Download as pdf or txt
You might also like
- Checklist 210Document10 pagesChecklist 210Felipe MotaNo ratings yet
- DC Motor Speed ControlDocument54 pagesDC Motor Speed ControlAbhishek Gupta100% (3)
- Frontier 570 Service ManualDocument1,011 pagesFrontier 570 Service ManualJefta Majstorović83% (36)
- Actuators: Dept. of Aerospace Engineering Iit BombayDocument36 pagesActuators: Dept. of Aerospace Engineering Iit BombayMohd Sazli SaadNo ratings yet
- Ijeit1412201203 04Document3 pagesIjeit1412201203 04Edy KurniawanNo ratings yet
- Brushless DC Motor Speed Control System of The Walking Aids MachineDocument4 pagesBrushless DC Motor Speed Control System of The Walking Aids MachineAl-ShukaNo ratings yet
- Microcontrollers For The Drive Train in Hybrid and Electric VehiclesDocument8 pagesMicrocontrollers For The Drive Train in Hybrid and Electric VehiclesHaseebPirachaNo ratings yet
- Electric Drive System (M0113257)Document47 pagesElectric Drive System (M0113257)Eduar Quezada MarcelianoNo ratings yet
- PECED IntroductionDocument44 pagesPECED IntroductionBishnuNo ratings yet
- Power Steering System PDFDocument10 pagesPower Steering System PDFDanistergladwinNo ratings yet
- Introduction To Electrical DrivesDocument11 pagesIntroduction To Electrical DrivesGaurav SrivastavaNo ratings yet
- Advanced Mechatronics SystemsDocument13 pagesAdvanced Mechatronics Systemssaleem razaNo ratings yet
- Machines AssignmentDocument7 pagesMachines AssignmentCharles MuneneNo ratings yet
- Manual Regulador de Velocidade Gac Esd 5111 PDFDocument2 pagesManual Regulador de Velocidade Gac Esd 5111 PDFGugui68100% (1)
- Brake by Wire1Document21 pagesBrake by Wire1AdilNo ratings yet
- Speed Control of Induction Motor Using Fuzzy LogicDocument4 pagesSpeed Control of Induction Motor Using Fuzzy LogicEditor IJRITCCNo ratings yet
- Development of A Microcontoller-Based Motor Speed Control System Using Intel 8051Document6 pagesDevelopment of A Microcontoller-Based Motor Speed Control System Using Intel 8051Nguyễn HòaNo ratings yet
- Subject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseDocument9 pagesSubject Name: Electric Drive Subject Code: 6EE4-05: Introduction: Objective, Scope and Outcome of The CourseAbhíñåv PrâjãpätîNo ratings yet
- Festo Glossary The Terminology of Electrical DrivesDocument3 pagesFesto Glossary The Terminology of Electrical DrivesadityavanamNo ratings yet
- An-9019 Motor Drive System Using SPM InverterDocument25 pagesAn-9019 Motor Drive System Using SPM InverterasokanenNo ratings yet
- DC Motor Speed Control Using PWMDocument14 pagesDC Motor Speed Control Using PWMVincent KorieNo ratings yet
- Vector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseDocument59 pagesVector Control Approach For Switched Reluctance Motor To Mitigate Acoustic NoiseKalyan Reddy AnuguNo ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- Speed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationDocument5 pagesSpeed Control of Permanent Magnet Brushless DC Motor Using Fuzzy Logic Controller-Hardware ImplementationSofyan AhmadiNo ratings yet
- Regenerative Braking of Series-Wound Brushed DC Electric Motors For Electric VehiclesDocument6 pagesRegenerative Braking of Series-Wound Brushed DC Electric Motors For Electric Vehiclesbeastlt12No ratings yet
- Microcontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMDocument4 pagesMicrocontroller Based Closed-Loop Automatic Speed Control of DC Motor Using PWMSphasonke Daniel ZhouNo ratings yet
- Electric Vehicle 4th ModuleDocument13 pagesElectric Vehicle 4th ModuleAmruth DeshpandeNo ratings yet
- Irjet V4i1140 PDFDocument5 pagesIrjet V4i1140 PDFMohamed AhmedNo ratings yet
- BLDC MotorDocument55 pagesBLDC MotorDr. Syed Abdul Rahman Kashif100% (1)
- Intelligent Control of The Regenerative Braking in An Induction Motor DriveDocument7 pagesIntelligent Control of The Regenerative Braking in An Induction Motor Driveafshin keshtkarNo ratings yet
- IDC Unit-4Document9 pagesIDC Unit-4Gaurav SinghNo ratings yet
- Final PDF EditedDocument6 pagesFinal PDF EditedFirdous NaazNo ratings yet
- MSP Buck Regulator Closed LoopDocument4 pagesMSP Buck Regulator Closed LoopMarkoMarkovicNo ratings yet
- Electric Vehicle 4th ModuleDocument19 pagesElectric Vehicle 4th ModuleSimi BaniNo ratings yet
- 15Document5 pages15Mahmoud MaherNo ratings yet
- Artificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodDocument7 pagesArtificial Neural Network Based Controller For Speed Control of An Induction Motor Using Indirect Vector Control MethodAshwani RanaNo ratings yet
- Advanced Control System Lab PDFDocument15 pagesAdvanced Control System Lab PDFarpitg2208No ratings yet
- 19 Speed PDFDocument8 pages19 Speed PDFNur Muhammad DzikriNo ratings yet
- DR Suliman Finalll Paper11 1Document6 pagesDR Suliman Finalll Paper11 1Githma LakshanNo ratings yet
- Power Electronics in Motor Drives: Where Is It?: Nagarajan SridharDocument9 pagesPower Electronics in Motor Drives: Where Is It?: Nagarajan SridharElias CarvalhoNo ratings yet
- Unit 3 ME 609BDocument7 pagesUnit 3 ME 609Bthesidy2003No ratings yet
- Decoupling Network of Field-Oriented Control in Variable-Frequency DrivesDocument5 pagesDecoupling Network of Field-Oriented Control in Variable-Frequency DrivesJoseph NoumbissieNo ratings yet
- Esd5111 enDocument4 pagesEsd5111 enMahdi Dehghankar100% (1)
- FusedDocument71 pagesFusedKali DasNo ratings yet
- I Pues D 1000 Series Data SheetDocument3 pagesI Pues D 1000 Series Data Sheetkhaled kamelNo ratings yet
- Iceets 2013 6533563Document9 pagesIceets 2013 6533563Steni MoaiNo ratings yet
- Permanent Magnet Synchronous Motor Drive System For Mechatronics ApplicationsDocument16 pagesPermanent Magnet Synchronous Motor Drive System For Mechatronics Applicationsan1088No ratings yet
- A Design Method of Pi Controller For An Induction Motor With Par PDFDocument6 pagesA Design Method of Pi Controller For An Induction Motor With Par PDFijazNo ratings yet
- Ramesh 2011Document6 pagesRamesh 2011Hoang Hoang LeNo ratings yet
- Topic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyDocument13 pagesTopic: DC Motor Using Mechanical Application: New Era University College of Engineering and TechnologyMAr Lon Dela CruzNo ratings yet
- EHV - Mod 3Document36 pagesEHV - Mod 3vdjfvhvNo ratings yet
- Separately Excited DC Motor For Electric Vehicle Controller DesignDocument5 pagesSeparately Excited DC Motor For Electric Vehicle Controller DesignThiện HàNo ratings yet
- Modrn Cont IMDocument25 pagesModrn Cont IMNAENWI YAABARINo ratings yet
- Speed Control of BLDC Motor For Electric PDFDocument6 pagesSpeed Control of BLDC Motor For Electric PDFtarnaNo ratings yet
- 1405 6815 PDFDocument7 pages1405 6815 PDFPrashanthSamaNo ratings yet
- AURETD101 - Diagnose and Repair Electronically Controlled Steering SystemsDocument14 pagesAURETD101 - Diagnose and Repair Electronically Controlled Steering SystemsCHANDRASIRI K.H.M.C. (BETA16009)No ratings yet
- Application Induction Motor FOR Water Pumping: OF SolarDocument4 pagesApplication Induction Motor FOR Water Pumping: OF Solararadhyula praveenraju yadavNo ratings yet
- Research On Electric Power Steering With BLDC Drive SystemDocument5 pagesResearch On Electric Power Steering With BLDC Drive SystemJessi MarieNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Modeling and Simulation of BLDC Motor in Electric Power SteeringDocument4 pagesModeling and Simulation of BLDC Motor in Electric Power SteeringJessi MarieNo ratings yet
- Research On Electric Power Steering With BLDC Drive SystemDocument5 pagesResearch On Electric Power Steering With BLDC Drive SystemJessi MarieNo ratings yet
- Brush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsDocument8 pagesBrush-Less DC Motor Drive For Steer-By-Wire Electric Power Steering ApplicationsJessi MarieNo ratings yet
- GK DUBEY Electrical Drive ExamsfreakDocument166 pagesGK DUBEY Electrical Drive ExamsfreakJessi MarieNo ratings yet
- Control de Trasm 410g. 3 PDFDocument2 pagesControl de Trasm 410g. 3 PDFdavidNo ratings yet
- XXXXXXX Boxes and Access Units: For Example Oor Service OutletDocument3 pagesXXXXXXX Boxes and Access Units: For Example Oor Service OutletUmar FaruqNo ratings yet
- EDWARDS 01 Visual SignalsDocument166 pagesEDWARDS 01 Visual SignalsrodrigoarrepolNo ratings yet
- Instruction Manual - Digital Drybath - ENDocument19 pagesInstruction Manual - Digital Drybath - ENAlain ManceraNo ratings yet
- Powador 7700 - 7900 8600 - 9600: OriginalDocument52 pagesPowador 7700 - 7900 8600 - 9600: Originalashraf-84No ratings yet
- Hydraulic Motors: What Is A Hydraulic Motor and Why Do You Need It?Document7 pagesHydraulic Motors: What Is A Hydraulic Motor and Why Do You Need It?Anil NairNo ratings yet
- Summative Test For CHSDocument5 pagesSummative Test For CHSSJ BatallerNo ratings yet
- Recloser PadmountedDocument12 pagesRecloser Padmountedmjbriceno@gmail.comNo ratings yet
- Parts Catalogue: Achiever (Oct, 2005)Document148 pagesParts Catalogue: Achiever (Oct, 2005)Sourabh TiwariNo ratings yet
- Lec 1 DIO BasicsDocument41 pagesLec 1 DIO BasicsRana HeshamNo ratings yet
- Parallel Port MIDI InterfaceDocument6 pagesParallel Port MIDI InterfaceMike ThomsonNo ratings yet
- SK Line 605 Tech SpecDocument2 pagesSK Line 605 Tech Specmohd lopezNo ratings yet
- Commercial Air ConditioningDocument46 pagesCommercial Air ConditioningMohammad SaleemNo ratings yet
- Eti Datasheet 002620011 En-GbDocument6 pagesEti Datasheet 002620011 En-GbAbc ThoiNo ratings yet
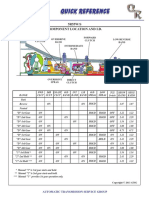
- Quick Reference: 5R55W/S Component Location and I.DDocument7 pagesQuick Reference: 5R55W/S Component Location and I.DAyhan Ümit100% (3)
- SP 226Document32 pagesSP 226victoras21No ratings yet
- NTPC Industrial TrainingDocument55 pagesNTPC Industrial TrainingSudhankar RawNo ratings yet
- DMU 70 Mechanik iTNC530Document74 pagesDMU 70 Mechanik iTNC530tolik19731No ratings yet
- Vaccumm Leakage SensorDocument1 pageVaccumm Leakage Sensormaciasrob100% (1)
- LCD TV SVC Manual PhilipsDocument2 pagesLCD TV SVC Manual Philipsdecom2002100% (1)
- FAS2240Document2 pagesFAS2240Carlos Martinez100% (1)
- Molykote Lubrication Solutions For Mining ApplicationsDocument4 pagesMolykote Lubrication Solutions For Mining ApplicationsProject Sales CorpNo ratings yet
- CNC 3040 800W ManualDocument35 pagesCNC 3040 800W Manual아이디어창작소 도깨비No ratings yet
- 71-20-00 PB 001 Conf 13 - Mounts - Description and OperationDocument4 pages71-20-00 PB 001 Conf 13 - Mounts - Description and OperationJack Poopay SngNo ratings yet
- Piping Class - AG70Document2 pagesPiping Class - AG70Дмитрий Рыбаков100% (1)
- Yale Crane Component - Crane Bridge Kits Thru 5 Ton ManualDocument24 pagesYale Crane Component - Crane Bridge Kits Thru 5 Ton ManualRizky MahendraNo ratings yet
- Ge Stamford Hc444c1Document8 pagesGe Stamford Hc444c1Octavio EdgardoNo ratings yet
- ST-IIIB User ManualDocument47 pagesST-IIIB User ManualPaúl PazmiñoNo ratings yet