ReedAndrea GarciaNo ratings yet
- Optimización Multiobjetivo (NSGA-II)Document10 pagesOptimización Multiobjetivo (NSGA-II)Castillo RobertoNo ratings yet
- Computers and Chemical Engineering: Jong Woo Kim, Byung Jun Park, Tae Hoon Oh, Jong Min LeeDocument12 pagesComputers and Chemical Engineering: Jong Woo Kim, Byung Jun Park, Tae Hoon Oh, Jong Min LeeAhmed AKBASNo ratings yet
- Multivariable PID Control of An Activated Sludge Wastewater Treatment ProcessDocument25 pagesMultivariable PID Control of An Activated Sludge Wastewater Treatment ProcessmahderNo ratings yet
- An Adaptive System For Process Control Using Genetic AlgorithmsDocument6 pagesAn Adaptive System For Process Control Using Genetic AlgorithmshmaymadNo ratings yet
- COMBINING ON LINE PROCESS MEASUREMENTS AND MODELS TO EMPIRI - 2007 - IFAC ProceeDocument6 pagesCOMBINING ON LINE PROCESS MEASUREMENTS AND MODELS TO EMPIRI - 2007 - IFAC ProceesmeykelNo ratings yet
- Modeling and Monitoring of Treated Wastewater Based On Water Quality Assurance ParametersDocument10 pagesModeling and Monitoring of Treated Wastewater Based On Water Quality Assurance ParametersOussama amasouNo ratings yet
- JFS Carini Pralits Luchini 2015Document11 pagesJFS Carini Pralits Luchini 2015BO JINNo ratings yet
- Chapter 4. Input Load Determination and Ecosystem ModellingDocument12 pagesChapter 4. Input Load Determination and Ecosystem ModellingFlorentina SuduNo ratings yet
- Sustainability 14 15598Document35 pagesSustainability 14 15598Simón OsésNo ratings yet
- Control Charts For The Toxicity of Finished Water-Modeling The Structure of ToxicityDocument11 pagesControl Charts For The Toxicity of Finished Water-Modeling The Structure of ToxicitynihalNo ratings yet
- Removing Dissolved Organic Contaminants From Water: Second of A Sir-Part Series Water Treatment ProcessesDocument10 pagesRemoving Dissolved Organic Contaminants From Water: Second of A Sir-Part Series Water Treatment Processeslm2109306No ratings yet
- Assessing of Variable Speed Pumps in Water DistribDocument11 pagesAssessing of Variable Speed Pumps in Water DistribMuhammad FarhanNo ratings yet
- Adaptive Control System For Biogas Power Plant Using Model Predictive ControlDocument14 pagesAdaptive Control System For Biogas Power Plant Using Model Predictive ControlMohammedSaeedNo ratings yet
- GWL Prediction PaperDocument17 pagesGWL Prediction PaperLALIT CHOUDHARYNo ratings yet
- Auto Tuning PID Controller Based On Improved Genetic Algorithm For Reverse Osmosis PlantDocument6 pagesAuto Tuning PID Controller Based On Improved Genetic Algorithm For Reverse Osmosis PlantDragon_MoonNo ratings yet
- Modeling of Submerged Membrane Filtration Processes Using Recurrent Artificial Neural NetworksDocument9 pagesModeling of Submerged Membrane Filtration Processes Using Recurrent Artificial Neural NetworksIAES IJAINo ratings yet
- Measurement: Ankush Chakrabarty, Suvadeep Banerjee, Sayan Maity, Amitava ChatterjeeDocument14 pagesMeasurement: Ankush Chakrabarty, Suvadeep Banerjee, Sayan Maity, Amitava ChatterjeeKhuleedShaikhNo ratings yet
- A New Tool For Automatic Calibration of Storm Water Management ModelDocument9 pagesA New Tool For Automatic Calibration of Storm Water Management Model吳彥摩 WU,YEN-MO N86114059No ratings yet
- IEEE-Design and Simulation of Anaerobic Digestion System For Biogas ProductionDocument10 pagesIEEE-Design and Simulation of Anaerobic Digestion System For Biogas ProductionMichelle AyapNo ratings yet
- Multi Objective Cascade Controller For An Anaerobic DigesterDocument10 pagesMulti Objective Cascade Controller For An Anaerobic DigesterAnonymous MVHQ97KEoPNo ratings yet
- Dynamical Model Development and Parameter Identification For An Anaerobic Wastewater Treatment ProcessDocument15 pagesDynamical Model Development and Parameter Identification For An Anaerobic Wastewater Treatment Processaldemar reyes alvisNo ratings yet
- Paper 2 Annexure 2 PDFDocument7 pagesPaper 2 Annexure 2 PDFrajaNo ratings yet
- Demand Forecasting For Water Distribution Systems - 2014 - Procedia EngineeringDocument4 pagesDemand Forecasting For Water Distribution Systems - 2014 - Procedia EngineeringMohamed FirthousNo ratings yet
- Multivariable PID Control Design For Activated Sludge Process With Nitrification and DenitrificationDocument10 pagesMultivariable PID Control Design For Activated Sludge Process With Nitrification and DenitrificationLê Quốc ViệtNo ratings yet
- SPE-12591-System Survey For Improving Injection EfficiencyDocument6 pagesSPE-12591-System Survey For Improving Injection Efficiencyk.leya424No ratings yet
- Leakage Reduction in Water Distribution System Using Efficient Pressure Management Techniques. Case Study Nagpur, IndiaDocument12 pagesLeakage Reduction in Water Distribution System Using Efficient Pressure Management Techniques. Case Study Nagpur, Indiakumarharsh1532No ratings yet
- Journal of Hydrology: Research PapersDocument17 pagesJournal of Hydrology: Research PapersMusic ListenerNo ratings yet
- A Dynamical Systems Approach To The Control of Chaotic Dynamics in A Spatiotemporal Jet OwDocument13 pagesA Dynamical Systems Approach To The Control of Chaotic Dynamics in A Spatiotemporal Jet OwDe Nicolas JaidarNo ratings yet
- Control System Design For A Single Feed ETBE Reactive Distillation ColumnDocument18 pagesControl System Design For A Single Feed ETBE Reactive Distillation ColumnShafira AnanditaNo ratings yet
- Dynamic Process Intensification: Michael Baldea and Thomas F EdgarDocument6 pagesDynamic Process Intensification: Michael Baldea and Thomas F EdgarJulian BetancurNo ratings yet
- Hierarchical Dissolved Oxygen Control For Activated Sludge ProcessesDocument18 pagesHierarchical Dissolved Oxygen Control For Activated Sludge ProcessesAbderrahman MahiddiniNo ratings yet
- 44 StollerDocument6 pages44 StollersunliasNo ratings yet
- Pressure-Dependent Leak Detection Model and Its Application To A District Water SystemDocument13 pagesPressure-Dependent Leak Detection Model and Its Application To A District Water SystemManjul KothariNo ratings yet
- SPE 18565 PA - RelPermOvrvw PDFDocument5 pagesSPE 18565 PA - RelPermOvrvw PDFDavid OtálvaroNo ratings yet
- SJ Bury - wst.2002.0623Document10 pagesSJ Bury - wst.2002.0623liemchunhanNo ratings yet
- 2004 Sampson PIDDocument11 pages2004 Sampson PIDCumhur ÖzbaşNo ratings yet
- J Apm 2011 02 015 PDFDocument12 pagesJ Apm 2011 02 015 PDFm.shoaibNo ratings yet
- Diagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceFrom EverandDiagnosis and Robust Control of Complex Building Central Chilling Systems for Enhanced Energy PerformanceNo ratings yet
- Modern Anti-windup Synthesis: Control Augmentation for Actuator SaturationFrom EverandModern Anti-windup Synthesis: Control Augmentation for Actuator SaturationRating: 5 out of 5 stars5/5 (1)
- GU Job Academic 9Document2 pagesGU Job Academic 9Fadl EssaNo ratings yet
- A Comparative Study of RO and MSF Desalination PlantsDocument8 pagesA Comparative Study of RO and MSF Desalination PlantsFadl EssaNo ratings yet
- Performance Evaluation of Two RO Membrane Configurations in A MSF/RO Hybrid SystemDocument15 pagesPerformance Evaluation of Two RO Membrane Configurations in A MSF/RO Hybrid SystemFadl EssaNo ratings yet
- Optimal Design of A Hybrid RO/MSF Desalination System in A non-OPEC CountryDocument14 pagesOptimal Design of A Hybrid RO/MSF Desalination System in A non-OPEC CountryFadl EssaNo ratings yet
- Optimal Design of Hybrid RO/MSF Desalination Plants Part III: Sensitivity AnalysisDocument18 pagesOptimal Design of Hybrid RO/MSF Desalination Plants Part III: Sensitivity AnalysisFadl EssaNo ratings yet
- Coupling of A Nuclear Reactor To Hybrid RO-MSF Desalination PlantsDocument10 pagesCoupling of A Nuclear Reactor To Hybrid RO-MSF Desalination PlantsFadl EssaNo ratings yet
- High Rise Building FiresDocument29 pagesHigh Rise Building Firesghada gattouchNo ratings yet
- Top End Overhaul Parts List.Document3 pagesTop End Overhaul Parts List.Shabbir AhmedNo ratings yet
- 4 5902085539233794318Document366 pages4 5902085539233794318Angel Jesús Agapito Cortez100% (6)
- Komatsu Wheel Loader PDFDocument7 pagesKomatsu Wheel Loader PDFDavis SanchezNo ratings yet
- HW6 201Document4 pagesHW6 201Y7ya73No ratings yet
- Mcmurry PDFDocument119 pagesMcmurry PDFRicardo SierraNo ratings yet
- LS Cable: Offshore & MarineDocument4 pagesLS Cable: Offshore & MarinetranminhtrunglsvinaNo ratings yet
- 1753 Duplex Piston Pump Mud PumpDocument2 pages1753 Duplex Piston Pump Mud PumpDeddy IrawanNo ratings yet
- Power Quality DisturbancesDocument24 pagesPower Quality DisturbancesSunil SinghNo ratings yet
- mtv1000 UsermanDocument95 pagesmtv1000 UsermanJuan Carlos Quispe LopezNo ratings yet
- Certif 2012 GermanisherDocument7 pagesCertif 2012 GermanisherAnaApcarianNo ratings yet
- MethanolDocument37 pagesMethanolanimesh jhaNo ratings yet
- Quality You Expect: Advantages at A GlanceDocument2 pagesQuality You Expect: Advantages at A GlanceNooruddin DeroNo ratings yet
- KIL3012 - WEEK 1 - 10.9.19 (Student Copy)Document61 pagesKIL3012 - WEEK 1 - 10.9.19 (Student Copy)Ed100% (1)
- Chapter 1 - Introduction - 2016 - Applied Welding EngineeringDocument3 pagesChapter 1 - Introduction - 2016 - Applied Welding EngineeringJhair Jhamidh Aquino PortocarreroNo ratings yet
- Combustion Chambers in CI EnginesDocument24 pagesCombustion Chambers in CI EnginesKLUniveristy100% (2)
- 01zus-D N MDocument7 pages01zus-D N MGITANOSOFT GARCIANo ratings yet
- Relay Protection Setting For Preparing ReportDocument12 pagesRelay Protection Setting For Preparing ReportRajeev ValunjkarNo ratings yet
- 02 - 2 WaDocument17 pages02 - 2 WaJoshua MenesesNo ratings yet
- Chapter 11Document53 pagesChapter 11NathanNo ratings yet
- 022482-3213B Trimble LOADRITE C-Series Belt Scales Brochure 02 16 WEB1Document8 pages022482-3213B Trimble LOADRITE C-Series Belt Scales Brochure 02 16 WEB1Giap Ngoc LeNo ratings yet
- 2007-6031-2J-0007 Rev H Re-AFD Pipeline Hydraulic Analysis - ApprovedDocument166 pages2007-6031-2J-0007 Rev H Re-AFD Pipeline Hydraulic Analysis - ApprovedManh Tien HoangNo ratings yet
- B-Protech John CraneDocument6 pagesB-Protech John CranePatricia J ÁngelesNo ratings yet
- BD418 External - Annunciator - BTTY ANN 003 FiplexDocument1 pageBD418 External - Annunciator - BTTY ANN 003 Fiplexculeros1No ratings yet
- Grand Selection 2021Document60 pagesGrand Selection 2021Nesa XxxNo ratings yet