Download as pdf or txt
You might also like
- RP Maint GuideDocument10 pagesRP Maint GuideRaja Sekaran SajjaNo ratings yet
- Kadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128Document12 pagesKadhim 2020 IOP Conf. Ser. Mater. Sci. Eng. 881 012128hawicha AbomaNo ratings yet
- Integrated Control of Braking and SteeringDocument10 pagesIntegrated Control of Braking and SteeringakkkkNo ratings yet
- Active Suspension Using SkyhookDocument14 pagesActive Suspension Using SkyhookSandor CleganeNo ratings yet
- Model-Based Design of An Active Suspension For TheDocument21 pagesModel-Based Design of An Active Suspension For Theankon dasNo ratings yet
- Disturbance-Rejection High-Precision Motion Control of A Stewart PlatformDocument11 pagesDisturbance-Rejection High-Precision Motion Control of A Stewart PlatformMax ZemaNo ratings yet
- Active Disturbance Rejection Control in Steering by Wire Haptic SystemsDocument8 pagesActive Disturbance Rejection Control in Steering by Wire Haptic SystemsNGUYEN MANNo ratings yet
- Root Locus Approach in Design of PID Controller FoDocument7 pagesRoot Locus Approach in Design of PID Controller FoSneha KumariNo ratings yet
- Position Feedback Dynamic Surface Control For Pneumatic Actuator Position Servo System PDFDocument11 pagesPosition Feedback Dynamic Surface Control For Pneumatic Actuator Position Servo System PDFRAUL ALEXANDER ABANTO CUBASNo ratings yet
- Development and Evaluation of A 7-DOF Haptic InterfaceDocument9 pagesDevelopment and Evaluation of A 7-DOF Haptic InterfacellNo ratings yet
- A Bottom-Following Preview Controller For Autonomous Underwater VehiclesDocument10 pagesA Bottom-Following Preview Controller For Autonomous Underwater Vehiclesbala985No ratings yet
- Robust Control of A Cable-Driven Soft Exoskeleton Joint For Intrinsic Human-Robot InteractionDocument11 pagesRobust Control of A Cable-Driven Soft Exoskeleton Joint For Intrinsic Human-Robot InteractionHassan abokouraNo ratings yet
- Zhang 2020Document13 pagesZhang 2020Mou KhalilNo ratings yet
- Fuzzy Logic Control of Classic Sdof Spring Mass Dashpot SystemDocument8 pagesFuzzy Logic Control of Classic Sdof Spring Mass Dashpot SystemAhmed.AhmedNo ratings yet
- Applied Sciences: Time-Delay Vibration Reduction Control of 3-DOF Vehicle Model With Vehicle SeatDocument20 pagesApplied Sciences: Time-Delay Vibration Reduction Control of 3-DOF Vehicle Model With Vehicle SeatFresy NugrohoNo ratings yet
- Adaptive Neural Backstepping Control For Flexible-Joint Robot Manipulator With Bounded Torque InputsDocument17 pagesAdaptive Neural Backstepping Control For Flexible-Joint Robot Manipulator With Bounded Torque InputsXuan ChiemNo ratings yet
- Ieee TCST 2018 0642Document9 pagesIeee TCST 2018 06422jaiprakash6No ratings yet
- Modeling and Control of A Nonlinear Active Suspension Using Multi-Body Dynamics System SoftwareDocument13 pagesModeling and Control of A Nonlinear Active Suspension Using Multi-Body Dynamics System SoftwareNguyễn Khắc TâmNo ratings yet
- Research On Deep Reinforcement Learning Control AlDocument20 pagesResearch On Deep Reinforcement Learning Control Alankon dasNo ratings yet
- New Intelligent AVR Controller Based On Particle Swarm Optimization For Transient Stability EnhancementDocument6 pagesNew Intelligent AVR Controller Based On Particle Swarm Optimization For Transient Stability EnhancementnaghamNo ratings yet
- Heavy Trucks With Intelligent Control of Active Suspension Based On Artificial Neural NetworksDocument18 pagesHeavy Trucks With Intelligent Control of Active Suspension Based On Artificial Neural Networksmb.farooqui02No ratings yet
- Ahi 2017Document8 pagesAhi 2017Mohammed KhaledNo ratings yet
- 2267 Hay PDFDocument13 pages2267 Hay PDFHoang Duc ThucNo ratings yet
- Modeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeDocument4 pagesModeling and Control of Unmanned Aerial Vehicle: D. Y. Dube R. K. MunjeMahdi LabedNo ratings yet
- Adaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesDocument8 pagesAdaptive Output-Feedback Image-Based Visual Servoing For Quadrotor Unmanned Aerial VehiclesAdeeba AliNo ratings yet
- J Jestch 2020 10 006Document12 pagesJ Jestch 2020 10 006Rushikesh SadavarteNo ratings yet
- Active Engine Mounting Control Algorithm Using NeuDocument23 pagesActive Engine Mounting Control Algorithm Using Neuabbas aliakbariNo ratings yet
- Nonlinear Robust Adaptive Tracking Control of A Quadrotor UAV Via Immersion and Invariance MethodologyDocument12 pagesNonlinear Robust Adaptive Tracking Control of A Quadrotor UAV Via Immersion and Invariance MethodologyThế Anh NguyễnNo ratings yet
- Design and Stability Analysis of High-Speed Unmanned Aerial Vehicle Electric Anti-Skid Braking SystemDocument17 pagesDesign and Stability Analysis of High-Speed Unmanned Aerial Vehicle Electric Anti-Skid Braking Systemkarthik karunanidhiNo ratings yet
- Nonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemDocument15 pagesNonlinear Control Design Using Takagi-Sugeno Fuzzy Applied To Under-Actuated Visual Servo SystemdangquanginhaNo ratings yet
- Refference CheckDocument5 pagesRefference CheckQuyết Nguyễn CôngNo ratings yet
- Active Suspension - Case Study On Robust Control: Kruczek A., Stříbrský A., Honců J., Hlinovský MDocument6 pagesActive Suspension - Case Study On Robust Control: Kruczek A., Stříbrský A., Honců J., Hlinovský Mmallikarjuna.handiNo ratings yet
- Enhancing Performance and Stability of Gain-Scheduling Control SystemDocument21 pagesEnhancing Performance and Stability of Gain-Scheduling Control SystemAisha Sir ElkhatemNo ratings yet
- Load Frequency Control Optimization Using PSO Based Integral ControllerDocument7 pagesLoad Frequency Control Optimization Using PSO Based Integral ControllerMekonnen ShewaregaNo ratings yet
- 1 s2.0 S092188902100155X MainDocument15 pages1 s2.0 S092188902100155X MainSherjanNo ratings yet
- Results in Physics: Mundher H.A. Yaseen, Haider J. AbdDocument7 pagesResults in Physics: Mundher H.A. Yaseen, Haider J. Abdbabylon telecomNo ratings yet
- Real-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterDocument6 pagesReal-Time Embedded Control System For VTOL Aircrafts: Application To Stabilize A Quad-Rotor HelicopterasdssNo ratings yet
- An Optimal Vibration Control Strategy For A Vehicle's Active Suspension Based On Improved Cultural AlgorithmDocument8 pagesAn Optimal Vibration Control Strategy For A Vehicle's Active Suspension Based On Improved Cultural AlgorithmMateo RamirezNo ratings yet
- An Asynchronous Multi-Body Simulation Framework For Real-Time Dynamics Haptics and Learning With Application To Surgical RobotsDocument8 pagesAn Asynchronous Multi-Body Simulation Framework For Real-Time Dynamics Haptics and Learning With Application To Surgical RobotsSyed Muhammad AlamNo ratings yet
- Robust Localization of An Autonomous Underwater Vehicle: A Comparative StudyDocument7 pagesRobust Localization of An Autonomous Underwater Vehicle: A Comparative Studyspandan_roy_1989No ratings yet
- Fast Swing-Up Trajectory Optimization For A Spherical Pendulum On A 7-DoF Collaborative RobotDocument7 pagesFast Swing-Up Trajectory Optimization For A Spherical Pendulum On A 7-DoF Collaborative RobotThanh Hai NguyenNo ratings yet
- Sensors 23 07827 With CoverDocument21 pagesSensors 23 07827 With Coverankon dasNo ratings yet
- Vibration Control Using Semi-Active Force Generators: D. KarnoppDocument8 pagesVibration Control Using Semi-Active Force Generators: D. KarnoppLegis FloyenNo ratings yet
- Actuators 12 00290Document15 pagesActuators 12 00290Vinicius MartinsNo ratings yet
- Adaptive Neural Network Force Tracking Control of Flexible Joint Robot With An Uncertain EnvironmentDocument9 pagesAdaptive Neural Network Force Tracking Control of Flexible Joint Robot With An Uncertain EnvironmentJosé Bráulio VilaçaNo ratings yet
- E1FLA5 2014 v14n2 136Document9 pagesE1FLA5 2014 v14n2 136tou kaiNo ratings yet
- Robust Integral Backstepping and Terminal Synergetic Control of Course Keeping For SHIPS PDFDocument10 pagesRobust Integral Backstepping and Terminal Synergetic Control of Course Keeping For SHIPS PDFSamama ZafarNo ratings yet
- Project Proposal Guide SampleDocument7 pagesProject Proposal Guide SampleajohariNo ratings yet
- PHD ACODocument13 pagesPHD ACOPrasadYadavNo ratings yet
- Adaptive Neural Impedance Control of A Robotic Manipulator With Input SaturationDocument11 pagesAdaptive Neural Impedance Control of A Robotic Manipulator With Input SaturationAgil AgilNo ratings yet
- Neural-Learning-Based Telerobot Control With Guaranteed PerformanceDocument12 pagesNeural-Learning-Based Telerobot Control With Guaranteed PerformanceDanilo Carvajal MarinNo ratings yet
- Vertical Vibration Control of An In-Wheel Motor-Driven Electric Vehicle Using An In-Wheel Active Vibration SystemDocument18 pagesVertical Vibration Control of An In-Wheel Motor-Driven Electric Vehicle Using An In-Wheel Active Vibration SystemShiva HareshNo ratings yet
- Neural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsDocument9 pagesNeural-Adaptive Output Feedback Control of A Class of Transportation Vehicles Based On Wheeled Inverted Pendulum ModelsKuldeep KumarNo ratings yet
- Neural Network-Based Adaptive Asymptotic Prescribed Performance Tracking Control of Hydraulic ManipulatorsDocument11 pagesNeural Network-Based Adaptive Asymptotic Prescribed Performance Tracking Control of Hydraulic ManipulatorsDong HoangNo ratings yet
- 88 IjecsDocument15 pages88 IjecsMuhammad RamishNo ratings yet
- IEEE Conference Template 2Document3 pagesIEEE Conference Template 2Alvaro Martin Reyes CordovaNo ratings yet
- Research Interact With Human Statement 3Document12 pagesResearch Interact With Human Statement 3Alexander Waiganjo MachariaNo ratings yet
- Mathematical Model and Vibration Analysis of Aircraft With Active Landing GearsDocument18 pagesMathematical Model and Vibration Analysis of Aircraft With Active Landing GearsRodrigo Santos FerreiraNo ratings yet
- Design of A Modified Linear Quadratic Regulator For Vibration Control of Suspension SystemsDocument2 pagesDesign of A Modified Linear Quadratic Regulator For Vibration Control of Suspension SystemsTry SusantoNo ratings yet
- Automated Reverse Braking System PDFDocument7 pagesAutomated Reverse Braking System PDFVaishakhan KNo ratings yet
- MET2016 Snyder AlexDocument31 pagesMET2016 Snyder AlexRaja Sekaran SajjaNo ratings yet
- Parkin 2007Document138 pagesParkin 2007Raja Sekaran SajjaNo ratings yet
- Shocks Oil - Comparison ReportDocument2 pagesShocks Oil - Comparison ReportRaja Sekaran SajjaNo ratings yet
- ATRO Field Manual 061214Document68 pagesATRO Field Manual 061214Raja Sekaran Sajja100% (1)
- Gabriel Annual Report 2015-16Document151 pagesGabriel Annual Report 2015-16Raja Sekaran SajjaNo ratings yet
- LP Lpo 1515Document2 pagesLP Lpo 1515Raja Sekaran SajjaNo ratings yet
- Paving Streets-Part 1Document15 pagesPaving Streets-Part 1Raja Sekaran SajjaNo ratings yet
- 13 Effective Natural Remedies To Keep Bees AwayDocument14 pages13 Effective Natural Remedies To Keep Bees AwayRaja Sekaran SajjaNo ratings yet
- 3D Asphalt Contruction of Special ProfilesDocument30 pages3D Asphalt Contruction of Special ProfilesRaja Sekaran SajjaNo ratings yet
- IPHONE - How To Free Up SpaceDocument34 pagesIPHONE - How To Free Up SpaceRaja Sekaran SajjaNo ratings yet
- US4095682 - Position Sensitive DampingDocument8 pagesUS4095682 - Position Sensitive DampingRaja Sekaran SajjaNo ratings yet
- Spring Tech 101Document8 pagesSpring Tech 101Raja Sekaran SajjaNo ratings yet
- Road SignsDocument24 pagesRoad SignsRaja Sekaran SajjaNo ratings yet
- LENOVO K3 NOTE K50-T3S Specifications, Price Compare, Features, ReviewDocument11 pagesLENOVO K3 NOTE K50-T3S Specifications, Price Compare, Features, ReviewRaja Sekaran SajjaNo ratings yet
- Pavement MarkingsDocument4 pagesPavement MarkingsRaja Sekaran SajjaNo ratings yet
- How To Increase Storage in IphoneDocument34 pagesHow To Increase Storage in IphoneRaja Sekaran SajjaNo ratings yet
- Pedestrian SignalsDocument2 pagesPedestrian SignalsRaja Sekaran SajjaNo ratings yet
- Landscape PhotographyDocument9 pagesLandscape PhotographyRaja Sekaran SajjaNo ratings yet
- How To Photograph The Milky Way - A Detailed Guide For BeginnersDocument44 pagesHow To Photograph The Milky Way - A Detailed Guide For BeginnersRaja Sekaran SajjaNo ratings yet
- Everything You Need To Know About Macro Lenses - Food Photography AcademyDocument30 pagesEverything You Need To Know About Macro Lenses - Food Photography AcademyRaja Sekaran SajjaNo ratings yet
- Experimental Investigation On Road Vehicle Active SuspensionDocument6 pagesExperimental Investigation On Road Vehicle Active SuspensionRaja Sekaran SajjaNo ratings yet
- ViewNX 2 - NikonDocument3 pagesViewNX 2 - NikonRaja Sekaran SajjaNo ratings yet
- Dynamic Behaviour of An Air Spring ElementDocument4 pagesDynamic Behaviour of An Air Spring ElementRaja Sekaran SajjaNo ratings yet
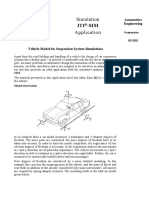
- ITI - Sim: Simulation ApplicationDocument2 pagesITI - Sim: Simulation ApplicationRaja Sekaran SajjaNo ratings yet
- ITI - Sim: Simulation ApplicationDocument2 pagesITI - Sim: Simulation ApplicationRaja Sekaran SajjaNo ratings yet
- ITI - Sim: Simulation ApplicationDocument4 pagesITI - Sim: Simulation ApplicationRaja Sekaran SajjaNo ratings yet
- Your Partner in Drive Simulation, Vehicle Dynamics, and Virtual TestingDocument2 pagesYour Partner in Drive Simulation, Vehicle Dynamics, and Virtual TestingRaja Sekaran SajjaNo ratings yet
- Stabilizer Bars: Part 2. Calculations - Example: Adam-Markus WITTEK, Hans-Christian RICHTER Bogusław ŁAZARZDocument9 pagesStabilizer Bars: Part 2. Calculations - Example: Adam-Markus WITTEK, Hans-Christian RICHTER Bogusław ŁAZARZRaja Sekaran SajjaNo ratings yet
- Part Ix: Reactive Silencers: Industrial Noise SeriesDocument8 pagesPart Ix: Reactive Silencers: Industrial Noise SeriesRaja Sekaran SajjaNo ratings yet
- A Note On The Existence of The Multivariate GammaDocument7 pagesA Note On The Existence of The Multivariate GammaAgnes PukaNo ratings yet
- Smart Buildings: John Smiciklas Director, BOMA Canada Jsmiciklas@bomacanada - CaDocument24 pagesSmart Buildings: John Smiciklas Director, BOMA Canada Jsmiciklas@bomacanada - Catest testNo ratings yet
- Salwico IC21 WP: Indication Control UnitDocument5 pagesSalwico IC21 WP: Indication Control UnitrolandseNo ratings yet
- Strength 2 DLSU DasmaDocument1 pageStrength 2 DLSU Dasmabandureview2324No ratings yet
- Science 10 TosDocument5 pagesScience 10 TosMenard Licuanan RosalesNo ratings yet
- Critical Response Essay ExampleDocument6 pagesCritical Response Essay ExampleafabifazvNo ratings yet
- Accumulation of Heavy Metals in SpinaciaDocument12 pagesAccumulation of Heavy Metals in SpinaciaSachin SrivastavaNo ratings yet
- "European Exploration and Settlement", U.S History Class Assignment, Howard Zinn, Issaquah School DistrictDocument8 pages"European Exploration and Settlement", U.S History Class Assignment, Howard Zinn, Issaquah School District81731No ratings yet
- Scott Russell Mechanism-1 HJKDocument7 pagesScott Russell Mechanism-1 HJKSenthil Selvam0% (1)
- Tuning of PID Controller: What Is A PID Control?Document4 pagesTuning of PID Controller: What Is A PID Control?Mohammad HussnainNo ratings yet
- Flare Pit Cleaning TechnologyDocument27 pagesFlare Pit Cleaning TechnologyAhmed GamaladdinNo ratings yet
- English 4 BAC: Nassime El MaataouiDocument52 pagesEnglish 4 BAC: Nassime El Maataouiayoub rhNo ratings yet
- Acadamic StressDocument23 pagesAcadamic Stressalene100% (1)
- Application Form For Non-Teaching PostsDocument3 pagesApplication Form For Non-Teaching PostsMrs. Dhwani Hakani ADF-PHDNo ratings yet
- C-Reactive Protein (CRP)Document9 pagesC-Reactive Protein (CRP)Ibrahim Alturaiki100% (1)
- Frank ISC Mathematics Model Test Paper 20Document3 pagesFrank ISC Mathematics Model Test Paper 20Rohan Chakraborty100% (3)
- BrochureDocument56 pagesBrochureG.S. TutorialsNo ratings yet
- Parallel Plate Capactior SimulationDocument8 pagesParallel Plate Capactior Simulationapi-300597191100% (1)
- Be Curious 4 Projects Teachers GuideDocument7 pagesBe Curious 4 Projects Teachers GuideValeria Valentina Valenzuela HinojosaNo ratings yet
- Crack Width Cal-T Beam-Euro CodeDocument10 pagesCrack Width Cal-T Beam-Euro CodeGautham AllimuthuNo ratings yet
- Product AI845Document4 pagesProduct AI845Hernan Humberto Castañeda MendozaNo ratings yet
- R20 MECH SyllabusDocument264 pagesR20 MECH SyllabusSujitha SunilNo ratings yet
- G9 TSC - Diary EntryDocument4 pagesG9 TSC - Diary EntryRoshani SamantNo ratings yet
- Ax 100Document25 pagesAx 100Oscar Caetano FontNo ratings yet
- Achieving Superior Strength and Ductility Combination Through Cryorolling in 2219 Aluminum AlloyDocument9 pagesAchieving Superior Strength and Ductility Combination Through Cryorolling in 2219 Aluminum AlloyPATIL VISHWESH NARENDRANo ratings yet
- RBSS wt10 enDocument3 pagesRBSS wt10 enNguyen Van TruongNo ratings yet
- Conditional ProbabilityDocument3 pagesConditional ProbabilityAustin EllisNo ratings yet
- Ich E2f DsurDocument23 pagesIch E2f Dsurvinay patidarNo ratings yet
- Applications and Interpretation Higher November 2021 Paper 3 MSDocument12 pagesApplications and Interpretation Higher November 2021 Paper 3 MSsachinNo ratings yet
- PDF 1Document302 pagesPDF 1LuckyNo ratings yet