
Vari-Pak: Cycling DC Motor Control
Vari-Pak: Cycling DC Motor Control
You might also like
- Skoda Fabia Electric RepairDocument152 pagesSkoda Fabia Electric RepairCentaguroDanNo ratings yet
- Kohler RRT ManualDocument40 pagesKohler RRT Manualjmh488100% (1)
- BC138-139 User ManualDocument16 pagesBC138-139 User ManuallalociscoNo ratings yet
- Service Manual Rad Series Index Drives MODELS 663RAD, 900RAD, & 1200RADDocument21 pagesService Manual Rad Series Index Drives MODELS 663RAD, 900RAD, & 1200RADSuhas KODRENo ratings yet
- MANUAL Yaskawa A1000 Manual PDFDocument544 pagesMANUAL Yaskawa A1000 Manual PDFCarlos Chavez Torres83% (6)
- Berges Acm STDDocument64 pagesBerges Acm STDAdan Solano50% (4)
- General Electric SX Z1-2 (Ingles 01-1999) PDFDocument74 pagesGeneral Electric SX Z1-2 (Ingles 01-1999) PDFJuan Carlos Rubio FrescoNo ratings yet
- Pns Construction MATERIALSDocument2 pagesPns Construction MATERIALSjella218100% (1)
- Electronics Lab ReportDocument7 pagesElectronics Lab ReportMr_asad_20No ratings yet
- Lab Report FinalDocument7 pagesLab Report FinalJohnCarloTigueNo ratings yet
- 502 Maqnual PDFDocument18 pages502 Maqnual PDFmantenimiento74No ratings yet
- VFD Operating Instructions (KBAC-24D)Document17 pagesVFD Operating Instructions (KBAC-24D)Chris GagnéNo ratings yet
- KBPC-225: Installation and Operating InstructionsDocument17 pagesKBPC-225: Installation and Operating InstructionsDiego MontanezNo ratings yet
- KB Electronics KBPC 240d Manual de UsuarioDocument21 pagesKB Electronics KBPC 240d Manual de UsuarioAndrés Gregorio de las Heras YanzonNo ratings yet
- KBPC DC Drive Series ManualDocument19 pagesKBPC DC Drive Series ManualKBElectronicsincNo ratings yet
- KBRG 212d Thruhole ManualDocument17 pagesKBRG 212d Thruhole ManualJulio FerminNo ratings yet
- Instructions: Varispeed-616G3Document46 pagesInstructions: Varispeed-616G3teknisiinverterpkNo ratings yet
- sc9000 PDFDocument128 pagessc9000 PDFmrepol02665No ratings yet
- DC Motor Speed Control BC201Document24 pagesDC Motor Speed Control BC201ROSEMARIO PORFIRIONo ratings yet
- Installation and Operation Manual: SCR DC Motor ControlDocument32 pagesInstallation and Operation Manual: SCR DC Motor ControlAndres GarcíaNo ratings yet
- TOA-S616-6.5B VS-616 G3 LN Instructions PDFDocument46 pagesTOA-S616-6.5B VS-616 G3 LN Instructions PDFPop-Coman SimionNo ratings yet
- YASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideDocument70 pagesYASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideJosé María Rodríguez RiveraNo ratings yet
- Om - S70 Metric - 11 - 2014Document30 pagesOm - S70 Metric - 11 - 2014TucumánElectricidadIndustrialNo ratings yet
- KBWM DC Drive Series ManualDocument9 pagesKBWM DC Drive Series ManualKBElectronicsincNo ratings yet
- KBMM DC Drive Series ManualDocument32 pagesKBMM DC Drive Series ManualKBElectronicsincNo ratings yet
- KBMM SMT Manual PDFDocument32 pagesKBMM SMT Manual PDFRicardo Garcia FuentesNo ratings yet
- 2080 Um001 - en e PDFDocument80 pages2080 Um001 - en e PDFAlaa RamadanNo ratings yet
- KBAC AC Drive Series ManualDocument28 pagesKBAC AC Drive Series ManualKBElectronicsincNo ratings yet
- Ac Tech SCL SCM Drives Installation Operation ManualDocument52 pagesAc Tech SCL SCM Drives Installation Operation ManualSkite ClubNo ratings yet
- GXT2-6000RT230 & GXT2-4500RT230: Ower VailabilityDocument40 pagesGXT2-6000RT230 & GXT2-4500RT230: Ower Vailabilityabel ciezaNo ratings yet
- Soft Starter User's Manual ZJR2 Series: Enter PRGDocument20 pagesSoft Starter User's Manual ZJR2 Series: Enter PRGMarco Homero Vázquez SaldañaNo ratings yet
- Sens q1 ManualDocument44 pagesSens q1 Manualmarceloleon4No ratings yet
- General Electric SX MB1 TECH (Ingles 09-2004) PDFDocument77 pagesGeneral Electric SX MB1 TECH (Ingles 09-2004) PDFJuan Carlos Rubio FrescoNo ratings yet
- Bodine AC Chassis Speed Control User Manual Lit 07401080DDocument44 pagesBodine AC Chassis Speed Control User Manual Lit 07401080DWinston diaz valeraNo ratings yet
- CL1 Tech PDFDocument74 pagesCL1 Tech PDFIqbal MakhdoomNo ratings yet
- Yaskawa Manuals 285Document518 pagesYaskawa Manuals 285supermannonNo ratings yet
- S801 D Inside The Delta Soft StarterDocument88 pagesS801 D Inside The Delta Soft Starterdiaphil89No ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualBruno BayardNo ratings yet
- 150 Um011 - en PDocument306 pages150 Um011 - en PaldocristianNo ratings yet
- S801 User ManualDocument92 pagesS801 User ManualjacmgmorganNo ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualTahar BenacherineNo ratings yet
- AC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40Document26 pagesAC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40sufyan786pkNo ratings yet
- Motor Master 20000 SeriesDocument56 pagesMotor Master 20000 SeriesArnulfo Lavares100% (1)
- Auma MaticDocument36 pagesAuma MaticJosip BiscanNo ratings yet
- A1000 Technical Manual CIMR-AxxADocument619 pagesA1000 Technical Manual CIMR-AxxAelectrosysro8560No ratings yet
- Electrical SystemDocument171 pagesElectrical SystemDroul FredNo ratings yet
- M2600 ManaulDocument32 pagesM2600 ManaulSujith Panikkadan unnikrishnanNo ratings yet
- An-2121 Solarmagic™ Sm3320-Batt-Ev Charge Controller Reference DesignDocument21 pagesAn-2121 Solarmagic™ Sm3320-Batt-Ev Charge Controller Reference DesignM. T.No ratings yet
- SCL/SCM Series: Installation and Operation ManualDocument52 pagesSCL/SCM Series: Installation and Operation ManualAntonio MarcosNo ratings yet
- TLE8208Document41 pagesTLE8208Luis VilchezNo ratings yet
- KBMA AC Drive Series ManualDocument24 pagesKBMA AC Drive Series ManualKBElectronicsincNo ratings yet
- Liebert PSI: User Manual-1000/1500/2200/3000, 120VACDocument28 pagesLiebert PSI: User Manual-1000/1500/2200/3000, 120VACrodolfo barrientos mNo ratings yet
- Ge R3R404P2 P3Document62 pagesGe R3R404P2 P3Pablo FriasNo ratings yet
- SCL/SCM Series: Installation and Operation ManualDocument60 pagesSCL/SCM Series: Installation and Operation ManualAntwan MartzNo ratings yet
- SOFTSTARTERDocument96 pagesSOFTSTARTERwilfredoNo ratings yet
- i2000SR IM: Service Manual For The i2000SR Interface ModuleDocument212 pagesi2000SR IM: Service Manual For The i2000SR Interface ModuleALEJANDRONo ratings yet
- D4B802B7E7F Electrical SystemDocument193 pagesD4B802B7E7F Electrical SystemConstantin RascanuNo ratings yet
- i2000SR IM: Service Manual For The i2000SR Interface ModuleDocument212 pagesi2000SR IM: Service Manual For The i2000SR Interface Modulewant807No ratings yet
- Kohler RXT Transfer Switch InstallDocument60 pagesKohler RXT Transfer Switch Installginger1951100% (2)
- IT S811 Soft Starter - User ManualDocument144 pagesIT S811 Soft Starter - User Manualttauanec100% (1)
- Power Electronics Design: A Practitioner's GuideFrom EverandPower Electronics Design: A Practitioner's GuideRating: 4.5 out of 5 stars4.5/5 (3)
- ULS-80 Robot Load Limiter Series: How To Order: Loading InformationDocument7 pagesULS-80 Robot Load Limiter Series: How To Order: Loading InformationSuhas KODRENo ratings yet
- Camtronics CT6000 SeriesDocument8 pagesCamtronics CT6000 SeriesSuhas KODRENo ratings yet
- Robot Load Limiters 1Document1 pageRobot Load Limiters 1Suhas KODRENo ratings yet
- Ferguson IM-pAC E-UKDocument2 pagesFerguson IM-pAC E-UKSuhas KODRENo ratings yet
- Overload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleDocument4 pagesOverload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleSuhas KODRENo ratings yet
- Service Manual Heavy-Duty E-Series Index Drives Models 950E, 1150E, 1550E, 2050EDocument27 pagesService Manual Heavy-Duty E-Series Index Drives Models 950E, 1150E, 1550E, 2050ESuhas KODRENo ratings yet
- Service Manual Rgd/Rgs Series Index Drives Models 350RGD/RGS, 500RGD/RGS & 600RGD/RGSDocument16 pagesService Manual Rgd/Rgs Series Index Drives Models 350RGD/RGS, 500RGD/RGS & 600RGD/RGSSuhas KODRENo ratings yet
- CAMCO R200-R250-Reducer ManualDocument15 pagesCAMCO R200-R250-Reducer ManualSuhas KODRENo ratings yet
- Camco Ioc Automatic Overload Clutch: Field Installation and SettingDocument4 pagesCamco Ioc Automatic Overload Clutch: Field Installation and SettingSuhas KODRENo ratings yet
- Conveyor Price Guide: 304 SS Surfaces, FDA/Food Grade ApprovedDocument3 pagesConveyor Price Guide: 304 SS Surfaces, FDA/Food Grade ApprovedSuhas KODRENo ratings yet
- Piab Vacuum Conveyors and AccessoriesDocument2 pagesPiab Vacuum Conveyors and AccessoriesSuhas KODRENo ratings yet
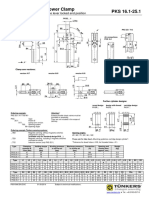
- Mini Pneumatic Power Clamp PKS 16.1-25.1 ZL/ZR: Leigh-Weight Clamp, With Knee Lever Locked End Position and Hand LeverDocument1 pageMini Pneumatic Power Clamp PKS 16.1-25.1 ZL/ZR: Leigh-Weight Clamp, With Knee Lever Locked End Position and Hand LeverSuhas KODRENo ratings yet
- Maxon Motor SpecificationDocument60 pagesMaxon Motor Specificationkuldeepsingh055No ratings yet
- Spac Enq Aex 176 Thank You LetterDocument1 pageSpac Enq Aex 176 Thank You LetterSuhas KODRENo ratings yet
- Conveying BrochureDocument16 pagesConveying BrochureSuhas KODRENo ratings yet
- Application Enquiry / Questionnaire: CustomerDocument3 pagesApplication Enquiry / Questionnaire: CustomerSuhas KODRENo ratings yet
- Mini Pneumatic Power Clamp PKS 16.1-25.1: Lightweight Construction, Knee Lever Locked End PositionDocument1 pageMini Pneumatic Power Clamp PKS 16.1-25.1: Lightweight Construction, Knee Lever Locked End PositionSuhas KODRENo ratings yet
- Mini Clamp PKS 16.1: Spare Parts ListDocument2 pagesMini Clamp PKS 16.1: Spare Parts ListSuhas KODRENo ratings yet
- Aloowable Clamp LoadDocument1 pageAloowable Clamp LoadSuhas KODRENo ratings yet
- Aero-Flex BrochureDocument4 pagesAero-Flex BrochureSuhas KODRENo ratings yet
- P5010 Familiy With AVMDocument3 pagesP5010 Familiy With AVMSuhas KODRENo ratings yet
- Volkmann Weighing Dosing 2016 Final For Web 1Document4 pagesVolkmann Weighing Dosing 2016 Final For Web 1Suhas KODRENo ratings yet
- Dapeng Laser CatalogueDocument13 pagesDapeng Laser CatalogueSuhas KODRENo ratings yet
- X7R Dielectric, 6.3 - 250 VDC (Commercial Grade) : Surface Mount Multilayer Ceramic Chip Capacitors (SMD MLCCS)Document26 pagesX7R Dielectric, 6.3 - 250 VDC (Commercial Grade) : Surface Mount Multilayer Ceramic Chip Capacitors (SMD MLCCS)Alberto GonzalesNo ratings yet
- 23 Avago HCPL 3180Document16 pages23 Avago HCPL 3180Алексей АндрияшNo ratings yet
- Power Electronics Lab Simulation Project ReportDocument5 pagesPower Electronics Lab Simulation Project ReportMaha RaufNo ratings yet
- Electrical EngineeringDocument46 pagesElectrical EngineeringRaja AbbasNo ratings yet
- LC5910S Data Sheet: Critical Current Mode Buck LED Driver ICDocument22 pagesLC5910S Data Sheet: Critical Current Mode Buck LED Driver ICalvaro marcos manuel lopezNo ratings yet
- Service Manual MCD 3000Document54 pagesService Manual MCD 3000Anhell Salvador Loza100% (1)
- NHR Industrial Furnace Temperature ControllerDocument10 pagesNHR Industrial Furnace Temperature ControllerAhmed AliNo ratings yet
- Svcet: Unit - 4 Principles of Circuit BreakersDocument13 pagesSvcet: Unit - 4 Principles of Circuit Breakersparvesh kumarNo ratings yet
- Bicycle LockDocument2 pagesBicycle LockchakralabsNo ratings yet
- Calor Emag Retrofit and ServiceDocument69 pagesCalor Emag Retrofit and ServiceachmadtabaNo ratings yet
- English MCCBDocument81 pagesEnglish MCCBLeed ENNo ratings yet
- Tan Delta PDFDocument4 pagesTan Delta PDFArturo Santivañez Sanchez100% (1)
- Kelvin Connections: The World Leader in High Performance Signal Processing SolutionsDocument8 pagesKelvin Connections: The World Leader in High Performance Signal Processing SolutionsjeremyNo ratings yet
- PhototransistorDocument18 pagesPhototransistorJustin UsanaNo ratings yet
- ABB Isomax Circuit BreakersDocument53 pagesABB Isomax Circuit BreakersAshish GuptaNo ratings yet
- Emergency Board - ConnectionsDocument17 pagesEmergency Board - ConnectionsJehan AICNo ratings yet
- Coils 10 SeriesDocument4 pagesCoils 10 SeriesMr CrossplaneNo ratings yet
- Regenerative Braking System Group 7Document12 pagesRegenerative Braking System Group 7A-16 Sanket GhadageNo ratings yet
- En-Ieb Aen Oe1 1Document52 pagesEn-Ieb Aen Oe1 1Serban MihaelaNo ratings yet
- Data Sheet: Gas Discharge Tubes Telephone InterfaceDocument8 pagesData Sheet: Gas Discharge Tubes Telephone InterfaceandreiNo ratings yet
- A Brief History and Theory Behind Ac, DC and Maglev TrainsDocument7 pagesA Brief History and Theory Behind Ac, DC and Maglev TrainsmuratNo ratings yet
- Telemecanique Type XPS-AF PDFDocument24 pagesTelemecanique Type XPS-AF PDFerikventura19100% (1)
- Isolated and Regulated 5 WATT Modular DC/DC Converters: SeriesDocument3 pagesIsolated and Regulated 5 WATT Modular DC/DC Converters: SeriesDiego SerranoNo ratings yet
- Electrical Power Systems Quality Lecture 2Document43 pagesElectrical Power Systems Quality Lecture 2Carlnagum 123456789No ratings yet
- Thyristor Voltage ControllerDocument7 pagesThyristor Voltage Controllerkavish malakaNo ratings yet
- Heliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDocument4 pagesHeliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDeepan MNo ratings yet
- Sipass Sk5 Security Box: Installation Note InstallationsanvisningDocument6 pagesSipass Sk5 Security Box: Installation Note Installationsanvisningedwar andres restrepoNo ratings yet
















































































































Download as pdf or txt
You might also like
- Skoda Fabia Electric RepairDocument152 pagesSkoda Fabia Electric RepairCentaguroDanNo ratings yet
- Kohler RRT ManualDocument40 pagesKohler RRT Manualjmh488100% (1)
- BC138-139 User ManualDocument16 pagesBC138-139 User ManuallalociscoNo ratings yet
- Service Manual Rad Series Index Drives MODELS 663RAD, 900RAD, & 1200RADDocument21 pagesService Manual Rad Series Index Drives MODELS 663RAD, 900RAD, & 1200RADSuhas KODRENo ratings yet
- MANUAL Yaskawa A1000 Manual PDFDocument544 pagesMANUAL Yaskawa A1000 Manual PDFCarlos Chavez Torres83% (6)
- Berges Acm STDDocument64 pagesBerges Acm STDAdan Solano50% (4)
- General Electric SX Z1-2 (Ingles 01-1999) PDFDocument74 pagesGeneral Electric SX Z1-2 (Ingles 01-1999) PDFJuan Carlos Rubio FrescoNo ratings yet
- Pns Construction MATERIALSDocument2 pagesPns Construction MATERIALSjella218100% (1)
- Electronics Lab ReportDocument7 pagesElectronics Lab ReportMr_asad_20No ratings yet
- Lab Report FinalDocument7 pagesLab Report FinalJohnCarloTigueNo ratings yet
- 502 Maqnual PDFDocument18 pages502 Maqnual PDFmantenimiento74No ratings yet
- VFD Operating Instructions (KBAC-24D)Document17 pagesVFD Operating Instructions (KBAC-24D)Chris GagnéNo ratings yet
- KBPC-225: Installation and Operating InstructionsDocument17 pagesKBPC-225: Installation and Operating InstructionsDiego MontanezNo ratings yet
- KB Electronics KBPC 240d Manual de UsuarioDocument21 pagesKB Electronics KBPC 240d Manual de UsuarioAndrés Gregorio de las Heras YanzonNo ratings yet
- KBPC DC Drive Series ManualDocument19 pagesKBPC DC Drive Series ManualKBElectronicsincNo ratings yet
- KBRG 212d Thruhole ManualDocument17 pagesKBRG 212d Thruhole ManualJulio FerminNo ratings yet
- Instructions: Varispeed-616G3Document46 pagesInstructions: Varispeed-616G3teknisiinverterpkNo ratings yet
- sc9000 PDFDocument128 pagessc9000 PDFmrepol02665No ratings yet
- DC Motor Speed Control BC201Document24 pagesDC Motor Speed Control BC201ROSEMARIO PORFIRIONo ratings yet
- Installation and Operation Manual: SCR DC Motor ControlDocument32 pagesInstallation and Operation Manual: SCR DC Motor ControlAndres GarcíaNo ratings yet
- TOA-S616-6.5B VS-616 G3 LN Instructions PDFDocument46 pagesTOA-S616-6.5B VS-616 G3 LN Instructions PDFPop-Coman SimionNo ratings yet
- YASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideDocument70 pagesYASKAWA AC Drive-A1000: 6-Phase/12-Pulse Input Installation GuideJosé María Rodríguez RiveraNo ratings yet
- Om - S70 Metric - 11 - 2014Document30 pagesOm - S70 Metric - 11 - 2014TucumánElectricidadIndustrialNo ratings yet
- KBWM DC Drive Series ManualDocument9 pagesKBWM DC Drive Series ManualKBElectronicsincNo ratings yet
- KBMM DC Drive Series ManualDocument32 pagesKBMM DC Drive Series ManualKBElectronicsincNo ratings yet
- KBMM SMT Manual PDFDocument32 pagesKBMM SMT Manual PDFRicardo Garcia FuentesNo ratings yet
- 2080 Um001 - en e PDFDocument80 pages2080 Um001 - en e PDFAlaa RamadanNo ratings yet
- KBAC AC Drive Series ManualDocument28 pagesKBAC AC Drive Series ManualKBElectronicsincNo ratings yet
- Ac Tech SCL SCM Drives Installation Operation ManualDocument52 pagesAc Tech SCL SCM Drives Installation Operation ManualSkite ClubNo ratings yet
- GXT2-6000RT230 & GXT2-4500RT230: Ower VailabilityDocument40 pagesGXT2-6000RT230 & GXT2-4500RT230: Ower Vailabilityabel ciezaNo ratings yet
- Soft Starter User's Manual ZJR2 Series: Enter PRGDocument20 pagesSoft Starter User's Manual ZJR2 Series: Enter PRGMarco Homero Vázquez SaldañaNo ratings yet
- Sens q1 ManualDocument44 pagesSens q1 Manualmarceloleon4No ratings yet
- General Electric SX MB1 TECH (Ingles 09-2004) PDFDocument77 pagesGeneral Electric SX MB1 TECH (Ingles 09-2004) PDFJuan Carlos Rubio FrescoNo ratings yet
- Bodine AC Chassis Speed Control User Manual Lit 07401080DDocument44 pagesBodine AC Chassis Speed Control User Manual Lit 07401080DWinston diaz valeraNo ratings yet
- CL1 Tech PDFDocument74 pagesCL1 Tech PDFIqbal MakhdoomNo ratings yet
- Yaskawa Manuals 285Document518 pagesYaskawa Manuals 285supermannonNo ratings yet
- S801 D Inside The Delta Soft StarterDocument88 pagesS801 D Inside The Delta Soft Starterdiaphil89No ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualBruno BayardNo ratings yet
- 150 Um011 - en PDocument306 pages150 Um011 - en PaldocristianNo ratings yet
- S801 User ManualDocument92 pagesS801 User ManualjacmgmorganNo ratings yet
- Separately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualDocument74 pagesSeparately Excited (SX) Transistorized Dual Motor Traction Control and Series Pump Control Installation and Operation ManualTahar BenacherineNo ratings yet
- AC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40Document26 pagesAC 07410827 B Pacesetter Model 2998 Installation Operation Manual NEMA 1 IP 40sufyan786pkNo ratings yet
- Motor Master 20000 SeriesDocument56 pagesMotor Master 20000 SeriesArnulfo Lavares100% (1)
- Auma MaticDocument36 pagesAuma MaticJosip BiscanNo ratings yet
- A1000 Technical Manual CIMR-AxxADocument619 pagesA1000 Technical Manual CIMR-AxxAelectrosysro8560No ratings yet
- Electrical SystemDocument171 pagesElectrical SystemDroul FredNo ratings yet
- M2600 ManaulDocument32 pagesM2600 ManaulSujith Panikkadan unnikrishnanNo ratings yet
- An-2121 Solarmagic™ Sm3320-Batt-Ev Charge Controller Reference DesignDocument21 pagesAn-2121 Solarmagic™ Sm3320-Batt-Ev Charge Controller Reference DesignM. T.No ratings yet
- SCL/SCM Series: Installation and Operation ManualDocument52 pagesSCL/SCM Series: Installation and Operation ManualAntonio MarcosNo ratings yet
- TLE8208Document41 pagesTLE8208Luis VilchezNo ratings yet
- KBMA AC Drive Series ManualDocument24 pagesKBMA AC Drive Series ManualKBElectronicsincNo ratings yet
- Liebert PSI: User Manual-1000/1500/2200/3000, 120VACDocument28 pagesLiebert PSI: User Manual-1000/1500/2200/3000, 120VACrodolfo barrientos mNo ratings yet
- Ge R3R404P2 P3Document62 pagesGe R3R404P2 P3Pablo FriasNo ratings yet
- SCL/SCM Series: Installation and Operation ManualDocument60 pagesSCL/SCM Series: Installation and Operation ManualAntwan MartzNo ratings yet
- SOFTSTARTERDocument96 pagesSOFTSTARTERwilfredoNo ratings yet
- i2000SR IM: Service Manual For The i2000SR Interface ModuleDocument212 pagesi2000SR IM: Service Manual For The i2000SR Interface ModuleALEJANDRONo ratings yet
- D4B802B7E7F Electrical SystemDocument193 pagesD4B802B7E7F Electrical SystemConstantin RascanuNo ratings yet
- i2000SR IM: Service Manual For The i2000SR Interface ModuleDocument212 pagesi2000SR IM: Service Manual For The i2000SR Interface Modulewant807No ratings yet
- Kohler RXT Transfer Switch InstallDocument60 pagesKohler RXT Transfer Switch Installginger1951100% (2)
- IT S811 Soft Starter - User ManualDocument144 pagesIT S811 Soft Starter - User Manualttauanec100% (1)
- Power Electronics Design: A Practitioner's GuideFrom EverandPower Electronics Design: A Practitioner's GuideRating: 4.5 out of 5 stars4.5/5 (3)
- ULS-80 Robot Load Limiter Series: How To Order: Loading InformationDocument7 pagesULS-80 Robot Load Limiter Series: How To Order: Loading InformationSuhas KODRENo ratings yet
- Camtronics CT6000 SeriesDocument8 pagesCamtronics CT6000 SeriesSuhas KODRENo ratings yet
- Robot Load Limiters 1Document1 pageRobot Load Limiters 1Suhas KODRENo ratings yet
- Ferguson IM-pAC E-UKDocument2 pagesFerguson IM-pAC E-UKSuhas KODRENo ratings yet
- Overload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleDocument4 pagesOverload Clutches For Index Drives (Type D-Sa, Adjustable) : Operating PrincipleSuhas KODRENo ratings yet
- Service Manual Heavy-Duty E-Series Index Drives Models 950E, 1150E, 1550E, 2050EDocument27 pagesService Manual Heavy-Duty E-Series Index Drives Models 950E, 1150E, 1550E, 2050ESuhas KODRENo ratings yet
- Service Manual Rgd/Rgs Series Index Drives Models 350RGD/RGS, 500RGD/RGS & 600RGD/RGSDocument16 pagesService Manual Rgd/Rgs Series Index Drives Models 350RGD/RGS, 500RGD/RGS & 600RGD/RGSSuhas KODRENo ratings yet
- CAMCO R200-R250-Reducer ManualDocument15 pagesCAMCO R200-R250-Reducer ManualSuhas KODRENo ratings yet
- Camco Ioc Automatic Overload Clutch: Field Installation and SettingDocument4 pagesCamco Ioc Automatic Overload Clutch: Field Installation and SettingSuhas KODRENo ratings yet
- Conveyor Price Guide: 304 SS Surfaces, FDA/Food Grade ApprovedDocument3 pagesConveyor Price Guide: 304 SS Surfaces, FDA/Food Grade ApprovedSuhas KODRENo ratings yet
- Piab Vacuum Conveyors and AccessoriesDocument2 pagesPiab Vacuum Conveyors and AccessoriesSuhas KODRENo ratings yet
- Mini Pneumatic Power Clamp PKS 16.1-25.1 ZL/ZR: Leigh-Weight Clamp, With Knee Lever Locked End Position and Hand LeverDocument1 pageMini Pneumatic Power Clamp PKS 16.1-25.1 ZL/ZR: Leigh-Weight Clamp, With Knee Lever Locked End Position and Hand LeverSuhas KODRENo ratings yet
- Maxon Motor SpecificationDocument60 pagesMaxon Motor Specificationkuldeepsingh055No ratings yet
- Spac Enq Aex 176 Thank You LetterDocument1 pageSpac Enq Aex 176 Thank You LetterSuhas KODRENo ratings yet
- Conveying BrochureDocument16 pagesConveying BrochureSuhas KODRENo ratings yet
- Application Enquiry / Questionnaire: CustomerDocument3 pagesApplication Enquiry / Questionnaire: CustomerSuhas KODRENo ratings yet
- Mini Pneumatic Power Clamp PKS 16.1-25.1: Lightweight Construction, Knee Lever Locked End PositionDocument1 pageMini Pneumatic Power Clamp PKS 16.1-25.1: Lightweight Construction, Knee Lever Locked End PositionSuhas KODRENo ratings yet
- Mini Clamp PKS 16.1: Spare Parts ListDocument2 pagesMini Clamp PKS 16.1: Spare Parts ListSuhas KODRENo ratings yet
- Aloowable Clamp LoadDocument1 pageAloowable Clamp LoadSuhas KODRENo ratings yet
- Aero-Flex BrochureDocument4 pagesAero-Flex BrochureSuhas KODRENo ratings yet
- P5010 Familiy With AVMDocument3 pagesP5010 Familiy With AVMSuhas KODRENo ratings yet
- Volkmann Weighing Dosing 2016 Final For Web 1Document4 pagesVolkmann Weighing Dosing 2016 Final For Web 1Suhas KODRENo ratings yet
- Dapeng Laser CatalogueDocument13 pagesDapeng Laser CatalogueSuhas KODRENo ratings yet
- X7R Dielectric, 6.3 - 250 VDC (Commercial Grade) : Surface Mount Multilayer Ceramic Chip Capacitors (SMD MLCCS)Document26 pagesX7R Dielectric, 6.3 - 250 VDC (Commercial Grade) : Surface Mount Multilayer Ceramic Chip Capacitors (SMD MLCCS)Alberto GonzalesNo ratings yet
- 23 Avago HCPL 3180Document16 pages23 Avago HCPL 3180Алексей АндрияшNo ratings yet
- Power Electronics Lab Simulation Project ReportDocument5 pagesPower Electronics Lab Simulation Project ReportMaha RaufNo ratings yet
- Electrical EngineeringDocument46 pagesElectrical EngineeringRaja AbbasNo ratings yet
- LC5910S Data Sheet: Critical Current Mode Buck LED Driver ICDocument22 pagesLC5910S Data Sheet: Critical Current Mode Buck LED Driver ICalvaro marcos manuel lopezNo ratings yet
- Service Manual MCD 3000Document54 pagesService Manual MCD 3000Anhell Salvador Loza100% (1)
- NHR Industrial Furnace Temperature ControllerDocument10 pagesNHR Industrial Furnace Temperature ControllerAhmed AliNo ratings yet
- Svcet: Unit - 4 Principles of Circuit BreakersDocument13 pagesSvcet: Unit - 4 Principles of Circuit Breakersparvesh kumarNo ratings yet
- Bicycle LockDocument2 pagesBicycle LockchakralabsNo ratings yet
- Calor Emag Retrofit and ServiceDocument69 pagesCalor Emag Retrofit and ServiceachmadtabaNo ratings yet
- English MCCBDocument81 pagesEnglish MCCBLeed ENNo ratings yet
- Tan Delta PDFDocument4 pagesTan Delta PDFArturo Santivañez Sanchez100% (1)
- Kelvin Connections: The World Leader in High Performance Signal Processing SolutionsDocument8 pagesKelvin Connections: The World Leader in High Performance Signal Processing SolutionsjeremyNo ratings yet
- PhototransistorDocument18 pagesPhototransistorJustin UsanaNo ratings yet
- ABB Isomax Circuit BreakersDocument53 pagesABB Isomax Circuit BreakersAshish GuptaNo ratings yet
- Emergency Board - ConnectionsDocument17 pagesEmergency Board - ConnectionsJehan AICNo ratings yet
- Coils 10 SeriesDocument4 pagesCoils 10 SeriesMr CrossplaneNo ratings yet
- Regenerative Braking System Group 7Document12 pagesRegenerative Braking System Group 7A-16 Sanket GhadageNo ratings yet
- En-Ieb Aen Oe1 1Document52 pagesEn-Ieb Aen Oe1 1Serban MihaelaNo ratings yet
- Data Sheet: Gas Discharge Tubes Telephone InterfaceDocument8 pagesData Sheet: Gas Discharge Tubes Telephone InterfaceandreiNo ratings yet
- A Brief History and Theory Behind Ac, DC and Maglev TrainsDocument7 pagesA Brief History and Theory Behind Ac, DC and Maglev TrainsmuratNo ratings yet
- Telemecanique Type XPS-AF PDFDocument24 pagesTelemecanique Type XPS-AF PDFerikventura19100% (1)
- Isolated and Regulated 5 WATT Modular DC/DC Converters: SeriesDocument3 pagesIsolated and Regulated 5 WATT Modular DC/DC Converters: SeriesDiego SerranoNo ratings yet
- Electrical Power Systems Quality Lecture 2Document43 pagesElectrical Power Systems Quality Lecture 2Carlnagum 123456789No ratings yet
- Thyristor Voltage ControllerDocument7 pagesThyristor Voltage Controllerkavish malakaNo ratings yet
- Heliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDocument4 pagesHeliarc 250 Ac/Dc Power Sources For 230/460/575 VOLT SERVICEDeepan MNo ratings yet
- Sipass Sk5 Security Box: Installation Note InstallationsanvisningDocument6 pagesSipass Sk5 Security Box: Installation Note Installationsanvisningedwar andres restrepoNo ratings yet