Download as pdf or txt
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5835)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (852)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (903)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (541)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (350)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (824)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (405)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Z Type Hydraulic Fishing Jars PDFDocument38 pagesZ Type Hydraulic Fishing Jars PDFdjeutcheuNo ratings yet
- IOS Vs AndroidDocument2 pagesIOS Vs AndroidPranav Haran HarichandranNo ratings yet
- Content Life CycleDocument3 pagesContent Life CyclePranav Haran HarichandranNo ratings yet
- Reporting Phase of Digital ForensicsDocument10 pagesReporting Phase of Digital ForensicsPranav Haran HarichandranNo ratings yet
- RST Group AssignmentDocument52 pagesRST Group AssignmentPranav Haran HarichandranNo ratings yet
- Class Test - Marking Scheme Ethical Hacking Answer ALL Questions (Total Marks: 50)Document2 pagesClass Test - Marking Scheme Ethical Hacking Answer ALL Questions (Total Marks: 50)Pranav Haran HarichandranNo ratings yet
- Introduction To CARDIC HospitalDocument30 pagesIntroduction To CARDIC HospitalPranav Haran HarichandranNo ratings yet
- 3 Assignment questions-APU1F1911-ICP-v1-1Document5 pages3 Assignment questions-APU1F1911-ICP-v1-1Pranav Haran HarichandranNo ratings yet
- Algorithms and Data Structure in C DocumentationDocument14 pagesAlgorithms and Data Structure in C DocumentationPranav Haran HarichandranNo ratings yet
- Warframe Excalibur BuildDocument1 pageWarframe Excalibur BuildPranav Haran HarichandranNo ratings yet
- LEcture 14Document15 pagesLEcture 14asdsdNo ratings yet
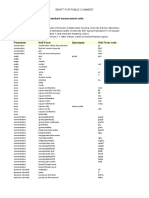
- Multipliers Used To Convert To Standard Measurement Units ReferencesDocument18 pagesMultipliers Used To Convert To Standard Measurement Units Referencesira huttNo ratings yet
- Sec 3 Revision Test A1 A2Document4 pagesSec 3 Revision Test A1 A2Edu 4 UNo ratings yet
- Experiment 9 ShortDocument2 pagesExperiment 9 ShortPeter Hong Leong Cheah100% (3)
- 18GA002-C.Arvind KrishnanDocument40 pages18GA002-C.Arvind KrishnanArvindNo ratings yet
- Introducing Spring Batch SlidesDocument20 pagesIntroducing Spring Batch SlidesKIRAKRATOSNo ratings yet
- 3300 SystemGuides TecHandBook 5.0Document432 pages3300 SystemGuides TecHandBook 5.0GuillaumeBeauchamp100% (1)
- Artromot K3 Knee CPM Service Manual SN Over 10000 PDFDocument17 pagesArtromot K3 Knee CPM Service Manual SN Over 10000 PDFمركز ريلاكس للعلاج الطبيعيNo ratings yet
- Activity #6 SAMPLING DISTRIBUTIONSDocument8 pagesActivity #6 SAMPLING DISTRIBUTIONSleonessa jorban cortes0% (1)
- C# Code ShutdownDocument5 pagesC# Code ShutdownNhạt PhaiNo ratings yet
- CLASS - IX Mathematics (Co-Ordinate Geometry) : Material Downloaded From - 1 / 7Document7 pagesCLASS - IX Mathematics (Co-Ordinate Geometry) : Material Downloaded From - 1 / 7Neerraj YadavNo ratings yet
- TayDocument4 pagesTaycharlesfp1No ratings yet
- PDF Algorithms Illuminated Part 3 Greedy Algorithms and Dynamic Programming 1St Edition Tim Roughgarden Ebook Full ChapterDocument53 pagesPDF Algorithms Illuminated Part 3 Greedy Algorithms and Dynamic Programming 1St Edition Tim Roughgarden Ebook Full Chapterkimberly.hawkins835100% (7)
- Signals and SystemsDocument15 pagesSignals and SystemsAryan VermaNo ratings yet
- FAQ How Do I Register A Hotkey in VBNETDocument3 pagesFAQ How Do I Register A Hotkey in VBNET.adtmmalNo ratings yet
- Metatrader 4 User ManualDocument130 pagesMetatrader 4 User ManualYadhunath SriNo ratings yet
- Computer NetworksDocument623 pagesComputer NetworksjvNo ratings yet
- Go PS 1 Ce 264 MZZQDocument7 pagesGo PS 1 Ce 264 MZZQMarc GoNo ratings yet
- Product Data Sheet Powernics 9701 Black Lead Free: Berger Nippon Paint Automotive Coatings Private LimitedDocument2 pagesProduct Data Sheet Powernics 9701 Black Lead Free: Berger Nippon Paint Automotive Coatings Private LimitedSamNo ratings yet
- Connecting Networks ILMDocument282 pagesConnecting Networks ILMRuy Pequeno CidNo ratings yet
- Reasoning Key Coding Decoding Kanishk@MailDocument8 pagesReasoning Key Coding Decoding Kanishk@MailKainshk Gupta100% (1)
- Lect - 2 - Earthquake - Resistant - Systems - Part 3Document5 pagesLect - 2 - Earthquake - Resistant - Systems - Part 3jana ShmaysemNo ratings yet
- Esmm390 410S182Document2 pagesEsmm390 410S182Mulcue ProfeNo ratings yet
- API 541ti Q&ADocument5 pagesAPI 541ti Q&ATasawwur TahirNo ratings yet
- The Bose 151 SE Environmental SpeakersDocument8 pagesThe Bose 151 SE Environmental SpeakersMihaela PopescuNo ratings yet
- Basic Allied Health Statistics and AnalysisDocument289 pagesBasic Allied Health Statistics and AnalysisAlaa Abu AishehNo ratings yet
- Chloride Corrosion Threshold of Reinforcing Steel in Alkaline Solutions-Open-Circuit Immersion TestsDocument10 pagesChloride Corrosion Threshold of Reinforcing Steel in Alkaline Solutions-Open-Circuit Immersion TestsshameekaNo ratings yet
- USB Personal Healthcare Device Class Definition 1.0Document33 pagesUSB Personal Healthcare Device Class Definition 1.0Tizio IncognitoNo ratings yet
- (Auditing and Accounting Studies) Kristina Yankova (Auth.)-The Influence of Information Order Effects and Trait Professional Skepticism on Auditors’ Belief Revisions_ a Theoretical and Empirical AnalyDocument321 pages(Auditing and Accounting Studies) Kristina Yankova (Auth.)-The Influence of Information Order Effects and Trait Professional Skepticism on Auditors’ Belief Revisions_ a Theoretical and Empirical AnalyYahya Chiguer100% (1)