Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Datacom v1.0 - Single Choice Questions - Attempt ReviewDocument32 pagesDatacom v1.0 - Single Choice Questions - Attempt Reviewmike kato100% (1)
- Plagiarism Scan Report: Date Exclude URLDocument6 pagesPlagiarism Scan Report: Date Exclude URLlokeshNo ratings yet
- SoC SyllabusDocument2 pagesSoC SyllabuslokeshNo ratings yet
- NoC Based DNN AcceleratorsDocument8 pagesNoC Based DNN AcceleratorslokeshNo ratings yet
- Reliability Optimization Under Severe Uncertainty For Noc Based Architectures Using An Info-Gap Decision ApproachDocument4 pagesReliability Optimization Under Severe Uncertainty For Noc Based Architectures Using An Info-Gap Decision ApproachlokeshNo ratings yet
- Frame Work For DesignexpDocument15 pagesFrame Work For DesignexplokeshNo ratings yet
- Fault TolerantDocument17 pagesFault TolerantlokeshNo ratings yet
- UMTS Signaling Trace and AnalysisDocument38 pagesUMTS Signaling Trace and Analysiskara nacimNo ratings yet
- Versa FlexVNF Datasheet Final 11.5Document3 pagesVersa FlexVNF Datasheet Final 11.5Aathi87No ratings yet
- Flashwave 4100 Es PDFDocument8 pagesFlashwave 4100 Es PDFansisNo ratings yet
- Data Link LayerDocument18 pagesData Link LayerTamanna ShenoyNo ratings yet
- Siaemic - ALFOplus - Leaflet - October 2021Document2 pagesSiaemic - ALFOplus - Leaflet - October 2021Bilal WarraichNo ratings yet
- TR-359 A Framework For VirtualizationDocument28 pagesTR-359 A Framework For Virtualizationwuhao79No ratings yet
- IMS Nodes FunctioningDocument2 pagesIMS Nodes FunctioningAnil HarodNo ratings yet
- CCNA Security - Student Packet Tracer ManualDocument40 pagesCCNA Security - Student Packet Tracer Manualpulsar200450% (4)
- NI LabVIEW For CompactRIO Developer's Guide-59-84Document26 pagesNI LabVIEW For CompactRIO Developer's Guide-59-84MANFREED CARVAJAL PILLIMUENo ratings yet
- EG860 User Guide (V200R003C00 - 15) PDFDocument271 pagesEG860 User Guide (V200R003C00 - 15) PDFRosn MznNo ratings yet
- CCNAv7 Equipment List October 2019Document2 pagesCCNAv7 Equipment List October 2019Jefry Gutiérrez CelisNo ratings yet
- Ulbotech Communication Protocol V1.010 PDFDocument119 pagesUlbotech Communication Protocol V1.010 PDFHtun NayWinNo ratings yet
- Direct Device-to-Device Communication in 5G Networl (S: Senan Ali Abd DR - Manjunath.S.S DR - Sayed AbdulhayanDocument4 pagesDirect Device-to-Device Communication in 5G Networl (S: Senan Ali Abd DR - Manjunath.S.S DR - Sayed AbdulhayanSana AminNo ratings yet
- Radius AttributesDocument31 pagesRadius AttributesMohammed ShakilNo ratings yet
- KNX IP - Using - IP - Networks - As - KNX - MediumDocument12 pagesKNX IP - Using - IP - Networks - As - KNX - MediumMeNo ratings yet
- Gantt-Chart LDocument1 pageGantt-Chart LXcloreNo ratings yet
- Huawei WiFi6Document12 pagesHuawei WiFi6kentmultanNo ratings yet
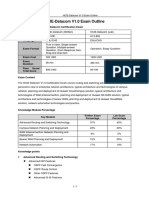
- HCIE-Datacom V1.0 Exam OutlineDocument7 pagesHCIE-Datacom V1.0 Exam Outlineabera alemayehuNo ratings yet
- ReadmeDocument6 pagesReadmedavid del pradoNo ratings yet
- Thesis Report On Black Hole Attack in ManetDocument5 pagesThesis Report On Black Hole Attack in Manetbsgyhhnc100% (1)
- Vision Edge 100 (E100) Network Packet BrokerDocument7 pagesVision Edge 100 (E100) Network Packet BrokerfixthomaslaposteNo ratings yet
- Altai AP Basic Config QSGDocument124 pagesAltai AP Basic Config QSGadesedas2009No ratings yet
- Cisco Data Center Infrastructure 2.5 Design GuideDocument180 pagesCisco Data Center Infrastructure 2.5 Design GuideIsaac Ferreras DominguezNo ratings yet
- V6.4.0 Technical Update: SAN Volume Controller and Storwize V7000Document58 pagesV6.4.0 Technical Update: SAN Volume Controller and Storwize V7000ecorradiNo ratings yet
- Router 6000 SeriesDocument4 pagesRouter 6000 SeriesLionel Marcos Aguilar OlivarezNo ratings yet
- Zigbee TechnologyDocument25 pagesZigbee TechnologyClassic PrintersNo ratings yet
- Fortigate SwitchDocument3 pagesFortigate SwitchneelNo ratings yet
- SonicOS 6.2.5 LogEvents ReferenceGuideDocument58 pagesSonicOS 6.2.5 LogEvents ReferenceGuideMario AlexanderNo ratings yet
- Govt. S.K.S.J. T. Institute: Department of Electronics and Communication Computer Communication NetworksDocument16 pagesGovt. S.K.S.J. T. Institute: Department of Electronics and Communication Computer Communication Networksmadhu shree mNo ratings yet