Download as pdf or txt
You might also like
- Optimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryFrom EverandOptimum Array Processing: Part IV of Detection, Estimation, and Modulation TheoryNo ratings yet
- CHP4-MICROWAVE FILTERS - WithexamplesDocument71 pagesCHP4-MICROWAVE FILTERS - WithexamplesAnonymous VoetONtGnNo ratings yet
- BJT - JFET Frequency ResponseDocument39 pagesBJT - JFET Frequency ResponseGem Raymund CastroNo ratings yet
- 07a51101 Digital Signal ProcessingDocument8 pages07a51101 Digital Signal ProcessingSRINIVASA RAO GANTANo ratings yet
- Lecture 5-Capacitance of Transmission LinesDocument51 pagesLecture 5-Capacitance of Transmission Lineskk1107974No ratings yet
- Analysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorDocument10 pagesAnalysis and Design of A Low-Voltage Low-Power Double-Tail ComparatorSrinivasAnchalaNo ratings yet
- Basic SOA Circuit Limiter AnalysisDocument16 pagesBasic SOA Circuit Limiter AnalysisGuillermo Maldonado PájaroNo ratings yet
- r05320201 Digital Signal ProcessingDocument8 pagesr05320201 Digital Signal ProcessingSRINIVASA RAO GANTANo ratings yet
- Capital BudgetingDocument60 pagesCapital BudgetingAce DesabilleNo ratings yet
- Fast Fourier TransformDocument62 pagesFast Fourier TransformAlina RazaNo ratings yet
- R.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question BankDocument6 pagesR.M.D Engineering College (An Autonomous Institution) Ec8391 - Control System Engineering Question Bankaarthir88No ratings yet
- Microwave 10Document40 pagesMicrowave 10Kubilay ÖzdemirNo ratings yet
- Electronic Circuit AnalysisDocument8 pagesElectronic Circuit AnalysisSatish SmartNo ratings yet
- AEC QuestionsDocument4 pagesAEC QuestionsVinay MadhavNo ratings yet
- EDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFDocument41 pagesEDICONChina2019 - (87) - Vye, David - Designing A Narrowband 28-GHz Bandpass Filter For 5G Applications PDFkhyatichavdaNo ratings yet
- OscillatorsDocument45 pagesOscillatorsAshner NovillaNo ratings yet
- Microwave Active Circuit Design: 黃凡修 Fan-Hsiu Huang fshuang@mail.cgu.edu.twDocument36 pagesMicrowave Active Circuit Design: 黃凡修 Fan-Hsiu Huang fshuang@mail.cgu.edu.twMinh VuNo ratings yet
- Arithmetic For EngineersDocument530 pagesArithmetic For EngineersEspiritu Jara100% (1)
- Microwave 03Document36 pagesMicrowave 03Cindrella MotlammeNo ratings yet
- PL301 Submersible Level Transmitter PDFDocument2 pagesPL301 Submersible Level Transmitter PDFAdil100% (1)
- Digital Filter Design For Classifying Coconut Ages Using Blackman FIRDocument7 pagesDigital Filter Design For Classifying Coconut Ages Using Blackman FIRdiana rahmawatiNo ratings yet
- Electronics Circuit AnalysisDocument8 pagesElectronics Circuit AnalysisrpramkmrNo ratings yet
- Chapter 02 Basic Concepts in RF DesignDocument110 pagesChapter 02 Basic Concepts in RF DesignBilal HabibNo ratings yet
- Lecture 524 12 SIWDocument20 pagesLecture 524 12 SIWKateXX7No ratings yet
- AN 01eDocument3 pagesAN 01eluisNo ratings yet
- Optical Transceiver Testing Using Map Application Notes enDocument6 pagesOptical Transceiver Testing Using Map Application Notes engwNo ratings yet
- High Speed Vlsi DesignDocument93 pagesHigh Speed Vlsi DesignDr Narayana Swamy RamaiahNo ratings yet
- Effect of Sigma Delta Modulator On The Phase Noise of PLL2Document12 pagesEffect of Sigma Delta Modulator On The Phase Noise of PLL2Hossein Rahmanian KooshkakiNo ratings yet
- Lab - State SpaceDocument15 pagesLab - State SpaceSohaib Sajid100% (1)
- Phase Shifter TutorialDocument12 pagesPhase Shifter TutorialsukusportyNo ratings yet
- Microwave Network AnalysisDocument13 pagesMicrowave Network AnalysisGrant HeilemanNo ratings yet
- Microwave FiltersDocument20 pagesMicrowave FiltersDiptiman BiswasNo ratings yet
- Control Theory Quiz 1Document5 pagesControl Theory Quiz 1Sundas Khalid100% (1)
- Chapter 4 - Microwave AmplifierDocument48 pagesChapter 4 - Microwave AmplifierVăn Phú HảiNo ratings yet
- Robot Vacuum Cleaner: Joel Bergman and Jonas LindDocument70 pagesRobot Vacuum Cleaner: Joel Bergman and Jonas LindMít Tơ TươiNo ratings yet
- Solution A3 NPTEL Control Engg Jan April 2020Document12 pagesSolution A3 NPTEL Control Engg Jan April 2020Akhil Nameirakpam100% (1)
- Lab0: Introduction To Ltspice For Electronics - I: by Naeem Maroof Venue: Electronics Lab Ee Department, Ciit IslamabadDocument47 pagesLab0: Introduction To Ltspice For Electronics - I: by Naeem Maroof Venue: Electronics Lab Ee Department, Ciit IslamabadRabia BasharatNo ratings yet
- SIW Application in MicrowaveDocument29 pagesSIW Application in MicrowavedurgaNo ratings yet
- Substrate Integrated Waveguide (SIW) Techniques: The State-of-the-Art Developments and Future TrendsDocument23 pagesSubstrate Integrated Waveguide (SIW) Techniques: The State-of-the-Art Developments and Future TrendsclanonNo ratings yet
- Omnidirectional Quadruped Robot Multidirektionell Fyrbent RobotDocument59 pagesOmnidirectional Quadruped Robot Multidirektionell Fyrbent RobotB.M.S ChamsaNo ratings yet
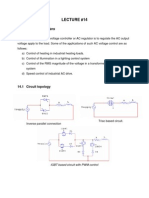
- Lecture #14: AC Voltage ControllersDocument14 pagesLecture #14: AC Voltage ControllersMat SahNo ratings yet
- Power Amplifier PDFDocument26 pagesPower Amplifier PDFNabeel KarvinkarNo ratings yet
- RF Field Strength Meter CircuitDocument5 pagesRF Field Strength Meter CircuitMark Mccrea100% (1)
- Unit 5 - MICROWAVE DESIGNDocument181 pagesUnit 5 - MICROWAVE DESIGNVanitha RNo ratings yet
- Intensity ModulationDocument3 pagesIntensity Modulationanon-323096100% (1)
- Semiconductor Optical AmplifierDocument10 pagesSemiconductor Optical Amplifierapi-26832469No ratings yet
- Hewlett-Packard - AN150-10 - Spectrum Analysis - Field Strenght MeasurementDocument2 pagesHewlett-Packard - AN150-10 - Spectrum Analysis - Field Strenght Measurementgbr123No ratings yet
- Microwave Filters-1965Document20 pagesMicrowave Filters-1965alokcena007No ratings yet
- Miniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDocument4 pagesMiniaturized 90 Degree Hybrid Coupler Using High Dielectric Substrate For QPSK Modulator PDFDenis CarlosNo ratings yet
- 03-Amplifiers (Mode de Compatibilité)Document51 pages03-Amplifiers (Mode de Compatibilité)benfatahNo ratings yet
- A Broadband Planar Magic-T Using Microstrip-Slotline TransitionsDocument6 pagesA Broadband Planar Magic-T Using Microstrip-Slotline TransitionsSarvesh HireNo ratings yet
- Rectangular To Circular Waveguide TransitionsDocument2 pagesRectangular To Circular Waveguide TransitionsAntonio P. Souza JuniorNo ratings yet
- Digital PLLDocument6 pagesDigital PLLPeter Podhoranský100% (1)
- Chopper Controlled DC DrivesDocument1 pageChopper Controlled DC Drives852963No ratings yet
- Slot Antenna: Prepared By: Cyrus John C. SarientaasDocument9 pagesSlot Antenna: Prepared By: Cyrus John C. SarientaasMarcos Marcelon Alcantara Abueva IIINo ratings yet
- Design Techniques For Low Noise Cmos Operational AmplifiersDocument4 pagesDesign Techniques For Low Noise Cmos Operational AmplifiersChandra Praveen MahalingamNo ratings yet
- High Efficiency RF and Microwave Solid State Power AmplifiersFrom EverandHigh Efficiency RF and Microwave Solid State Power AmplifiersRating: 3 out of 5 stars3/5 (2)
- Analysis and Optimal Design of Microstrip Sensors: P.W. WebbDocument9 pagesAnalysis and Optimal Design of Microstrip Sensors: P.W. WebbRavindra KumarNo ratings yet
- RFID Coverage Extension Using Microstrip-Patch Antenna ArrayDocument7 pagesRFID Coverage Extension Using Microstrip-Patch Antenna ArrayRavindra KumarNo ratings yet
- Radiation Damage Studies of Silicon Microstrip Sensors: B. Stugu4, R. Takashima', K. Tanizaki', S - Terada2, Y. Unno2Document7 pagesRadiation Damage Studies of Silicon Microstrip Sensors: B. Stugu4, R. Takashima', K. Tanizaki', S - Terada2, Y. Unno2Ravindra KumarNo ratings yet
- DIGITAL CIRCUIT AND SYSTEM Mid Term-IIDocument1 pageDIGITAL CIRCUIT AND SYSTEM Mid Term-IIRavindra KumarNo ratings yet
- These Are The Opening Words of The Preamble To The Indian ConstitutionDocument32 pagesThese Are The Opening Words of The Preamble To The Indian ConstitutionRavindra KumarNo ratings yet
- Solved ProblemsDocument10 pagesSolved ProblemsRavindra KumarNo ratings yet
- Frequency BandsDocument4 pagesFrequency BandsRavindra KumarNo ratings yet
- DIGITAL CIRCUIT AND SYSTEM 1st TermDocument1 pageDIGITAL CIRCUIT AND SYSTEM 1st TermRavindra KumarNo ratings yet
- DIGITAL CIRCUIT AND SYSTEM Mid Term-IDocument1 pageDIGITAL CIRCUIT AND SYSTEM Mid Term-IRavindra KumarNo ratings yet
- DIGITAL CIRCUIT AND SYSTEM End TermDocument2 pagesDIGITAL CIRCUIT AND SYSTEM End TermRavindra KumarNo ratings yet
- Classes 6 To 8 Half Yearly Examination (2018-19) DatesheetDocument1 pageClasses 6 To 8 Half Yearly Examination (2018-19) DatesheetRavindra KumarNo ratings yet
- DIGITAL CIRCUIT AND SYSTEM Mid TermDocument1 pageDIGITAL CIRCUIT AND SYSTEM Mid TermRavindra KumarNo ratings yet
- Electronics and Communication Department The Lnmiit, Jaipur Digital Circuits and Systems (Code: DCS)Document4 pagesElectronics and Communication Department The Lnmiit, Jaipur Digital Circuits and Systems (Code: DCS)Ravindra KumarNo ratings yet
- Rapid Firing Scheme For Ultrasonic Sensors Used in Mobile RobotsDocument10 pagesRapid Firing Scheme For Ultrasonic Sensors Used in Mobile RobotsRavindra KumarNo ratings yet
- Notes of Unit 5 (EMW)Document5 pagesNotes of Unit 5 (EMW)Ravindra KumarNo ratings yet
- B. Tech.: Hours (Total Marks: 100Document3 pagesB. Tech.: Hours (Total Marks: 100Ravindra KumarNo ratings yet
- A Dual Wideband Bandpass Filter For WLAN and 5G Wi-Fi ApplicationsDocument4 pagesA Dual Wideband Bandpass Filter For WLAN and 5G Wi-Fi Applicationsnassimo nassimoNo ratings yet
- Analysis of Adaptive Equalization Techniques For Burst Digital TransmissionDocument7 pagesAnalysis of Adaptive Equalization Techniques For Burst Digital TransmissionNithima ManiyalaNo ratings yet
- Safety Information: TelevisionDocument92 pagesSafety Information: TelevisionGheorghe GeorgelNo ratings yet
- IR Transmitter and Receiver Circuit DiagramDocument21 pagesIR Transmitter and Receiver Circuit DiagramAndy ZhuNo ratings yet
- East Riding Main Road SaltingDocument1 pageEast Riding Main Road SaltingzacklawsNo ratings yet
- Aperiodic Loop Antenna ArraysDocument36 pagesAperiodic Loop Antenna Arraysbayman66No ratings yet
- LTE FDD 4T6S Solution HuaweiDocument39 pagesLTE FDD 4T6S Solution HuaweihaiderNo ratings yet
- High Performance PD Sensors: FMC - Flexible Magnetic CouplerDocument2 pagesHigh Performance PD Sensors: FMC - Flexible Magnetic CouplerDeepjoNo ratings yet
- SBS-T3 - Product Manual - EXT - v3Document25 pagesSBS-T3 - Product Manual - EXT - v3ManteprisNo ratings yet
- Operating Instructions: SC-HT720 SC-HT692Document37 pagesOperating Instructions: SC-HT720 SC-HT692gurii_caNo ratings yet
- S1 Pro: Multi-Position PA SystemDocument19 pagesS1 Pro: Multi-Position PA SystemuiligNo ratings yet
- Analyzing Space Rapid Response Key Technologies Based On The Data Relay SystemDocument4 pagesAnalyzing Space Rapid Response Key Technologies Based On The Data Relay SystemMano DanoNo ratings yet
- Deck Plan Maintenance System Weekly: 1. Hull & Load LineDocument3 pagesDeck Plan Maintenance System Weekly: 1. Hull & Load LineKacang GorengNo ratings yet
- LPD DasDocument8 pagesLPD DasDieguiten2No ratings yet
- GenesysAerosystems - System 60-2Document2 pagesGenesysAerosystems - System 60-2Alex ProkonovNo ratings yet
- Kmci CyyzDocument7 pagesKmci CyyzmcameraNo ratings yet
- Danny Yoo ThesisDocument108 pagesDanny Yoo ThesisKarthikeyan GunasekaranNo ratings yet
- Downlink and Uplink Physical Channels in Long Term EvolutionDocument11 pagesDownlink and Uplink Physical Channels in Long Term EvolutionAnabel MendesNo ratings yet
- Best Practices For Optimizing Your Signal Generator - Part 1Document8 pagesBest Practices For Optimizing Your Signal Generator - Part 1Marian VerdeNo ratings yet
- BF-CM625s User ManualDocument23 pagesBF-CM625s User ManualPT.tikicom sinergiutamaNo ratings yet
- PBL Project Report TST Final2Document11 pagesPBL Project Report TST Final2KARTIK DEVARDE100% (1)
- FTM-3100R/E: Advance ManualDocument33 pagesFTM-3100R/E: Advance ManualShedaPazNo ratings yet
- Pulse Code ModulationDocument3 pagesPulse Code ModulationWendell Miles De ArmasNo ratings yet
- Jipmer 2018 Solved PaperDocument33 pagesJipmer 2018 Solved PaperSanjana Naidu100% (1)
- Chapter TwoDocument10 pagesChapter Twohamza mohsenNo ratings yet
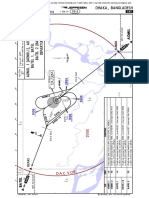
- Vghs/Dac Dhaka, Bangladesh: Hazrat Shahjalal Intl 10-3Document24 pagesVghs/Dac Dhaka, Bangladesh: Hazrat Shahjalal Intl 10-3Tweed3A100% (1)
- 2018-22 R18 ECE Co-Po MappingDocument106 pages2018-22 R18 ECE Co-Po Mapping51-Naman JainNo ratings yet
- Auditor R4280-Specification SheetDocument1 pageAuditor R4280-Specification SheetAbdul RahmanNo ratings yet
- GBPPR 'Zine - Issue #58Document54 pagesGBPPR 'Zine - Issue #58GBPPRNo ratings yet
- Chelton Product Catalogue 2021 - European AntennasDocument104 pagesChelton Product Catalogue 2021 - European AntennasRudi SusantoNo ratings yet