
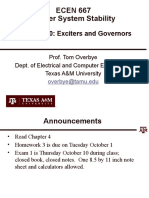
Exciter Turbine Load Modelling
Exciter Turbine Load Modelling
You might also like
- EV1 SCR Motor ControllerDocument32 pagesEV1 SCR Motor ControllerJShearer95% (20)
- Florida International University College of Engineering and Computing Department of Electrical and Computer EngineeringDocument9 pagesFlorida International University College of Engineering and Computing Department of Electrical and Computer EngineeringAneelaMalikNo ratings yet
- Quality Control Handbook Street LightingDocument36 pagesQuality Control Handbook Street LightingbalaafconsNo ratings yet
- Lecture 10 Exciters and GovernorsDocument55 pagesLecture 10 Exciters and GovernorsManuelNo ratings yet
- Experiment FT2: Measurement of Inductance and Mutual InductanceDocument8 pagesExperiment FT2: Measurement of Inductance and Mutual InductanceWong YuZhengNo ratings yet
- Lesson 9Document49 pagesLesson 9write2arshad_mNo ratings yet
- Lesson9 PDFDocument49 pagesLesson9 PDFmfqcNo ratings yet
- Matlab Differential Protection ModelDocument9 pagesMatlab Differential Protection ModelEntertainment MediaNo ratings yet
- Transfer Fundtion of DC GeneratorDocument5 pagesTransfer Fundtion of DC GeneratorMohammad Haris MNo ratings yet
- Oscillators & Applications LongstreetDocument4 pagesOscillators & Applications Longstreetnapoleon_velasc3617No ratings yet
- u 1 L i 1 s k 1 J 1 s T T ωDocument1 pageu 1 L i 1 s k 1 J 1 s T T ωBpp Ikm KuchingNo ratings yet
- PSC Unit-1 NotesDocument82 pagesPSC Unit-1 NotesSunny BNo ratings yet
- Follow The Class Lectures, Must Read The Following Questions, and Also Follow The Previous Year QuestionsDocument5 pagesFollow The Class Lectures, Must Read The Following Questions, and Also Follow The Previous Year QuestionsRehana Karim TomaNo ratings yet
- 02 Physical Systems Modeling-485Document11 pages02 Physical Systems Modeling-485hhNo ratings yet
- Design An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KDocument21 pagesDesign An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KMangaiyarkarasi VengatachalamNo ratings yet
- Analog Circuit EC 405 OscillatorDocument19 pagesAnalog Circuit EC 405 Oscillatoryashrajput7689No ratings yet
- MEB704 - Mechatronics Semester 1 2023: Derrick CampusDocument8 pagesMEB704 - Mechatronics Semester 1 2023: Derrick CampusDanilo BahorNo ratings yet
- Scheme Eee Unit3 QBDocument35 pagesScheme Eee Unit3 QBMaaz S100% (2)
- ComplDyn Simplex OEODocument5 pagesComplDyn Simplex OEORené Mboyo KouayepNo ratings yet
- Indoor Relay SettingDocument20 pagesIndoor Relay SettingxoxisbroNo ratings yet
- A Compact Single-Phase Bidirectional Buck-Boost-Inverter TopologyDocument6 pagesA Compact Single-Phase Bidirectional Buck-Boost-Inverter TopologyIndra PratamaNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Chapter 2Document8 pagesChapter 2nassim.1979No ratings yet
- Calculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaDocument7 pagesCalculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaUrfan AshrafNo ratings yet
- EC6404 Uw PDFDocument354 pagesEC6404 Uw PDFIrfan AzadNo ratings yet
- 2 5472401978556416138 PDFDocument97 pages2 5472401978556416138 PDFZayn AhmedNo ratings yet
- Datasheet en To Es 2024-04-10 02-36-04Document16 pagesDatasheet en To Es 2024-04-10 02-36-04Carlos BetancourtNo ratings yet
- Analog All ExperimentsDocument24 pagesAnalog All ExperimentsdeadpoolinmcuNo ratings yet
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- Exp. - Machine LabDocument3 pagesExp. - Machine LabAbdelrahman MuadiNo ratings yet
- Delta Sigma ADCDocument22 pagesDelta Sigma ADCAlexandre KennedyNo ratings yet
- Integrator and DifferentiatorDocument4 pagesIntegrator and DifferentiatorSANNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- g482 Mod 3 2 3 1 Series and Parallel CircuitsDocument9 pagesg482 Mod 3 2 3 1 Series and Parallel Circuitsapi-236179294No ratings yet
- Application Notes Statek30Document8 pagesApplication Notes Statek30Safix InternationalNo ratings yet
- Electrical Machines - 1 (ELE - 403)Document90 pagesElectrical Machines - 1 (ELE - 403)ApoorvNo ratings yet
- System Loss Reduction: Speaker: Sun, Sang Jin KepcoDocument82 pagesSystem Loss Reduction: Speaker: Sun, Sang Jin Kepcoiskandarn_el5735No ratings yet
- Chapter 3: Oscillators and Waveform-Shaping CircuitsDocument32 pagesChapter 3: Oscillators and Waveform-Shaping CircuitsRuhul Amin LaskarNo ratings yet
- Relay Protection Setting ManualDocument6 pagesRelay Protection Setting ManualMahfuzur RahmanNo ratings yet
- Inverting Configuration:: Linear Integrated Circuits (Ece3013) Lab Digital Assignment 1Document7 pagesInverting Configuration:: Linear Integrated Circuits (Ece3013) Lab Digital Assignment 1Syed FarmaanNo ratings yet
- Three Phase PWM RectDocument13 pagesThree Phase PWM RectMridul MishraNo ratings yet
- Reviewer FinaleDocument15 pagesReviewer FinaleJesslian Agatha RiceroNo ratings yet
- Dc11111 Ac 3 Dc22 MergedDocument20 pagesDc11111 Ac 3 Dc22 Mergedamiramagdi2004No ratings yet
- Signal Flow GraphsDocument20 pagesSignal Flow GraphsNitin BhitreNo ratings yet
- Control Systems: Module: Modelling of SystemsDocument32 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- Synchonous Machine - Fall2023Document64 pagesSynchonous Machine - Fall2023Ali MoharramNo ratings yet
- TransformersDocument15 pagesTransformersabhi_chakraborty12No ratings yet
- E246 - 4 - Team File Submission - Team 2 - 001Document13 pagesE246 - 4 - Team File Submission - Team 2 - 001张瑜征No ratings yet
- Lic 16Document43 pagesLic 16bhavyaNo ratings yet
- Solkor RF: ReyrolleDocument22 pagesSolkor RF: Reyrollerashid rahmanNo ratings yet
- Electrical Engineering DepartmentDocument10 pagesElectrical Engineering DepartmentNicoNo ratings yet
- Analog & Digital Electronics: Course No: PH-218 Lec-13: Multistage AmplifiersDocument17 pagesAnalog & Digital Electronics: Course No: PH-218 Lec-13: Multistage AmplifiersSaiNo ratings yet
- Adib Safwan Bin Hairunizam+201291071Document13 pagesAdib Safwan Bin Hairunizam+201291071LIEW HUI FANG UNIMAPNo ratings yet
- Optical Lab - RECDocument26 pagesOptical Lab - RECGiri KanyakumariNo ratings yet
- A Review of Simulink For Single-Phase RectifierDocument12 pagesA Review of Simulink For Single-Phase RectifierInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungNo ratings yet
- Power System Protection - Part 07Document10 pagesPower System Protection - Part 07shashikant yadavNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Kindergarten Desktop StudyDocument25 pagesKindergarten Desktop Studyfranklin78% (9)
- BPS Standard Form ASME Sec IXDocument1 pageBPS Standard Form ASME Sec IXbalakumar12362No ratings yet
- Lecture Notes 5: Electromagnetic Waves in Vacuum The Wave Equation (S) For E and BDocument33 pagesLecture Notes 5: Electromagnetic Waves in Vacuum The Wave Equation (S) For E and BZhenhua HuangNo ratings yet
- Inspection Gaz. NotificationDocument21 pagesInspection Gaz. NotificationKatuNo ratings yet
- 11 Special Theory of Relativity GreyDocument4 pages11 Special Theory of Relativity Greyapi-3801886No ratings yet
- Corrosion PDFDocument22 pagesCorrosion PDFVishal ThakareNo ratings yet
- Field Strength MeterDocument9 pagesField Strength MeterVinod JagdaleNo ratings yet
- Kobelco Hydraulic Crawler Crane Sl4500r Spec BookDocument6 pagesKobelco Hydraulic Crawler Crane Sl4500r Spec Bookina100% (43)
- Datatool s4 User GuideDocument20 pagesDatatool s4 User GuideFac EbookphantomNo ratings yet
- Turb Fan Aero Engine Market BriefDocument37 pagesTurb Fan Aero Engine Market Briefsunrise_thangNo ratings yet
- LPK 909ex Bs-Iii: (Parts List)Document216 pagesLPK 909ex Bs-Iii: (Parts List)shivamNo ratings yet
- High-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesDocument17 pagesHigh-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesAnonymous qpnZNmchFdNo ratings yet
- 8400 Replacement Parts GuideDocument4 pages8400 Replacement Parts GuideOleksandr YermolenkoNo ratings yet
- Catalog CombinedDocument64 pagesCatalog Combinedflanker_13No ratings yet
- SumitomoDocument170 pagesSumitomoLuis Ruben Torres QuispeNo ratings yet
- Fly Ash in India: From Waste Pollutant To Ecofriendly ResourcesDocument11 pagesFly Ash in India: From Waste Pollutant To Ecofriendly ResourcesNovitaWahyuniDlyNo ratings yet
- Comparison of Monowave and Polywave Transmission and Curing ProfiDocument15 pagesComparison of Monowave and Polywave Transmission and Curing Profidrg. Rifqie Al HarisNo ratings yet
- VSD Panel - PUBL-7796 - 2023 - ENDocument2 pagesVSD Panel - PUBL-7796 - 2023 - ENMuhammad AzriNo ratings yet
- Structure of AtomDocument72 pagesStructure of AtomAditi YadavNo ratings yet
- Pipeline RoutingDocument5 pagesPipeline RoutingSaid Ahmed SalemNo ratings yet
- 600mw Rtps Equipmemt ParametersDocument65 pages600mw Rtps Equipmemt ParametersANOY KUMAR MONDALNo ratings yet
- Fire Protection Standard For Use of Plastic PipesDocument6 pagesFire Protection Standard For Use of Plastic Pipesjonodo89No ratings yet
- Metode Numerik - Tugas 3Document8 pagesMetode Numerik - Tugas 3Annisa SalsabillahNo ratings yet
- Tiger Neo N-Type 60HL4 - (V) : 460-480 WattDocument2 pagesTiger Neo N-Type 60HL4 - (V) : 460-480 WattLucaNo ratings yet
- GS2011Document29 pagesGS2011Priya MehtaNo ratings yet
- 13Document2 pages13Jose Antonio Calderon TassaraNo ratings yet
- Horizontal, Single-Stage, Composite Centrifugal Pump 50 HZ: Grundfos Data BookletDocument16 pagesHorizontal, Single-Stage, Composite Centrifugal Pump 50 HZ: Grundfos Data BookletSaber ElkassasNo ratings yet
- Rel316 4 PDFDocument44 pagesRel316 4 PDFKhaled Galal AhmedNo ratings yet























































































Download as pdf or txt
You might also like
- EV1 SCR Motor ControllerDocument32 pagesEV1 SCR Motor ControllerJShearer95% (20)
- Florida International University College of Engineering and Computing Department of Electrical and Computer EngineeringDocument9 pagesFlorida International University College of Engineering and Computing Department of Electrical and Computer EngineeringAneelaMalikNo ratings yet
- Quality Control Handbook Street LightingDocument36 pagesQuality Control Handbook Street LightingbalaafconsNo ratings yet
- Lecture 10 Exciters and GovernorsDocument55 pagesLecture 10 Exciters and GovernorsManuelNo ratings yet
- Experiment FT2: Measurement of Inductance and Mutual InductanceDocument8 pagesExperiment FT2: Measurement of Inductance and Mutual InductanceWong YuZhengNo ratings yet
- Lesson 9Document49 pagesLesson 9write2arshad_mNo ratings yet
- Lesson9 PDFDocument49 pagesLesson9 PDFmfqcNo ratings yet
- Matlab Differential Protection ModelDocument9 pagesMatlab Differential Protection ModelEntertainment MediaNo ratings yet
- Transfer Fundtion of DC GeneratorDocument5 pagesTransfer Fundtion of DC GeneratorMohammad Haris MNo ratings yet
- Oscillators & Applications LongstreetDocument4 pagesOscillators & Applications Longstreetnapoleon_velasc3617No ratings yet
- u 1 L i 1 s k 1 J 1 s T T ωDocument1 pageu 1 L i 1 s k 1 J 1 s T T ωBpp Ikm KuchingNo ratings yet
- PSC Unit-1 NotesDocument82 pagesPSC Unit-1 NotesSunny BNo ratings yet
- Follow The Class Lectures, Must Read The Following Questions, and Also Follow The Previous Year QuestionsDocument5 pagesFollow The Class Lectures, Must Read The Following Questions, and Also Follow The Previous Year QuestionsRehana Karim TomaNo ratings yet
- 02 Physical Systems Modeling-485Document11 pages02 Physical Systems Modeling-485hhNo ratings yet
- Design An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KDocument21 pagesDesign An Amplifier With A Gain of - 10 and Input Resistance of 10k . Ri 10k Av - Rf/Ri - 10 - Rf/10k RF 10 X 10 K 100 KMangaiyarkarasi VengatachalamNo ratings yet
- Analog Circuit EC 405 OscillatorDocument19 pagesAnalog Circuit EC 405 Oscillatoryashrajput7689No ratings yet
- MEB704 - Mechatronics Semester 1 2023: Derrick CampusDocument8 pagesMEB704 - Mechatronics Semester 1 2023: Derrick CampusDanilo BahorNo ratings yet
- Scheme Eee Unit3 QBDocument35 pagesScheme Eee Unit3 QBMaaz S100% (2)
- ComplDyn Simplex OEODocument5 pagesComplDyn Simplex OEORené Mboyo KouayepNo ratings yet
- Indoor Relay SettingDocument20 pagesIndoor Relay SettingxoxisbroNo ratings yet
- A Compact Single-Phase Bidirectional Buck-Boost-Inverter TopologyDocument6 pagesA Compact Single-Phase Bidirectional Buck-Boost-Inverter TopologyIndra PratamaNo ratings yet
- Transfer Function of D.c.machine Using Generalised Machine TheoryDocument18 pagesTransfer Function of D.c.machine Using Generalised Machine Theorychethan64% (11)
- Chapter 2Document8 pagesChapter 2nassim.1979No ratings yet
- Calculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaDocument7 pagesCalculation and Setting of Relays in Transmission Overhead Lines M. Špes, Ľ. Beňa, M. MikitaUrfan AshrafNo ratings yet
- EC6404 Uw PDFDocument354 pagesEC6404 Uw PDFIrfan AzadNo ratings yet
- 2 5472401978556416138 PDFDocument97 pages2 5472401978556416138 PDFZayn AhmedNo ratings yet
- Datasheet en To Es 2024-04-10 02-36-04Document16 pagesDatasheet en To Es 2024-04-10 02-36-04Carlos BetancourtNo ratings yet
- Analog All ExperimentsDocument24 pagesAnalog All ExperimentsdeadpoolinmcuNo ratings yet
- ELE2101 Mod 4 - Some Control System HardwareDocument54 pagesELE2101 Mod 4 - Some Control System HardwareRavneet kaurNo ratings yet
- Exp. - Machine LabDocument3 pagesExp. - Machine LabAbdelrahman MuadiNo ratings yet
- Delta Sigma ADCDocument22 pagesDelta Sigma ADCAlexandre KennedyNo ratings yet
- Integrator and DifferentiatorDocument4 pagesIntegrator and DifferentiatorSANNo ratings yet
- Fuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitDocument5 pagesFuzzy Logic Control of Synchronous Generator Under The Condition of Transient Three Phase Short CircuitwilliamNo ratings yet
- g482 Mod 3 2 3 1 Series and Parallel CircuitsDocument9 pagesg482 Mod 3 2 3 1 Series and Parallel Circuitsapi-236179294No ratings yet
- Application Notes Statek30Document8 pagesApplication Notes Statek30Safix InternationalNo ratings yet
- Electrical Machines - 1 (ELE - 403)Document90 pagesElectrical Machines - 1 (ELE - 403)ApoorvNo ratings yet
- System Loss Reduction: Speaker: Sun, Sang Jin KepcoDocument82 pagesSystem Loss Reduction: Speaker: Sun, Sang Jin Kepcoiskandarn_el5735No ratings yet
- Chapter 3: Oscillators and Waveform-Shaping CircuitsDocument32 pagesChapter 3: Oscillators and Waveform-Shaping CircuitsRuhul Amin LaskarNo ratings yet
- Relay Protection Setting ManualDocument6 pagesRelay Protection Setting ManualMahfuzur RahmanNo ratings yet
- Inverting Configuration:: Linear Integrated Circuits (Ece3013) Lab Digital Assignment 1Document7 pagesInverting Configuration:: Linear Integrated Circuits (Ece3013) Lab Digital Assignment 1Syed FarmaanNo ratings yet
- Three Phase PWM RectDocument13 pagesThree Phase PWM RectMridul MishraNo ratings yet
- Reviewer FinaleDocument15 pagesReviewer FinaleJesslian Agatha RiceroNo ratings yet
- Dc11111 Ac 3 Dc22 MergedDocument20 pagesDc11111 Ac 3 Dc22 Mergedamiramagdi2004No ratings yet
- Signal Flow GraphsDocument20 pagesSignal Flow GraphsNitin BhitreNo ratings yet
- Control Systems: Module: Modelling of SystemsDocument32 pagesControl Systems: Module: Modelling of Systemsee210002004No ratings yet
- Synchonous Machine - Fall2023Document64 pagesSynchonous Machine - Fall2023Ali MoharramNo ratings yet
- TransformersDocument15 pagesTransformersabhi_chakraborty12No ratings yet
- E246 - 4 - Team File Submission - Team 2 - 001Document13 pagesE246 - 4 - Team File Submission - Team 2 - 001张瑜征No ratings yet
- Lic 16Document43 pagesLic 16bhavyaNo ratings yet
- Solkor RF: ReyrolleDocument22 pagesSolkor RF: Reyrollerashid rahmanNo ratings yet
- Electrical Engineering DepartmentDocument10 pagesElectrical Engineering DepartmentNicoNo ratings yet
- Analog & Digital Electronics: Course No: PH-218 Lec-13: Multistage AmplifiersDocument17 pagesAnalog & Digital Electronics: Course No: PH-218 Lec-13: Multistage AmplifiersSaiNo ratings yet
- Adib Safwan Bin Hairunizam+201291071Document13 pagesAdib Safwan Bin Hairunizam+201291071LIEW HUI FANG UNIMAPNo ratings yet
- Optical Lab - RECDocument26 pagesOptical Lab - RECGiri KanyakumariNo ratings yet
- A Review of Simulink For Single-Phase RectifierDocument12 pagesA Review of Simulink For Single-Phase RectifierInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- L-9 (DK) (Pe) ( (Ee) Nptel)Document36 pagesL-9 (DK) (Pe) ( (Ee) Nptel)Htet AungNo ratings yet
- Power System Protection - Part 07Document10 pagesPower System Protection - Part 07shashikant yadavNo ratings yet
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Fundamentals of Electronics 2: Continuous-time Signals and SystemsFrom EverandFundamentals of Electronics 2: Continuous-time Signals and SystemsNo ratings yet
- Kindergarten Desktop StudyDocument25 pagesKindergarten Desktop Studyfranklin78% (9)
- BPS Standard Form ASME Sec IXDocument1 pageBPS Standard Form ASME Sec IXbalakumar12362No ratings yet
- Lecture Notes 5: Electromagnetic Waves in Vacuum The Wave Equation (S) For E and BDocument33 pagesLecture Notes 5: Electromagnetic Waves in Vacuum The Wave Equation (S) For E and BZhenhua HuangNo ratings yet
- Inspection Gaz. NotificationDocument21 pagesInspection Gaz. NotificationKatuNo ratings yet
- 11 Special Theory of Relativity GreyDocument4 pages11 Special Theory of Relativity Greyapi-3801886No ratings yet
- Corrosion PDFDocument22 pagesCorrosion PDFVishal ThakareNo ratings yet
- Field Strength MeterDocument9 pagesField Strength MeterVinod JagdaleNo ratings yet
- Kobelco Hydraulic Crawler Crane Sl4500r Spec BookDocument6 pagesKobelco Hydraulic Crawler Crane Sl4500r Spec Bookina100% (43)
- Datatool s4 User GuideDocument20 pagesDatatool s4 User GuideFac EbookphantomNo ratings yet
- Turb Fan Aero Engine Market BriefDocument37 pagesTurb Fan Aero Engine Market Briefsunrise_thangNo ratings yet
- LPK 909ex Bs-Iii: (Parts List)Document216 pagesLPK 909ex Bs-Iii: (Parts List)shivamNo ratings yet
- High-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesDocument17 pagesHigh-Efficiency, 2A, 16V, 500Khz Synchronous, Step-Down Converter in A 6-Pin Tsot 23 Description FeaturesAnonymous qpnZNmchFdNo ratings yet
- 8400 Replacement Parts GuideDocument4 pages8400 Replacement Parts GuideOleksandr YermolenkoNo ratings yet
- Catalog CombinedDocument64 pagesCatalog Combinedflanker_13No ratings yet
- SumitomoDocument170 pagesSumitomoLuis Ruben Torres QuispeNo ratings yet
- Fly Ash in India: From Waste Pollutant To Ecofriendly ResourcesDocument11 pagesFly Ash in India: From Waste Pollutant To Ecofriendly ResourcesNovitaWahyuniDlyNo ratings yet
- Comparison of Monowave and Polywave Transmission and Curing ProfiDocument15 pagesComparison of Monowave and Polywave Transmission and Curing Profidrg. Rifqie Al HarisNo ratings yet
- VSD Panel - PUBL-7796 - 2023 - ENDocument2 pagesVSD Panel - PUBL-7796 - 2023 - ENMuhammad AzriNo ratings yet
- Structure of AtomDocument72 pagesStructure of AtomAditi YadavNo ratings yet
- Pipeline RoutingDocument5 pagesPipeline RoutingSaid Ahmed SalemNo ratings yet
- 600mw Rtps Equipmemt ParametersDocument65 pages600mw Rtps Equipmemt ParametersANOY KUMAR MONDALNo ratings yet
- Fire Protection Standard For Use of Plastic PipesDocument6 pagesFire Protection Standard For Use of Plastic Pipesjonodo89No ratings yet
- Metode Numerik - Tugas 3Document8 pagesMetode Numerik - Tugas 3Annisa SalsabillahNo ratings yet
- Tiger Neo N-Type 60HL4 - (V) : 460-480 WattDocument2 pagesTiger Neo N-Type 60HL4 - (V) : 460-480 WattLucaNo ratings yet
- GS2011Document29 pagesGS2011Priya MehtaNo ratings yet
- 13Document2 pages13Jose Antonio Calderon TassaraNo ratings yet
- Horizontal, Single-Stage, Composite Centrifugal Pump 50 HZ: Grundfos Data BookletDocument16 pagesHorizontal, Single-Stage, Composite Centrifugal Pump 50 HZ: Grundfos Data BookletSaber ElkassasNo ratings yet
- Rel316 4 PDFDocument44 pagesRel316 4 PDFKhaled Galal AhmedNo ratings yet