Download as pdf or txt
You might also like
- AVEVA - E3D - 2.1 - Supports Manual PDFDocument144 pagesAVEVA - E3D - 2.1 - Supports Manual PDFsanmite71% (7)
- Instagram Marketing Tutorial PDFDocument13 pagesInstagram Marketing Tutorial PDFnessus starzaNo ratings yet
- Lenovo X380 Yoga X380 Compal STORM3 LA-F421P Rev1.0Document74 pagesLenovo X380 Yoga X380 Compal STORM3 LA-F421P Rev1.0casa12710% (1)
- Virtual Reality: IEEE Potentials May 1998Document6 pagesVirtual Reality: IEEE Potentials May 1998Ãd ÄmNo ratings yet
- Applsci 12 08589 v2Document6 pagesApplsci 12 08589 v2Sheeba TahirNo ratings yet
- Can Virtual Reality Be A Solution Provider For Societal Issues? - A Systematic ReviewDocument7 pagesCan Virtual Reality Be A Solution Provider For Societal Issues? - A Systematic ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Visualization in Virtual Reality: A Systematic Review: Elif Hilal Korkut Elif SurerDocument34 pagesVisualization in Virtual Reality: A Systematic Review: Elif Hilal Korkut Elif SurerrushnaNo ratings yet
- Environments and System Types of Virtual Reality TDocument14 pagesEnvironments and System Types of Virtual Reality THeba GaberNo ratings yet
- Ochristmann, 2010 (09-2) 1x2Document19 pagesOchristmann, 2010 (09-2) 1x2Quỳnh ChiNo ratings yet
- Virtual Reality-An OverviewDocument4 pagesVirtual Reality-An OverviewFor_Educational_PurposeNo ratings yet
- Elbeheiry 2019Document7 pagesElbeheiry 2019Diana IchimNo ratings yet
- T-05 A Survey On Mobile Augmented Reality With 5G II-2021Document33 pagesT-05 A Survey On Mobile Augmented Reality With 5G II-2021VICTOR ALVIN AYVAR RISCONo ratings yet
- 10 1016@j Eswa 2019 06 055Document11 pages10 1016@j Eswa 2019 06 055Akash BachharNo ratings yet
- 2017 Vance IndustryVirtualDocument31 pages2017 Vance IndustryVirtualAditi MishraNo ratings yet
- Computers: An Integrated Mobile Augmented Reality Digital Twin Monitoring SystemDocument20 pagesComputers: An Integrated Mobile Augmented Reality Digital Twin Monitoring SystemNorman SuliNo ratings yet
- LaukkanenDocument6 pagesLaukkanenOak TreeNo ratings yet
- Realidad AumentadaDocument26 pagesRealidad AumentadaJohan William Steven Sanchez SanchezNo ratings yet
- Virtual Reality Past Present and FutureDocument32 pagesVirtual Reality Past Present and Futurepankaj chandnaNo ratings yet
- Background Review - AFM - 21V31 - 39 - Nanowire-Based Soft Wearable Human-Machine Interfaces For Future Virtual and Augmented Reality ApplicationsDocument27 pagesBackground Review - AFM - 21V31 - 39 - Nanowire-Based Soft Wearable Human-Machine Interfaces For Future Virtual and Augmented Reality ApplicationsweishanyunkuiNo ratings yet
- A Comprehensive Study On Augmented Reality in Path FindingDocument5 pagesA Comprehensive Study On Augmented Reality in Path FindingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Virtual Reality Past Present and Future PDFDocument32 pagesVirtual Reality Past Present and Future PDFSyed Asrar asrarNo ratings yet
- Bellanca 2019Document10 pagesBellanca 2019Benito Quispe A.No ratings yet
- AR and VRDocument10 pagesAR and VRmosesNo ratings yet
- Experiments in Immersive Virtual Realityfor Scientific VisualizationDocument21 pagesExperiments in Immersive Virtual Realityfor Scientific VisualizationCyrille LamasséNo ratings yet
- Virtu AL Reali TY: Satara College of Engg. & MGMT, Limb, SataraDocument21 pagesVirtu AL Reali TY: Satara College of Engg. & MGMT, Limb, Sataraprasanna4444No ratings yet
- Applied Sciences: Augmented Reality and Machine Learning Incorporation Using Yolov3 and ArkitDocument19 pagesApplied Sciences: Augmented Reality and Machine Learning Incorporation Using Yolov3 and ArkitAlex LiNo ratings yet
- Understanding Virtual Reality Technology: Advances and ApplicationsDocument20 pagesUnderstanding Virtual Reality Technology: Advances and ApplicationsSneha Giji SajiNo ratings yet
- BITM 3223 Chapter 7Document19 pagesBITM 3223 Chapter 7Reez MeeraNo ratings yet
- Virtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Document32 pagesVirtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Sneha Giji SajiNo ratings yet
- Virtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Document32 pagesVirtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Sneha Giji SajiNo ratings yet
- Virtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Document32 pagesVirtual Reality: Past, Present and Future: Studies in Health Technology and Informatics February 1998Sneha Giji SajiNo ratings yet
- Mixed Reality in Smart Computing Education System: M. V. Pridhvi Krishna, Somesh Mehta, Shubham Verma and Sagar RaneDocument4 pagesMixed Reality in Smart Computing Education System: M. V. Pridhvi Krishna, Somesh Mehta, Shubham Verma and Sagar RaneNICOLAS ALEJANDRO RESTREPO ESTRADANo ratings yet
- !!wearable Soft Technologies For Haptic Sensing and Feedback 2020Document26 pages!!wearable Soft Technologies For Haptic Sensing and Feedback 2020yinglei shiNo ratings yet
- A SEMINAR REPORT Tele-Immersion 1gowDocument25 pagesA SEMINAR REPORT Tele-Immersion 1gowSunil RAYALASEEMA GRAPHICSNo ratings yet
- XR Interaction Toolkit 2Document6 pagesXR Interaction Toolkit 2Fahmi AlifNo ratings yet
- Mobile Substation: Harlal Singh Khairwa Enroll-412/09 Electrical EngineeringgDocument19 pagesMobile Substation: Harlal Singh Khairwa Enroll-412/09 Electrical EngineeringgHarlal KhairwaNo ratings yet
- HCI Unit-6 TechnicalDocument19 pagesHCI Unit-6 Technicalshubham tambadeNo ratings yet
- Introduction Virtual Reality For LearninDocument8 pagesIntroduction Virtual Reality For LearninKamarul Aiman ShariffuddinNo ratings yet
- A Survey Paper On Controlling Computer UDocument5 pagesA Survey Paper On Controlling Computer UgrushaNo ratings yet
- IEEE2023 Transfer Learning Approach To IDS On Cloud IoT Devices Using Optimized CNNDocument16 pagesIEEE2023 Transfer Learning Approach To IDS On Cloud IoT Devices Using Optimized CNNbalavinmailNo ratings yet
- Understanding Virtual Reality Technology: Advances and ApplicationsDocument20 pagesUnderstanding Virtual Reality Technology: Advances and ApplicationsMagnus GalihNo ratings yet
- InTech UnderstandingVirtualRealityTechnologyDocument20 pagesInTech UnderstandingVirtualRealityTechnologyDeepu VijayNo ratings yet
- Video Based Action Recognition RMDocument3 pagesVideo Based Action Recognition RMfs12unoNo ratings yet
- GraphVR A Virtual Reality Tool For The Exploration of Graphs With HTC Vive SystemDocument6 pagesGraphVR A Virtual Reality Tool For The Exploration of Graphs With HTC Vive Systembriandiffo0123No ratings yet
- VR HDM in Proffesional Training - A Systematic ReviewDocument43 pagesVR HDM in Proffesional Training - A Systematic ReviewKrystian UrbańskiNo ratings yet
- 4 - 2016 - ArDocument9 pages4 - 2016 - ArCem ErtuğrulNo ratings yet
- Mixed Reality DocumentationDocument16 pagesMixed Reality DocumentationSri Venu100% (1)
- Factors Influencing The Integration of Virtual Reality (VR) and Augmented Reality (AR) in Everyday Life: A Sentiment Analysis Utilising Machine Learning TechniquesDocument6 pagesFactors Influencing The Integration of Virtual Reality (VR) and Augmented Reality (AR) in Everyday Life: A Sentiment Analysis Utilising Machine Learning TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- 2014 - Human-Computer Interaction With ARDocument30 pages2014 - Human-Computer Interaction With ARCarlwin DayagdagNo ratings yet
- Virtual Reality and Education: By: Giti Javidi Submitted To: Dr. James White EME7938Document52 pagesVirtual Reality and Education: By: Giti Javidi Submitted To: Dr. James White EME7938yahelscribdNo ratings yet
- An Introduction To 3-D User Interface Design: Doug A. BowmanDocument13 pagesAn Introduction To 3-D User Interface Design: Doug A. Bowmanapi-26400509No ratings yet
- Virtual Reality History, Application and FutureDocument6 pagesVirtual Reality History, Application and FutureIJRASETPublicationsNo ratings yet
- Towards Interconnected Virtual Reality: Opportunities, Challenges and EnablersDocument17 pagesTowards Interconnected Virtual Reality: Opportunities, Challenges and EnablersLouie CalmaNo ratings yet
- ReportDocument11 pagesReportViyan SinghNo ratings yet
- Doran 2020Document4 pagesDoran 2020velasco rhoweeNo ratings yet
- A 3D-Deep-Learning-based Augmented Reality Calibration Method ForDocument7 pagesA 3D-Deep-Learning-based Augmented Reality Calibration Method ForManny MerazinniNo ratings yet
- Mixed Reality in Education, Entertainment, and Training: IEEE Computer Graphics and Applications November 2005Document8 pagesMixed Reality in Education, Entertainment, and Training: IEEE Computer Graphics and Applications November 2005Christina GrammatikopoulouNo ratings yet
- Virtual - Reality - in - Medicine ExtraDocument11 pagesVirtual - Reality - in - Medicine ExtraOmid Ernesto Chahuaris ChoqueNo ratings yet
- A Seminar Report On: Submitted TO: Submitted BYDocument15 pagesA Seminar Report On: Submitted TO: Submitted BYJuhitha VemulaNo ratings yet
- Applications of Extended Reality Technologies Within Design PedagogyDocument11 pagesApplications of Extended Reality Technologies Within Design PedagogyVeerajun WaliNo ratings yet
- Desktop Virtual Reality: A Powerful New Technology For Teaching and Research in Industrial Teacher EducationDocument16 pagesDesktop Virtual Reality: A Powerful New Technology For Teaching and Research in Industrial Teacher Educationmoustafa officielNo ratings yet
- 09 Handout 1Document3 pages09 Handout 1Daniela RoldanNo ratings yet
- Topography 2Document115 pagesTopography 2TAVITINAIDUNo ratings yet
- Topography - 2Document17 pagesTopography - 2TAVITINAIDUNo ratings yet
- An Analysis On Proper Exploration Structure and Procedure: By: Dustin HalcombDocument17 pagesAn Analysis On Proper Exploration Structure and Procedure: By: Dustin HalcombTAVITINAIDUNo ratings yet
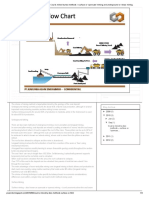
- Open Cast Mining Flow ChartDocument4 pagesOpen Cast Mining Flow ChartTAVITINAIDUNo ratings yet
- Drillhole Compositing: Lithological or Metallurgical CompositesDocument3 pagesDrillhole Compositing: Lithological or Metallurgical CompositesTAVITINAIDUNo ratings yet
- National Institute of Technology, RourkelaDocument9 pagesNational Institute of Technology, RourkelaTAVITINAIDUNo ratings yet
- Mining March2021Document100 pagesMining March2021TAVITINAIDUNo ratings yet
- Multiobjective Evolutionary Algorithm Test SuitesDocument7 pagesMultiobjective Evolutionary Algorithm Test SuitesTássis FernandoNo ratings yet
- Grade 10 Computer Appications Project PDFDocument45 pagesGrade 10 Computer Appications Project PDFkarthikeya kakarlapudi100% (1)
- Tutoriali6 IsightAbaqus CAD CAEDocument16 pagesTutoriali6 IsightAbaqus CAD CAEAna MartinezNo ratings yet
- Innovation in Digital EnvirontmentDocument39 pagesInnovation in Digital EnvirontmenthendrariofitaNo ratings yet
- Node CollateDocument110 pagesNode CollatePERLUESNo ratings yet
- VVI-SAP SD Document For Basic Functions To Business Processes & Many More VviDocument69 pagesVVI-SAP SD Document For Basic Functions To Business Processes & Many More VviANIMESH DAS Animesh DasNo ratings yet
- Neurotechnology Biometric SDKDocument2,863 pagesNeurotechnology Biometric SDKMahad ShyckhNo ratings yet
- OCR in AlfrescoDocument22 pagesOCR in AlfrescoDJ JAMNo ratings yet
- Call For Papers Special Topic of Journal of Forensic Accounting ResearchDocument2 pagesCall For Papers Special Topic of Journal of Forensic Accounting ResearchytrNo ratings yet
- Elective Data and Analytics MIDTERM LABORATORY EXAMINATIONDocument1 pageElective Data and Analytics MIDTERM LABORATORY EXAMINATIONGian CarloNo ratings yet
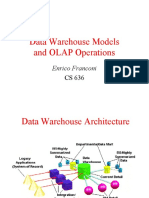
- Data Warehouse Models and OLAP Operations: Enrico FranconiDocument45 pagesData Warehouse Models and OLAP Operations: Enrico FranconiBarty WaineNo ratings yet
- Gigabyte Ga-H61m-S1 Rev. 2.1 SCHDocument29 pagesGigabyte Ga-H61m-S1 Rev. 2.1 SCHMa PontesNo ratings yet
- Pytorch TutorialDocument65 pagesPytorch Tutorial許嘖嘖0% (1)
- 14.08.15-Service-Manual-NG12 รุ่นใหม่ จอสีDocument76 pages14.08.15-Service-Manual-NG12 รุ่นใหม่ จอสีChaovalit JitsinthuNo ratings yet
- Salesforce Admin Interview QuestionsDocument8 pagesSalesforce Admin Interview QuestionsSDBNo ratings yet
- Ict - chs9 Lesson 2 - Conduct Test On The Installed ComputerDocument33 pagesIct - chs9 Lesson 2 - Conduct Test On The Installed ComputerOmengMagcalasNo ratings yet
- IMB2020021 MM Assignment1Document3 pagesIMB2020021 MM Assignment1VidhiNo ratings yet
- ASUS ROG G75VX-BHI7N11 Fans Replacement - Ifixit Repair GuideDocument1 pageASUS ROG G75VX-BHI7N11 Fans Replacement - Ifixit Repair GuideIgacici ŠefNo ratings yet
- Chandan Chiranjeeb Nayak - Digital Marketing - CA4Document3 pagesChandan Chiranjeeb Nayak - Digital Marketing - CA4Chandan Chiranjeeb NayakNo ratings yet
- Activity 3 SolutionDocument4 pagesActivity 3 SolutionKylamae AbroguenaNo ratings yet
- ISC Computer Science XIIDocument5 pagesISC Computer Science XIINishant KawaNo ratings yet
- Dell Emc Isilon Onefs OperatingDocument5 pagesDell Emc Isilon Onefs OperatingJulio Cesar Agudelo BenitezNo ratings yet
- Fiche Produit Mr2100Document4 pagesFiche Produit Mr2100GerardNo ratings yet
- STQA Q AND A For LP 2Document11 pagesSTQA Q AND A For LP 2bigbangNo ratings yet
- DSA Notes 1696643326Document41 pagesDSA Notes 1696643326kvrrNo ratings yet
- Whitepaper-V2-pdf OTT TV Business ModelDocument14 pagesWhitepaper-V2-pdf OTT TV Business ModelRizwan HermawanNo ratings yet
- Traxmaker User ManualDocument220 pagesTraxmaker User Manualrojozurdo100% (1)