
Electronics: A Non-Contact Integrated Body-Ambient Temperature Sensors Platform To Contrast COVID-19
Electronics: A Non-Contact Integrated Body-Ambient Temperature Sensors Platform To Contrast COVID-19
You might also like
- Sensors: Design and Development of A Low Cost, Non-Contact Infrared Thermometer With Range CompensationDocument12 pagesSensors: Design and Development of A Low Cost, Non-Contact Infrared Thermometer With Range CompensationAnna HansenNo ratings yet
- Angel Door Control SideDocument16 pagesAngel Door Control SideAngel GabrielNo ratings yet
- Sensors: Enabling Smart Air Conditioning by Sensor Development: A ReviewDocument24 pagesSensors: Enabling Smart Air Conditioning by Sensor Development: A ReviewBrent De MesaNo ratings yet
- Buildings 07 00010 PDFDocument11 pagesBuildings 07 00010 PDFpicnarukNo ratings yet
- Non-Contact Temperature Reader With Sanitizer Dispenser (NCTRSD)Document11 pagesNon-Contact Temperature Reader With Sanitizer Dispenser (NCTRSD)dannyNo ratings yet
- Humididty and Temperatur MonitoringDocument4 pagesHumididty and Temperatur Monitoringfaqih devNo ratings yet
- Practical Research Final OutputDocument24 pagesPractical Research Final OutputJanjan BonaNo ratings yet
- A Temperature Monitoring System Incorporating An Array of Precision Wireless ThermometersDocument12 pagesA Temperature Monitoring System Incorporating An Array of Precision Wireless Thermometersomoruyi osazeNo ratings yet
- A Real-Time Analytic Face ThermalDocument7 pagesA Real-Time Analytic Face ThermalbiswaNo ratings yet
- IoT Based Automated Entry System For CovidDocument10 pagesIoT Based Automated Entry System For CovidIJRASETPublicationsNo ratings yet
- Air Pollution Monitoring SystemDocument5 pagesAir Pollution Monitoring SystemEditor IJTSRDNo ratings yet
- Related Literature: Cameras-Can-Help-Prevent-The-Spread-Of-Covid-19 PDFDocument3 pagesRelated Literature: Cameras-Can-Help-Prevent-The-Spread-Of-Covid-19 PDFRyan DagsilNo ratings yet
- Air Pollution and Temperature Humidity Monitring SystemDocument30 pagesAir Pollution and Temperature Humidity Monitring SystemSneha SharmaNo ratings yet
- Sensors 18 03445 PDFDocument23 pagesSensors 18 03445 PDFadfasfdafssafNo ratings yet
- MaisaraDocument17 pagesMaisaraaagaladima324No ratings yet
- Implementation of Weather Monitoring System: International Journal of Pure and Applied Mathematics No. 16 2018, 477-493Document18 pagesImplementation of Weather Monitoring System: International Journal of Pure and Applied Mathematics No. 16 2018, 477-493HITESH PONNOJUNo ratings yet
- Sistem Pengukuran Suhu Tubuh Otomatis Berbasis Arduino Sebagai Alat Deteksi Awal COVID-19Document5 pagesSistem Pengukuran Suhu Tubuh Otomatis Berbasis Arduino Sebagai Alat Deteksi Awal COVID-19Nanda Dira UtamaNo ratings yet
- Azhari 2022 J. Phys. Conf. Ser. 2193 012014Document11 pagesAzhari 2022 J. Phys. Conf. Ser. 2193 012014AzhariNo ratings yet
- 244-Article Text-940-1-10-20220731Document10 pages244-Article Text-940-1-10-20220731norlanjameslaureano14No ratings yet
- Medina Santiago2019Document13 pagesMedina Santiago2019Hafshah DeviNo ratings yet
- IoT-based Data Logger For Weather Monitoring Using Arduino-Based Wireless Sensor Networks With Remote Graphical Application and AlertsDocument8 pagesIoT-based Data Logger For Weather Monitoring Using Arduino-Based Wireless Sensor Networks With Remote Graphical Application and AlertsKrishna Prasad SatamrajuNo ratings yet
- Noncontact-Body-Temperature-Measurement: Poster SessionDocument10 pagesNoncontact-Body-Temperature-Measurement: Poster SessionThanh Tin DangNo ratings yet
- Global Transitions Proceedings: B Varshini, HR Yogesh, Syed Danish Pasha, Maaz Suhail, V Madhumitha, Archana SasiDocument9 pagesGlobal Transitions Proceedings: B Varshini, HR Yogesh, Syed Danish Pasha, Maaz Suhail, V Madhumitha, Archana SasiNALLAMSETTY SRI RAMYANo ratings yet
- Human Detection Using ThermopilesDocument7 pagesHuman Detection Using ThermopilesammukartiNo ratings yet
- Development of A GSM-Based Smoke Detector and Temperature Monitoring System For Preventing Fire OutbreakDocument5 pagesDevelopment of A GSM-Based Smoke Detector and Temperature Monitoring System For Preventing Fire OutbreakInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Presentation For Weather Monitoring by DharmendraDocument12 pagesPresentation For Weather Monitoring by DharmendraDharmendra SinghNo ratings yet
- Design and Implementation of Aurdino Based Air Quality Measurement Meter With Digital Dashboard On Smartphone Using Blynk PDFDocument6 pagesDesign and Implementation of Aurdino Based Air Quality Measurement Meter With Digital Dashboard On Smartphone Using Blynk PDFKuldeep kushwahaNo ratings yet
- (REVISED) Air Quality Monitoring SystemDocument2 pages(REVISED) Air Quality Monitoring SystemTsalachNo ratings yet
- Digital Thermometer Project - BadryaDocument13 pagesDigital Thermometer Project - BadryaMohammed Abdalla AliNo ratings yet
- Monitoring System For Temperature and Humidity Measurement With DHT11 Sensor Using NodeMCUDocument6 pagesMonitoring System For Temperature and Humidity Measurement With DHT11 Sensor Using NodeMCUInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmDocument8 pagesAutomatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmAli Adnan100% (1)
- Microcontroller Based Real Time Weather Monitoring Device With GSMDocument5 pagesMicrocontroller Based Real Time Weather Monitoring Device With GSMshankiyaNo ratings yet
- Research PlanDocument17 pagesResearch PlanBeverly CepedaNo ratings yet
- Sensors: Thermalwrist: Smartphone Thermal Camera Correction Using A Wristband SensorDocument18 pagesSensors: Thermalwrist: Smartphone Thermal Camera Correction Using A Wristband SensorShaurya ChandraNo ratings yet
- IOT Weather Monitoring System SynopsisDocument5 pagesIOT Weather Monitoring System SynopsisAshitNo ratings yet
- Humidity and Temperature Monitoring: January 2018Document5 pagesHumidity and Temperature Monitoring: January 2018Musa AbdulrasheedNo ratings yet
- An Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringDocument8 pagesAn Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringArga HantaraNo ratings yet
- 283-Article Text-932-1061-10-20211227Document8 pages283-Article Text-932-1061-10-20211227Dami IonelaNo ratings yet
- Temperature and Face Mask Detection With Contactless Sanitizer DispenserDocument6 pagesTemperature and Face Mask Detection With Contactless Sanitizer DispenserIJRASETPublicationsNo ratings yet
- Automatic Gate For Body Temperature Check and Masks Wearing Compliance Using An Embedded System and Deep LearningDocument10 pagesAutomatic Gate For Body Temperature Check and Masks Wearing Compliance Using An Embedded System and Deep LearningLahul LahiriNo ratings yet
- Sensors 21 08466Document20 pagesSensors 21 08466cooldudepNo ratings yet
- System For Remote Monitoring and Control of Baby Incubator and Warmer PDFDocument7 pagesSystem For Remote Monitoring and Control of Baby Incubator and Warmer PDFMaimunah Novita SariNo ratings yet
- Comparative Analysis of Water and Oil Media On Temperature Stability in PID Control-Based Digital Thermometer CalibratorDocument6 pagesComparative Analysis of Water and Oil Media On Temperature Stability in PID Control-Based Digital Thermometer CalibratorAyu NissaNo ratings yet
- Applsci 10 08912 v2Document17 pagesApplsci 10 08912 v2rajeshNo ratings yet
- Embedded System For Short-Term Weather ForecastingDocument6 pagesEmbedded System For Short-Term Weather ForecastingPrakash DattNo ratings yet
- Main sFAfaoMgWkDocument12 pagesMain sFAfaoMgWkaatishberde98No ratings yet
- Design of A Non-Contact Body Temperature Measurement System For Smart CampusDocument4 pagesDesign of A Non-Contact Body Temperature Measurement System For Smart CampusTerves AlexanderNo ratings yet
- Proposal CBMDocument5 pagesProposal CBMVlarick JongNo ratings yet
- Iot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMDocument6 pagesIot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMPidikiti Surendra BabuNo ratings yet
- Kusuma 2020 J. Phys. Conf. Ser. 1501 012004Document11 pagesKusuma 2020 J. Phys. Conf. Ser. 1501 012004JosseNo ratings yet
- A Multi-Channel Temperature and Humidity Measurement System Based On A Micro-ControllerDocument5 pagesA Multi-Channel Temperature and Humidity Measurement System Based On A Micro-ControllerNadir Soner KaplanNo ratings yet
- Department of Computer Science & EngineeringDocument10 pagesDepartment of Computer Science & EngineeringC191235 Sadia IslamNo ratings yet
- Applsci 13 11294Document33 pagesApplsci 13 11294aislynpythonNo ratings yet
- IRJET V5I12167 With Cover Page v2Document4 pagesIRJET V5I12167 With Cover Page v2TaufiqurrahmanNo ratings yet
- Forehead, Temple and Wrist Temperature Assessmente of Ethnic Groups Using Infrared TechnologyDocument9 pagesForehead, Temple and Wrist Temperature Assessmente of Ethnic Groups Using Infrared TechnologyYira Tatiana Castro RomeroNo ratings yet
- The Comparing of The Selected Temperature Sensors Compatible With The Arduino PlatformDocument4 pagesThe Comparing of The Selected Temperature Sensors Compatible With The Arduino Platformabhe prasetyaNo ratings yet
- An Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringDocument8 pagesAn Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringAyu NissaNo ratings yet
- Measurement: Wen-Tsai Sung, Sung-Jung HsiaoDocument16 pagesMeasurement: Wen-Tsai Sung, Sung-Jung Hsiaoseyyed jamal mirjaliliNo ratings yet
- Optimizing HVAC Efficiency: A Thermal Mapping Analysis of Xavier University Engineering Faculty OfficeDocument28 pagesOptimizing HVAC Efficiency: A Thermal Mapping Analysis of Xavier University Engineering Faculty Office20200019069No ratings yet
- Analysis of The Motifs of Animation Film "Coco": Xuexin DuDocument5 pagesAnalysis of The Motifs of Animation Film "Coco": Xuexin DuMeryl QuinteroNo ratings yet
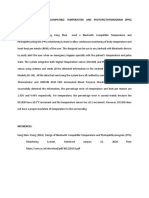
- Design of Bluetooth Compatible Temperature and Photoplethysmogram (PPG) Monitoring SystemDocument1 pageDesign of Bluetooth Compatible Temperature and Photoplethysmogram (PPG) Monitoring SystemMeryl QuinteroNo ratings yet
- Effects of Ambient Temperature and Relative HumidiDocument19 pagesEffects of Ambient Temperature and Relative HumidiMeryl QuinteroNo ratings yet
- Environment International: A A B B ADocument8 pagesEnvironment International: A A B B AMeryl QuinteroNo ratings yet
- Back To Basics On Risk Management - FuturesDocument2 pagesBack To Basics On Risk Management - FuturesMeryl QuinteroNo ratings yet
- Application of Aquatic Plants Bokashi On The Growth and YIELDS OF RED ONION (Allium Ascalonicum L.)Document7 pagesApplication of Aquatic Plants Bokashi On The Growth and YIELDS OF RED ONION (Allium Ascalonicum L.)Meryl QuinteroNo ratings yet
- Edrada2020 Article FirstCOVID-19InfectionsInThePhDocument7 pagesEdrada2020 Article FirstCOVID-19InfectionsInThePhMeryl QuinteroNo ratings yet
- Feasting On Microplastics: Ingestion by and Effects On Marine OrganismsDocument15 pagesFeasting On Microplastics: Ingestion by and Effects On Marine OrganismsMeryl QuinteroNo ratings yet
- DR - Vivek-CV (1) 1-2-5Document5 pagesDR - Vivek-CV (1) 1-2-5BRCMGroup BahalNo ratings yet
- Wp25ab Incubator User ManualDocument7 pagesWp25ab Incubator User Manualdonya alasmarNo ratings yet
- Exp04 - DC Circuit With Resistive LoadDocument13 pagesExp04 - DC Circuit With Resistive LoadBaam IkramNo ratings yet
- 7SR11 7SR12 - Argus Complete Technical ManualDocument297 pages7SR11 7SR12 - Argus Complete Technical Manualm khNo ratings yet
- SUSPENSION Front Air Suspension Control Module (ASCM) - Electrical Diagnostics - Ram Pickup PDFDocument236 pagesSUSPENSION Front Air Suspension Control Module (ASCM) - Electrical Diagnostics - Ram Pickup PDFcharles100% (1)
- VLT51 ProgrammingDocument77 pagesVLT51 ProgrammingAnonymous GbfoQcCNo ratings yet
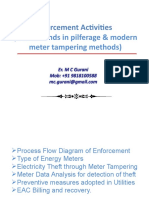
- Pilferage & Meter TamperDocument76 pagesPilferage & Meter TamperGautam ChattopadhyayNo ratings yet
- Catalogue Limit Switches XC Standard RangeDocument161 pagesCatalogue Limit Switches XC Standard RangeJOSE DANIEL PEREZNo ratings yet
- MANUAL 0015 - VENTILADOR TRILOGY Ver 4 PDFDocument414 pagesMANUAL 0015 - VENTILADOR TRILOGY Ver 4 PDFDiana Marcela CalambasNo ratings yet
- JCQ-8D Manual Instruction - 1Document9 pagesJCQ-8D Manual Instruction - 1MinhNo ratings yet
- 1986 Siliconix FET Databook PDFDocument374 pages1986 Siliconix FET Databook PDFbayman0% (1)
- Controlador de Temperatura OmronDocument2 pagesControlador de Temperatura OmronJhonatan BaezNo ratings yet
- Panasonic TC-50PS14 - GPF12DU ChassisDocument118 pagesPanasonic TC-50PS14 - GPF12DU ChassisburnacusNo ratings yet
- ECE Syllabus, ECE Department HSTUDocument46 pagesECE Syllabus, ECE Department HSTUIrfan NabilNo ratings yet
- Time Signal Receiver ModuleDocument4 pagesTime Signal Receiver ModuleBorsukNo ratings yet
- History of The TransistorDocument120 pagesHistory of The TransistorfirmanrusydiNo ratings yet
- Chapter 5-Transmission LinesDocument54 pagesChapter 5-Transmission LinesAnis NajihahNo ratings yet
- Ez CurveDocument3 pagesEz CurveGerar MuzNo ratings yet
- Adding A DC Loop Contactor To A Mentor MP: Application Example Using 24 VDC Control Logic (I.e. PLC Control)Document3 pagesAdding A DC Loop Contactor To A Mentor MP: Application Example Using 24 VDC Control Logic (I.e. PLC Control)Mr.K chNo ratings yet
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsDocument8 pagesGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjNo ratings yet
- Philips NorelcoDocument2 pagesPhilips Norelcosjaved786No ratings yet
- PDK 028932 Kekw Hardware enDocument228 pagesPDK 028932 Kekw Hardware enwilliam tolentinoNo ratings yet
- VF LRV Orion - 300 I 9010141 enDocument90 pagesVF LRV Orion - 300 I 9010141 enSam WildNo ratings yet
- 2324model Proposal Report 1Document21 pages2324model Proposal Report 1Han hoNo ratings yet
- Tda 1519Document20 pagesTda 1519ahmedNo ratings yet
- E3 Charger Manual-New PDFDocument2 pagesE3 Charger Manual-New PDFअभिजीत कुमारNo ratings yet
- Operators Manual For KDS: Manual Provides Installation, Operation, and Maintenance InstructionsDocument21 pagesOperators Manual For KDS: Manual Provides Installation, Operation, and Maintenance InstructionsRaul Jaime Flores GuardiaNo ratings yet
- M29F080DDocument37 pagesM29F080DHELVER GIOVANNI RODRIGUEZ VEGANo ratings yet





























































































Download as pdf or txt
You might also like
- Sensors: Design and Development of A Low Cost, Non-Contact Infrared Thermometer With Range CompensationDocument12 pagesSensors: Design and Development of A Low Cost, Non-Contact Infrared Thermometer With Range CompensationAnna HansenNo ratings yet
- Angel Door Control SideDocument16 pagesAngel Door Control SideAngel GabrielNo ratings yet
- Sensors: Enabling Smart Air Conditioning by Sensor Development: A ReviewDocument24 pagesSensors: Enabling Smart Air Conditioning by Sensor Development: A ReviewBrent De MesaNo ratings yet
- Buildings 07 00010 PDFDocument11 pagesBuildings 07 00010 PDFpicnarukNo ratings yet
- Non-Contact Temperature Reader With Sanitizer Dispenser (NCTRSD)Document11 pagesNon-Contact Temperature Reader With Sanitizer Dispenser (NCTRSD)dannyNo ratings yet
- Humididty and Temperatur MonitoringDocument4 pagesHumididty and Temperatur Monitoringfaqih devNo ratings yet
- Practical Research Final OutputDocument24 pagesPractical Research Final OutputJanjan BonaNo ratings yet
- A Temperature Monitoring System Incorporating An Array of Precision Wireless ThermometersDocument12 pagesA Temperature Monitoring System Incorporating An Array of Precision Wireless Thermometersomoruyi osazeNo ratings yet
- A Real-Time Analytic Face ThermalDocument7 pagesA Real-Time Analytic Face ThermalbiswaNo ratings yet
- IoT Based Automated Entry System For CovidDocument10 pagesIoT Based Automated Entry System For CovidIJRASETPublicationsNo ratings yet
- Air Pollution Monitoring SystemDocument5 pagesAir Pollution Monitoring SystemEditor IJTSRDNo ratings yet
- Related Literature: Cameras-Can-Help-Prevent-The-Spread-Of-Covid-19 PDFDocument3 pagesRelated Literature: Cameras-Can-Help-Prevent-The-Spread-Of-Covid-19 PDFRyan DagsilNo ratings yet
- Air Pollution and Temperature Humidity Monitring SystemDocument30 pagesAir Pollution and Temperature Humidity Monitring SystemSneha SharmaNo ratings yet
- Sensors 18 03445 PDFDocument23 pagesSensors 18 03445 PDFadfasfdafssafNo ratings yet
- MaisaraDocument17 pagesMaisaraaagaladima324No ratings yet
- Implementation of Weather Monitoring System: International Journal of Pure and Applied Mathematics No. 16 2018, 477-493Document18 pagesImplementation of Weather Monitoring System: International Journal of Pure and Applied Mathematics No. 16 2018, 477-493HITESH PONNOJUNo ratings yet
- Sistem Pengukuran Suhu Tubuh Otomatis Berbasis Arduino Sebagai Alat Deteksi Awal COVID-19Document5 pagesSistem Pengukuran Suhu Tubuh Otomatis Berbasis Arduino Sebagai Alat Deteksi Awal COVID-19Nanda Dira UtamaNo ratings yet
- Azhari 2022 J. Phys. Conf. Ser. 2193 012014Document11 pagesAzhari 2022 J. Phys. Conf. Ser. 2193 012014AzhariNo ratings yet
- 244-Article Text-940-1-10-20220731Document10 pages244-Article Text-940-1-10-20220731norlanjameslaureano14No ratings yet
- Medina Santiago2019Document13 pagesMedina Santiago2019Hafshah DeviNo ratings yet
- IoT-based Data Logger For Weather Monitoring Using Arduino-Based Wireless Sensor Networks With Remote Graphical Application and AlertsDocument8 pagesIoT-based Data Logger For Weather Monitoring Using Arduino-Based Wireless Sensor Networks With Remote Graphical Application and AlertsKrishna Prasad SatamrajuNo ratings yet
- Noncontact-Body-Temperature-Measurement: Poster SessionDocument10 pagesNoncontact-Body-Temperature-Measurement: Poster SessionThanh Tin DangNo ratings yet
- Global Transitions Proceedings: B Varshini, HR Yogesh, Syed Danish Pasha, Maaz Suhail, V Madhumitha, Archana SasiDocument9 pagesGlobal Transitions Proceedings: B Varshini, HR Yogesh, Syed Danish Pasha, Maaz Suhail, V Madhumitha, Archana SasiNALLAMSETTY SRI RAMYANo ratings yet
- Human Detection Using ThermopilesDocument7 pagesHuman Detection Using ThermopilesammukartiNo ratings yet
- Development of A GSM-Based Smoke Detector and Temperature Monitoring System For Preventing Fire OutbreakDocument5 pagesDevelopment of A GSM-Based Smoke Detector and Temperature Monitoring System For Preventing Fire OutbreakInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Presentation For Weather Monitoring by DharmendraDocument12 pagesPresentation For Weather Monitoring by DharmendraDharmendra SinghNo ratings yet
- Design and Implementation of Aurdino Based Air Quality Measurement Meter With Digital Dashboard On Smartphone Using Blynk PDFDocument6 pagesDesign and Implementation of Aurdino Based Air Quality Measurement Meter With Digital Dashboard On Smartphone Using Blynk PDFKuldeep kushwahaNo ratings yet
- (REVISED) Air Quality Monitoring SystemDocument2 pages(REVISED) Air Quality Monitoring SystemTsalachNo ratings yet
- Digital Thermometer Project - BadryaDocument13 pagesDigital Thermometer Project - BadryaMohammed Abdalla AliNo ratings yet
- Monitoring System For Temperature and Humidity Measurement With DHT11 Sensor Using NodeMCUDocument6 pagesMonitoring System For Temperature and Humidity Measurement With DHT11 Sensor Using NodeMCUInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Automatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmDocument8 pagesAutomatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmAli Adnan100% (1)
- Microcontroller Based Real Time Weather Monitoring Device With GSMDocument5 pagesMicrocontroller Based Real Time Weather Monitoring Device With GSMshankiyaNo ratings yet
- Research PlanDocument17 pagesResearch PlanBeverly CepedaNo ratings yet
- Sensors: Thermalwrist: Smartphone Thermal Camera Correction Using A Wristband SensorDocument18 pagesSensors: Thermalwrist: Smartphone Thermal Camera Correction Using A Wristband SensorShaurya ChandraNo ratings yet
- IOT Weather Monitoring System SynopsisDocument5 pagesIOT Weather Monitoring System SynopsisAshitNo ratings yet
- Humidity and Temperature Monitoring: January 2018Document5 pagesHumidity and Temperature Monitoring: January 2018Musa AbdulrasheedNo ratings yet
- An Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringDocument8 pagesAn Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringArga HantaraNo ratings yet
- 283-Article Text-932-1061-10-20211227Document8 pages283-Article Text-932-1061-10-20211227Dami IonelaNo ratings yet
- Temperature and Face Mask Detection With Contactless Sanitizer DispenserDocument6 pagesTemperature and Face Mask Detection With Contactless Sanitizer DispenserIJRASETPublicationsNo ratings yet
- Automatic Gate For Body Temperature Check and Masks Wearing Compliance Using An Embedded System and Deep LearningDocument10 pagesAutomatic Gate For Body Temperature Check and Masks Wearing Compliance Using An Embedded System and Deep LearningLahul LahiriNo ratings yet
- Sensors 21 08466Document20 pagesSensors 21 08466cooldudepNo ratings yet
- System For Remote Monitoring and Control of Baby Incubator and Warmer PDFDocument7 pagesSystem For Remote Monitoring and Control of Baby Incubator and Warmer PDFMaimunah Novita SariNo ratings yet
- Comparative Analysis of Water and Oil Media On Temperature Stability in PID Control-Based Digital Thermometer CalibratorDocument6 pagesComparative Analysis of Water and Oil Media On Temperature Stability in PID Control-Based Digital Thermometer CalibratorAyu NissaNo ratings yet
- Applsci 10 08912 v2Document17 pagesApplsci 10 08912 v2rajeshNo ratings yet
- Embedded System For Short-Term Weather ForecastingDocument6 pagesEmbedded System For Short-Term Weather ForecastingPrakash DattNo ratings yet
- Main sFAfaoMgWkDocument12 pagesMain sFAfaoMgWkaatishberde98No ratings yet
- Design of A Non-Contact Body Temperature Measurement System For Smart CampusDocument4 pagesDesign of A Non-Contact Body Temperature Measurement System For Smart CampusTerves AlexanderNo ratings yet
- Proposal CBMDocument5 pagesProposal CBMVlarick JongNo ratings yet
- Iot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMDocument6 pagesIot Based Vehicle Pollution Monitoring and Alerting System Using Thingspeak Server and GSMPidikiti Surendra BabuNo ratings yet
- Kusuma 2020 J. Phys. Conf. Ser. 1501 012004Document11 pagesKusuma 2020 J. Phys. Conf. Ser. 1501 012004JosseNo ratings yet
- A Multi-Channel Temperature and Humidity Measurement System Based On A Micro-ControllerDocument5 pagesA Multi-Channel Temperature and Humidity Measurement System Based On A Micro-ControllerNadir Soner KaplanNo ratings yet
- Department of Computer Science & EngineeringDocument10 pagesDepartment of Computer Science & EngineeringC191235 Sadia IslamNo ratings yet
- Applsci 13 11294Document33 pagesApplsci 13 11294aislynpythonNo ratings yet
- IRJET V5I12167 With Cover Page v2Document4 pagesIRJET V5I12167 With Cover Page v2TaufiqurrahmanNo ratings yet
- Forehead, Temple and Wrist Temperature Assessmente of Ethnic Groups Using Infrared TechnologyDocument9 pagesForehead, Temple and Wrist Temperature Assessmente of Ethnic Groups Using Infrared TechnologyYira Tatiana Castro RomeroNo ratings yet
- The Comparing of The Selected Temperature Sensors Compatible With The Arduino PlatformDocument4 pagesThe Comparing of The Selected Temperature Sensors Compatible With The Arduino Platformabhe prasetyaNo ratings yet
- An Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringDocument8 pagesAn Android INCU Analyzer Design To Calibrate Infant Incubator Using Bluetooth Communication For Real-Time and Wireless MonitoringAyu NissaNo ratings yet
- Measurement: Wen-Tsai Sung, Sung-Jung HsiaoDocument16 pagesMeasurement: Wen-Tsai Sung, Sung-Jung Hsiaoseyyed jamal mirjaliliNo ratings yet
- Optimizing HVAC Efficiency: A Thermal Mapping Analysis of Xavier University Engineering Faculty OfficeDocument28 pagesOptimizing HVAC Efficiency: A Thermal Mapping Analysis of Xavier University Engineering Faculty Office20200019069No ratings yet
- Analysis of The Motifs of Animation Film "Coco": Xuexin DuDocument5 pagesAnalysis of The Motifs of Animation Film "Coco": Xuexin DuMeryl QuinteroNo ratings yet
- Design of Bluetooth Compatible Temperature and Photoplethysmogram (PPG) Monitoring SystemDocument1 pageDesign of Bluetooth Compatible Temperature and Photoplethysmogram (PPG) Monitoring SystemMeryl QuinteroNo ratings yet
- Effects of Ambient Temperature and Relative HumidiDocument19 pagesEffects of Ambient Temperature and Relative HumidiMeryl QuinteroNo ratings yet
- Environment International: A A B B ADocument8 pagesEnvironment International: A A B B AMeryl QuinteroNo ratings yet
- Back To Basics On Risk Management - FuturesDocument2 pagesBack To Basics On Risk Management - FuturesMeryl QuinteroNo ratings yet
- Application of Aquatic Plants Bokashi On The Growth and YIELDS OF RED ONION (Allium Ascalonicum L.)Document7 pagesApplication of Aquatic Plants Bokashi On The Growth and YIELDS OF RED ONION (Allium Ascalonicum L.)Meryl QuinteroNo ratings yet
- Edrada2020 Article FirstCOVID-19InfectionsInThePhDocument7 pagesEdrada2020 Article FirstCOVID-19InfectionsInThePhMeryl QuinteroNo ratings yet
- Feasting On Microplastics: Ingestion by and Effects On Marine OrganismsDocument15 pagesFeasting On Microplastics: Ingestion by and Effects On Marine OrganismsMeryl QuinteroNo ratings yet
- DR - Vivek-CV (1) 1-2-5Document5 pagesDR - Vivek-CV (1) 1-2-5BRCMGroup BahalNo ratings yet
- Wp25ab Incubator User ManualDocument7 pagesWp25ab Incubator User Manualdonya alasmarNo ratings yet
- Exp04 - DC Circuit With Resistive LoadDocument13 pagesExp04 - DC Circuit With Resistive LoadBaam IkramNo ratings yet
- 7SR11 7SR12 - Argus Complete Technical ManualDocument297 pages7SR11 7SR12 - Argus Complete Technical Manualm khNo ratings yet
- SUSPENSION Front Air Suspension Control Module (ASCM) - Electrical Diagnostics - Ram Pickup PDFDocument236 pagesSUSPENSION Front Air Suspension Control Module (ASCM) - Electrical Diagnostics - Ram Pickup PDFcharles100% (1)
- VLT51 ProgrammingDocument77 pagesVLT51 ProgrammingAnonymous GbfoQcCNo ratings yet
- Pilferage & Meter TamperDocument76 pagesPilferage & Meter TamperGautam ChattopadhyayNo ratings yet
- Catalogue Limit Switches XC Standard RangeDocument161 pagesCatalogue Limit Switches XC Standard RangeJOSE DANIEL PEREZNo ratings yet
- MANUAL 0015 - VENTILADOR TRILOGY Ver 4 PDFDocument414 pagesMANUAL 0015 - VENTILADOR TRILOGY Ver 4 PDFDiana Marcela CalambasNo ratings yet
- JCQ-8D Manual Instruction - 1Document9 pagesJCQ-8D Manual Instruction - 1MinhNo ratings yet
- 1986 Siliconix FET Databook PDFDocument374 pages1986 Siliconix FET Databook PDFbayman0% (1)
- Controlador de Temperatura OmronDocument2 pagesControlador de Temperatura OmronJhonatan BaezNo ratings yet
- Panasonic TC-50PS14 - GPF12DU ChassisDocument118 pagesPanasonic TC-50PS14 - GPF12DU ChassisburnacusNo ratings yet
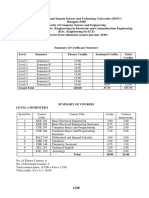
- ECE Syllabus, ECE Department HSTUDocument46 pagesECE Syllabus, ECE Department HSTUIrfan NabilNo ratings yet
- Time Signal Receiver ModuleDocument4 pagesTime Signal Receiver ModuleBorsukNo ratings yet
- History of The TransistorDocument120 pagesHistory of The TransistorfirmanrusydiNo ratings yet
- Chapter 5-Transmission LinesDocument54 pagesChapter 5-Transmission LinesAnis NajihahNo ratings yet
- Ez CurveDocument3 pagesEz CurveGerar MuzNo ratings yet
- Adding A DC Loop Contactor To A Mentor MP: Application Example Using 24 VDC Control Logic (I.e. PLC Control)Document3 pagesAdding A DC Loop Contactor To A Mentor MP: Application Example Using 24 VDC Control Logic (I.e. PLC Control)Mr.K chNo ratings yet
- Guideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemsDocument8 pagesGuideline For Typical Appliance Ratings To Assist in Sizing of PV Solar SystemspriteshjNo ratings yet
- Philips NorelcoDocument2 pagesPhilips Norelcosjaved786No ratings yet
- PDK 028932 Kekw Hardware enDocument228 pagesPDK 028932 Kekw Hardware enwilliam tolentinoNo ratings yet
- VF LRV Orion - 300 I 9010141 enDocument90 pagesVF LRV Orion - 300 I 9010141 enSam WildNo ratings yet
- 2324model Proposal Report 1Document21 pages2324model Proposal Report 1Han hoNo ratings yet
- Tda 1519Document20 pagesTda 1519ahmedNo ratings yet
- E3 Charger Manual-New PDFDocument2 pagesE3 Charger Manual-New PDFअभिजीत कुमारNo ratings yet
- Operators Manual For KDS: Manual Provides Installation, Operation, and Maintenance InstructionsDocument21 pagesOperators Manual For KDS: Manual Provides Installation, Operation, and Maintenance InstructionsRaul Jaime Flores GuardiaNo ratings yet
- M29F080DDocument37 pagesM29F080DHELVER GIOVANNI RODRIGUEZ VEGANo ratings yet