Download as pdf or txt
You might also like
- nextLI Blue Economy ResearchDocument73 pagesnextLI Blue Economy ResearchNewsday100% (1)
- Communication System Relay GuideDocument7 pagesCommunication System Relay Guideb33lawNo ratings yet
- Enabling Teleprotection Via Packet Switched NetworksDocument22 pagesEnabling Teleprotection Via Packet Switched NetworksPathmnathan Gopal PillayNo ratings yet
- Teleprotection Solutions With Guaranteed Performance Using Packet Switched Wide Area Communication NetworksDocument6 pagesTeleprotection Solutions With Guaranteed Performance Using Packet Switched Wide Area Communication NetworksBrett AtkinsNo ratings yet
- Study Committee B5 Colloquium 2007 October 15-20 Madrid, SPAINDocument13 pagesStudy Committee B5 Colloquium 2007 October 15-20 Madrid, SPAINraghavendran raghuNo ratings yet
- Powersystem Protection ESSAMARIFIDocument62 pagesPowersystem Protection ESSAMARIFIbureyh98No ratings yet
- Micom P740Document18 pagesMicom P740vsrikala68No ratings yet
- CommsSubstationC R Ozansoy1Document7 pagesCommsSubstationC R Ozansoy1Fernando RojasNo ratings yet
- A C P W I C S: Ttacks To Ryptography Rotocols of Ireless Ndustrial Ommunication YstemsDocument6 pagesA C P W I C S: Ttacks To Ryptography Rotocols of Ireless Ndustrial Ommunication Ystemskashif majeed janjuaNo ratings yet
- 26 Relay Testing Techniques, Requirements, Considerations MDocument8 pages26 Relay Testing Techniques, Requirements, Considerations Mgagan0312No ratings yet
- CIGRE 2010: 21, Rue D'artois, F-75008 PARISDocument8 pagesCIGRE 2010: 21, Rue D'artois, F-75008 PARISkponramNo ratings yet
- Improving The Management) Protection and Control System Assets by Using A Platform ConceptDocument5 pagesImproving The Management) Protection and Control System Assets by Using A Platform Conceptkvasquez1979No ratings yet
- Inter Trip RelayDocument10 pagesInter Trip RelayNam Hoai Le100% (1)
- Hybrid Fuzzy Evaluation Algorithm For Power System Protection Security AssessmentDocument8 pagesHybrid Fuzzy Evaluation Algorithm For Power System Protection Security Assessmentpaisul pareeNo ratings yet
- Evolving Protection and Control Solutions For A Changing WorldDocument10 pagesEvolving Protection and Control Solutions For A Changing WorldJayam KondanNo ratings yet
- Protection SettingsDocument33 pagesProtection SettingsirfanWPK100% (1)
- 21, Rue D'artois, F-75008 PARIS: CIGRE 2016Document10 pages21, Rue D'artois, F-75008 PARIS: CIGRE 2016Marko KojicNo ratings yet
- 2170908Document33 pages2170908bhavikNo ratings yet
- Protection Control Journal: Capacitor BankDocument92 pagesProtection Control Journal: Capacitor BankSiddharth krishnaswamyNo ratings yet
- Mho Relay 4 PDFDocument6 pagesMho Relay 4 PDFArion BaboolalNo ratings yet
- Transmission Line Protection Systems With Aided CommunicationDocument8 pagesTransmission Line Protection Systems With Aided CommunicationJosé MéndezNo ratings yet
- Nrjed311332en Npag 2014Document797 pagesNrjed311332en Npag 2014msiantexNo ratings yet
- Do Utilities Still Need Stand Alone Disturbance Recorders?Document7 pagesDo Utilities Still Need Stand Alone Disturbance Recorders?Akhtar CoolNo ratings yet
- Power System Protection PDFDocument12 pagesPower System Protection PDFBala MNo ratings yet
- Protection & Automation Alstom GuideDocument474 pagesProtection & Automation Alstom GuideRatoka Lekhema75% (4)
- Protection of Electrical SystemDocument34 pagesProtection of Electrical SystemDan C. LabagnoyNo ratings yet
- Reliabilty of Protection Systems What Are The Real ConcernsDocument16 pagesReliabilty of Protection Systems What Are The Real ConcernsZunairaNazirNo ratings yet
- Distefano2015 SecureRTU Security On RTU Configuration Management by Digital SignaturesDocument6 pagesDistefano2015 SecureRTU Security On RTU Configuration Management by Digital Signaturesedsonpaveli-1No ratings yet
- ProtectionDocument451 pagesProtectionmis3124100% (1)
- NPAGDocument464 pagesNPAGshinusehra15No ratings yet
- An Intelligent Algorithm For The Protection of Smart Power SystemsDocument8 pagesAn Intelligent Algorithm For The Protection of Smart Power SystemsAhmed WestministerNo ratings yet
- Control and Management Issues in All-Optical Networks: Ridha RejebDocument8 pagesControl and Management Issues in All-Optical Networks: Ridha RejebKarthik VenkataramanNo ratings yet
- 20 266 PDFDocument8 pages20 266 PDFNirmal mehtaNo ratings yet
- Real Time Digital Simulator (RTDS) For Testing and TrainingDocument2 pagesReal Time Digital Simulator (RTDS) For Testing and TrainingzararNo ratings yet
- Security in Optical NetworksDocument21 pagesSecurity in Optical NetworksDivonikaNo ratings yet
- FlexCAN ArchitectureDocument11 pagesFlexCAN Architecturegin220No ratings yet
- Quest 01Document10 pagesQuest 01Muhammad Ibrahim MarwatNo ratings yet
- Protection FundamentalsDocument12 pagesProtection FundamentalsGeorge AsuncionNo ratings yet
- ELEC 4302/7311 P S P: P: Ower Ystem Rotection Rotection SettingsDocument33 pagesELEC 4302/7311 P S P: P: Ower Ystem Rotection Rotection SettingsAtila TuturuNo ratings yet
- Lecture 13Document16 pagesLecture 13Kamran AhmedNo ratings yet
- Protection Coordination Analysis Under A Real-Time Architecture For Industrial Distribution Systems Based On The STD IEEE 242-2001Document8 pagesProtection Coordination Analysis Under A Real-Time Architecture For Industrial Distribution Systems Based On The STD IEEE 242-2001Isai Gallardo VazquezNo ratings yet
- LWP0039-01 Anterix WhitepaperDocument20 pagesLWP0039-01 Anterix WhitepaperVerdierNo ratings yet
- Analysis of Microgrid Protection StrategiesDocument6 pagesAnalysis of Microgrid Protection StrategiesDavid LiNo ratings yet
- Ziegler Protection1Document10 pagesZiegler Protection1Jose Alberto RodriguezNo ratings yet
- Protection Strategies For Improving Qu'Qlity of Supply: 2,5 Year Period Are Correlated With 2624 FaultDocument4 pagesProtection Strategies For Improving Qu'Qlity of Supply: 2,5 Year Period Are Correlated With 2624 Faultkvasquez1979No ratings yet
- Adaptive Non-Communication Protection For Power Lines BO Scheme 1-The Delayed Operation ApproachDocument7 pagesAdaptive Non-Communication Protection For Power Lines BO Scheme 1-The Delayed Operation ApproachChristos ApostolopoulosNo ratings yet
- Ericsson Network SecurityDocument14 pagesEricsson Network SecuritytousifaslamNo ratings yet
- NW Installations.Document11 pagesNW Installations.Shiju Kp.No ratings yet
- ProposalDocument4 pagesProposaldattrinh2204No ratings yet
- 10.1109 Icenco.2017.8289796 J73uDocument6 pages10.1109 Icenco.2017.8289796 J73usima.sobhi70No ratings yet
- Cyber SecurityDocument34 pagesCyber SecurityShubhra ShahNo ratings yet
- Network Automation DevilDocument15 pagesNetwork Automation Devilrkjadhav1453No ratings yet
- Trafo 3 AsdDocument4 pagesTrafo 3 AsdAchyar Maulana PratamaNo ratings yet
- EAI Endorsed TransactionsDocument14 pagesEAI Endorsed TransactionsAnooshdini2002No ratings yet
- Industrial Sensors and Controls in Communication Networks: From Wired Technologies to Cloud Computing and the Internet of ThingsFrom EverandIndustrial Sensors and Controls in Communication Networks: From Wired Technologies to Cloud Computing and the Internet of ThingsNo ratings yet
- Safe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsFrom EverandSafe Use of Smart Devices in Systems Important to Safety in Nuclear Power PlantsNo ratings yet
- The CompTIA Network+ & Security+ Certification: 2 in 1 Book- Simplified Study Guide Eighth Edition (Exam N10-008) | The Complete Exam Prep with Practice Tests and Insider Tips & Tricks | Achieve a 98% Pass Rate on Your First Attempt!From EverandThe CompTIA Network+ & Security+ Certification: 2 in 1 Book- Simplified Study Guide Eighth Edition (Exam N10-008) | The Complete Exam Prep with Practice Tests and Insider Tips & Tricks | Achieve a 98% Pass Rate on Your First Attempt!No ratings yet
- Wireless Communications Security: Solutions for the Internet of ThingsFrom EverandWireless Communications Security: Solutions for the Internet of ThingsNo ratings yet
- Electronic Diversity Visa ProgramDocument7 pagesElectronic Diversity Visa ProgramYasirOsmanNo ratings yet
- R123 R500 R123 R500: Pressure Vacuum Equivalents Pressure Vacuum EquivalentsDocument2 pagesR123 R500 R123 R500: Pressure Vacuum Equivalents Pressure Vacuum EquivalentsYasirOsmanNo ratings yet
- Tele-Protection: Fundamentals and ApplicationsDocument92 pagesTele-Protection: Fundamentals and ApplicationsYasirOsmanNo ratings yet
- Electrical Window Regulator - 08-2000Document5 pagesElectrical Window Regulator - 08-2000YasirOsmanNo ratings yet
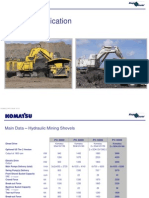
- 11 - PC8000 - 6 ApplDocument37 pages11 - PC8000 - 6 Appljhon jairo trujillo100% (1)
- The Story of Adam and EveDocument3 pagesThe Story of Adam and EveJensen ManaloNo ratings yet
- Fluid 04Document104 pagesFluid 04Edgar HuancaNo ratings yet
- Practice Questions and SolutionsDocument7 pagesPractice Questions and SolutionsLiy TehNo ratings yet
- Department of Electronics and Communication Engineering: Dhirajlal College of TechnologyDocument5 pagesDepartment of Electronics and Communication Engineering: Dhirajlal College of TechnologyRavi ChandranNo ratings yet
- 2003 Crisis Management and Tourism Beyond The RhetoricDocument24 pages2003 Crisis Management and Tourism Beyond The RhetoricPantazis PastrasNo ratings yet
- 71 75 PBDocument63 pages71 75 PBJoey FalaNo ratings yet
- AI Aur Sunni Naujawan (Roman Urdu)Document26 pagesAI Aur Sunni Naujawan (Roman Urdu)Mustafawi PublishingNo ratings yet
- Social Media Strategies For OnlineDocument69 pagesSocial Media Strategies For OnlineNamitaGupta100% (2)
- Right and Wrong in Writing Test Cases.v4 PublicDocument64 pagesRight and Wrong in Writing Test Cases.v4 PublicAnil KanchiNo ratings yet
- Bira 91Document11 pagesBira 91Rishab Gupta100% (2)
- Historia The FelidsDocument5 pagesHistoria The Felidsbalim01100% (1)
- Murat by Alexandre DumasDocument48 pagesMurat by Alexandre DumasEdina OrbánNo ratings yet
- Menstra - Chapter 2 Leadership Agility VUCA Nick HorneyDocument16 pagesMenstra - Chapter 2 Leadership Agility VUCA Nick HorneyanakristianaNo ratings yet
- Acessories ThermoDocument29 pagesAcessories ThermoValquiria MoraesNo ratings yet
- Module 2-English Worksheet-SourcesDocument2 pagesModule 2-English Worksheet-SourcesMarife GuadalupeNo ratings yet
- Erasmus Presentation - 27 AbrilDocument11 pagesErasmus Presentation - 27 AbrilPaulo TavaresNo ratings yet
- SLP Unisa 2014 All CollegesDocument324 pagesSLP Unisa 2014 All CollegesWerner LouwNo ratings yet
- Jan 22 P1R QPDocument36 pagesJan 22 P1R QPAbirNo ratings yet
- Jawaban Pma 1-100Document4 pagesJawaban Pma 1-100Agung KurniawanNo ratings yet
- Cpale Syllabus 2022Document27 pagesCpale Syllabus 2022BlueBladeNo ratings yet
- Motherboard Asus X99 DeluxeDocument10 pagesMotherboard Asus X99 DeluxeAlexandar ŠkaraNo ratings yet
- GTB Jeremiah DownloadDocument87 pagesGTB Jeremiah DownloadEdwin PitangaNo ratings yet
- Zhao - An Intertextual Approach To Translation at The Macro-LevelDocument9 pagesZhao - An Intertextual Approach To Translation at The Macro-LevelangielskiajNo ratings yet
- RealVNC Enterprise Edition 4Document2 pagesRealVNC Enterprise Edition 4fannybrawijayaNo ratings yet
- Letter of Reference Angela Mathew 1Document3 pagesLetter of Reference Angela Mathew 1api-490106269No ratings yet
- Tickler Final PDFDocument29 pagesTickler Final PDFSerious LeoNo ratings yet
- English-Speaking Countries CanadaDocument17 pagesEnglish-Speaking Countries CanadaTukan NakutNo ratings yet
- Silo - Tips - American Sportworks Parts Price List Effective 5 1 11Document45 pagesSilo - Tips - American Sportworks Parts Price List Effective 5 1 11boomissyNo ratings yet