Download as pdf or txt
You might also like
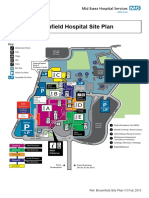
- Broomfield Hospital Site Plan: Café Shops Lifts Information PointsDocument1 pageBroomfield Hospital Site Plan: Café Shops Lifts Information Pointsady trader0% (2)
- Project Proposal On Dairy FarmDocument26 pagesProject Proposal On Dairy Farmvector dairy88% (8)
- Sample Scoping ReportDocument92 pagesSample Scoping ReportEm Mar0% (1)
- 2014 - Comparative Study of PMSM and SRM Capabilities-IEEE - POWERENG - 2013 - LEBSIRDocument5 pages2014 - Comparative Study of PMSM and SRM Capabilities-IEEE - POWERENG - 2013 - LEBSIRHieu LENo ratings yet
- Flux Characteristics Analysis of A Single-Phase Tubular Permanent Magnet Linear Motor Based On 3-D Magnetic Equivalent CircuitDocument7 pagesFlux Characteristics Analysis of A Single-Phase Tubular Permanent Magnet Linear Motor Based On 3-D Magnetic Equivalent CircuitRahulKashyapNo ratings yet
- Paper FinalDocument6 pagesPaper FinalFrans LoekitoNo ratings yet
- Fault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorDocument12 pagesFault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorAbir HezziNo ratings yet
- Different Modulation Techniques PDFDocument5 pagesDifferent Modulation Techniques PDFnaseer m a abdul khadarNo ratings yet
- ELECTRIMACS - 2017 - Geometry Optimization To Increase The Flux Control of A DESMDocument6 pagesELECTRIMACS - 2017 - Geometry Optimization To Increase The Flux Control of A DESMKi ChunNo ratings yet
- Fault-Tolerant Control Strategy For Five-Phase PMSM With Third-Harmonic Current InjectionDocument9 pagesFault-Tolerant Control Strategy For Five-Phase PMSM With Third-Harmonic Current InjectionAbir HezziNo ratings yet
- Control Limits of Three-Phase AC Voltage Controller Under Induction Motor LoadDocument6 pagesControl Limits of Three-Phase AC Voltage Controller Under Induction Motor LoadAnonymous t3ibFCVNo ratings yet
- Systematization of The Simulation Process of TransDocument17 pagesSystematization of The Simulation Process of TransMichael NgoNo ratings yet
- Four-Module Three-Phase PMSM Drive For Suppressing Vibration and Common-Mode CurrentDocument10 pagesFour-Module Three-Phase PMSM Drive For Suppressing Vibration and Common-Mode CurrentTushar NistaneNo ratings yet
- Comparative Evaluation Between Theoretical Models For Three-Phase Induction Motor Under Voltage UnbalanceDocument6 pagesComparative Evaluation Between Theoretical Models For Three-Phase Induction Motor Under Voltage UnbalanceDante HollandaNo ratings yet
- Calculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsDocument4 pagesCalculation of Total Current Harmonic Distortion by PWM Method For Permanent Magnet Synchronous MotorsShakeel RanaNo ratings yet
- Field-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonDocument9 pagesField-Weakening Control Schemes For High-Speed Drives Based On Induction Motors: A ComparisonTrần Tấn LộcNo ratings yet
- 10 1109@iecon 2018 8591235Document8 pages10 1109@iecon 2018 8591235apacheNo ratings yet
- Torsional Vibration Analysis of Reciprocating CompDocument12 pagesTorsional Vibration Analysis of Reciprocating CompmuhdfadzleeNo ratings yet
- Minimizing Total Harmonic Distortion of A Two-Level Voltage Source Inverter Using Optimal Third Harmonic InjectionDocument11 pagesMinimizing Total Harmonic Distortion of A Two-Level Voltage Source Inverter Using Optimal Third Harmonic InjectionTony starkNo ratings yet
- Design and Construction of A Sensorless Circuit For Brushless DC Motor Using Third Harmonic Back Electromotive ForceDocument8 pagesDesign and Construction of A Sensorless Circuit For Brushless DC Motor Using Third Harmonic Back Electromotive ForcealexanderNo ratings yet
- BH-curve of m400 SteelDocument9 pagesBH-curve of m400 SteelmorashidNo ratings yet
- e-Publications@Marquette e-Publications@MarquetteDocument29 pagese-Publications@Marquette e-Publications@MarquetteAmeerkhanNo ratings yet
- Analysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC GeneratorDocument11 pagesAnalysis of Reactive Power Compensation Effect of A New Hybrid Excitation Brushless DC Generatorlinnan sunNo ratings yet
- ICCES09 No123Document6 pagesICCES09 No123Eduardo KilianNo ratings yet
- ICCES09 No123Document6 pagesICCES09 No123Eduardo KilianNo ratings yet
- 418 DallasDocument6 pages418 DallasbaradaranhamidNo ratings yet
- Study of Wind Tunnel and Computational Workflow Analysis of Sub-Sonic Wind TunnelDocument5 pagesStudy of Wind Tunnel and Computational Workflow Analysis of Sub-Sonic Wind Tunnelveer taleleNo ratings yet
- Cjee 2017 8048412Document9 pagesCjee 2017 8048412Zain BhinderNo ratings yet
- Phase Current Control of A Two Phase Synchronous Reluctance MachineDocument7 pagesPhase Current Control of A Two Phase Synchronous Reluctance MachineapacheNo ratings yet
- Terminal Voltage Waveform ComponentsDocument6 pagesTerminal Voltage Waveform ComponentshamidrezaNo ratings yet
- A Comparative Study Between Direct Torque ControlDocument9 pagesA Comparative Study Between Direct Torque Control1032212420No ratings yet
- Time-Domain Modelling of Turbo-Compressors in Direct Injection Diesel EnginesDocument13 pagesTime-Domain Modelling of Turbo-Compressors in Direct Injection Diesel Enginesjossy2No ratings yet
- Harmonic Analysis and THD Calculation of Trapezoidal PWM Technique by FFT ToolsDocument3 pagesHarmonic Analysis and THD Calculation of Trapezoidal PWM Technique by FFT ToolsInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Energies 08 10335Document19 pagesEnergies 08 10335Ahmet GündoğduNo ratings yet
- Optimal Vector Control ofDocument7 pagesOptimal Vector Control ofVinay KumarNo ratings yet
- 2002 12 6 Phase MotorDocument8 pages2002 12 6 Phase MotorDrazan GalusicNo ratings yet
- 3-D Analytical Model of Axial-Flux Permanent MagneDocument14 pages3-D Analytical Model of Axial-Flux Permanent MagnesarbiniNo ratings yet
- Field Oriented Control of Permanent Magnet Synchronous Motor Using Predictive Space Vector ModulationDocument7 pagesField Oriented Control of Permanent Magnet Synchronous Motor Using Predictive Space Vector ModulationKiki RamadhanNo ratings yet
- Nakayama 2019Document11 pagesNakayama 2019Harsh PatilNo ratings yet
- IEEE 3002 by AkshayDocument24 pagesIEEE 3002 by AkshayShishpal Singh NegiNo ratings yet
- Design Procedure of A Line-Start Permanent Magnet Synchronous MachineDocument9 pagesDesign Procedure of A Line-Start Permanent Magnet Synchronous MachineQuang HoàngNo ratings yet
- Simulink Implementation of Wind Farm Model For Use in Power System StudiesDocument5 pagesSimulink Implementation of Wind Farm Model For Use in Power System Studiestatacps0% (1)
- Automated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesDocument11 pagesAutomated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesViệt Anh PhạmNo ratings yet
- A High Efficiency Control Strategy For Synchronous Reluctance Generator Including SaturationDocument7 pagesA High Efficiency Control Strategy For Synchronous Reluctance Generator Including SaturationDAVID SANTOS MARTINNo ratings yet
- Research ArticleDocument15 pagesResearch Articlejunaid ikramNo ratings yet
- Maximum Torque Per Ampere Control of Interior Permanent Magnet Synchronous Motor Via Optimal Current ExcitationDocument7 pagesMaximum Torque Per Ampere Control of Interior Permanent Magnet Synchronous Motor Via Optimal Current ExcitationThiện HàNo ratings yet
- Permanent Magnet Synchronous Motor ThesisDocument4 pagesPermanent Magnet Synchronous Motor Thesisubkciwwff100% (2)
- BVaraticeanu RRST 1 2016 PP 3-7Document6 pagesBVaraticeanu RRST 1 2016 PP 3-7M. T.No ratings yet
- Force Ripple Compensation of Linear Synchronous Motors: Christof RöhrigDocument13 pagesForce Ripple Compensation of Linear Synchronous Motors: Christof RöhrigAri SetyawanNo ratings yet
- Design of A High Efficiency Class F Power Amplifier With Large S - 2020 - MeasurDocument8 pagesDesign of A High Efficiency Class F Power Amplifier With Large S - 2020 - MeasurPedro Tavares MurakameNo ratings yet
- 2015 - Four Quadrant Torque Ripple Minimization of SRM Through Current Profiling With Mitigation of Rotor Eccentricity Problem and Sensor ErrorsDocument8 pages2015 - Four Quadrant Torque Ripple Minimization of SRM Through Current Profiling With Mitigation of Rotor Eccentricity Problem and Sensor ErrorsMarcelo Vinicius de PaulaNo ratings yet
- Sensors 20 02406 v2Document11 pagesSensors 20 02406 v2Krishna KumarNo ratings yet
- Simple Converter Structure For Fault Tolerant MotorsDocument6 pagesSimple Converter Structure For Fault Tolerant Motorsarnika33No ratings yet
- Characteristic and Selection ofDocument62 pagesCharacteristic and Selection ofMolo DembéléNo ratings yet
- VFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. MishraDocument6 pagesVFT Study For EHV-GIS Substation: Amit Kumar and Mahesh K. Mishraarunw110No ratings yet
- Harmonic Analysis Procedures: A Comparison Between IEEE and IEC GuidelinesDocument6 pagesHarmonic Analysis Procedures: A Comparison Between IEEE and IEC GuidelinesJose Luis Arellano CamachoNo ratings yet
- High-Frequency Modeling For Cable and Induction Motor Overvoltage Studies in Long Cable DrivesDocument10 pagesHigh-Frequency Modeling For Cable and Induction Motor Overvoltage Studies in Long Cable DrivesRodrigo AndradeNo ratings yet
- Comprehensive High Speed Automotive SM-PMSM Torque Control StabilityDocument11 pagesComprehensive High Speed Automotive SM-PMSM Torque Control StabilityTrần Sách HoanNo ratings yet
- 1 PBDocument12 pages1 PBJosé Francisco Gallardo OjedaNo ratings yet
- A Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497Document7 pagesA Method For Constructing Reduced Order Transformer Models For System Studies From Detailed Lumped Parameter Models Ml12088a497cristian1961No ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Fault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorDocument12 pagesFault Tolerant Control With Torque Limitation Based On Fault Mode For Ten Phase Permanent Magnet Synchronous MotorAbir HezziNo ratings yet
- Modelling Short-And Open-Circuit Faults in Permanent Magnet Synchronous Machines Using ModelicaDocument7 pagesModelling Short-And Open-Circuit Faults in Permanent Magnet Synchronous Machines Using ModelicaAbir HezziNo ratings yet
- Open-Circuit Fault-Tolerant Control of Five-Phase PM Machine Based On Reconfiguring Maximum Round Magnetomotive ForceDocument11 pagesOpen-Circuit Fault-Tolerant Control of Five-Phase PM Machine Based On Reconfiguring Maximum Round Magnetomotive ForceAbir HezziNo ratings yet
- Yiguang 2018Document6 pagesYiguang 2018Abir HezziNo ratings yet
- Open-Phase Fault Tolerance Techniques of Five-Phase Dual-Rotor Permanent Magnet Synchronous MotorDocument29 pagesOpen-Phase Fault Tolerance Techniques of Five-Phase Dual-Rotor Permanent Magnet Synchronous MotorAbir HezziNo ratings yet
- Electric Power Systems Research: SciencedirectDocument7 pagesElectric Power Systems Research: SciencedirectAbir HezziNo ratings yet
- Energies: Robust Speed Control of PMSM Using Sliding Mode Control (SMC) - A ReviewDocument27 pagesEnergies: Robust Speed Control of PMSM Using Sliding Mode Control (SMC) - A ReviewAbir HezziNo ratings yet
- Defiant RPG - GM Guide (Electronic Version) XDocument9 pagesDefiant RPG - GM Guide (Electronic Version) XXosé Lois PérezNo ratings yet
- Plants and Animals Live Together Lesson PlanDocument3 pagesPlants and Animals Live Together Lesson Planapi-374921894No ratings yet
- 2023 AWS Partner Funding Benefits Program Guide - EnglishDocument35 pages2023 AWS Partner Funding Benefits Program Guide - EnglishVictor Villacorta ElliottNo ratings yet
- Shadow Presentation Photography IdeasDocument28 pagesShadow Presentation Photography IdeasagharizwanaliNo ratings yet
- Software License Certificate: 2018-03-26 102314 HUB Qflc-Ohrx-Kqw Z-QNXB - Oa Jj-Xasb-QywkDocument2 pagesSoftware License Certificate: 2018-03-26 102314 HUB Qflc-Ohrx-Kqw Z-QNXB - Oa Jj-Xasb-QywkJuan LamasNo ratings yet
- NSTP Lesson 1Document4 pagesNSTP Lesson 1LACANARIA, ELLE BEA N.No ratings yet
- Stat 116Document7 pagesStat 116oguzdagciNo ratings yet
- Source and Method Data CollectionDocument76 pagesSource and Method Data CollectionChuchu ChuchaNo ratings yet
- PragmaticsDocument10 pagesPragmaticsDisya RusmadinantiNo ratings yet
- What Would Humans Do in A World of super-AI TEchnologyDocument9 pagesWhat Would Humans Do in A World of super-AI TEchnologyRahmati RahmatullahNo ratings yet
- Diff AmpDocument54 pagesDiff AmpUday GulghaneNo ratings yet
- Employee Uniform Agreement Sample Template 092321 3Document3 pagesEmployee Uniform Agreement Sample Template 092321 3zenithcrew.financeNo ratings yet
- A Master Forms Residential IndexDocument70 pagesA Master Forms Residential IndexAlberta Real EstateNo ratings yet
- Subarachnoid Haemorrhage:Pathology, Clinical Features and ManagementDocument48 pagesSubarachnoid Haemorrhage:Pathology, Clinical Features and Managementesene1100% (1)
- Duplichecker-Plagiarism-Bab (2,3)Document2 pagesDuplichecker-Plagiarism-Bab (2,3)Sarah MaharaniNo ratings yet
- Free Iptv Ex - Yu Streams 11.07.14Document51 pagesFree Iptv Ex - Yu Streams 11.07.14bajra123No ratings yet
- Credit Note MH2202104 AA28787Document1 pageCredit Note MH2202104 AA28787Martin NadarNo ratings yet
- Electrical Engineering Software PDFDocument12 pagesElectrical Engineering Software PDFAkd Deshmukh50% (2)
- Abubakar 2014Document13 pagesAbubakar 2014tommy maulanaNo ratings yet
- TAB Installation Instruction v1.1Document15 pagesTAB Installation Instruction v1.1vignesh. viswanathanNo ratings yet
- Didactic ProductHighlights 2020 v2.6Document20 pagesDidactic ProductHighlights 2020 v2.6agus prasetioNo ratings yet
- Bastion Quickstart enDocument29 pagesBastion Quickstart enHalil DemirNo ratings yet
- Lesson-2-Climate IiDocument30 pagesLesson-2-Climate IiErica NatividadNo ratings yet
- Bridget Wisnewski ResumeDocument2 pagesBridget Wisnewski Resumeapi-425692010No ratings yet
- Cruel SummerDocument18 pagesCruel SummerLeanne Mae PatugaNo ratings yet
- Clinical Pharmacology ReviewerDocument12 pagesClinical Pharmacology ReviewerSister RislyNo ratings yet
- Lavon 2004Document7 pagesLavon 2004Tazkiyatul Asma'iNo ratings yet