Download as pdf or txt
You might also like
- Error Code Explanation - UpsDocument7 pagesError Code Explanation - UpsLeandro Diaz Martinez67% (6)
- Switching Power Supply Design: A Concise Practical HandbookFrom EverandSwitching Power Supply Design: A Concise Practical HandbookNo ratings yet
- AC Vector Drives 1 RevisionDocument26 pagesAC Vector Drives 1 Revisionleo232No ratings yet
- Deternmination IM ParametersDocument26 pagesDeternmination IM ParametersAli AltahirNo ratings yet
- Chapter 5 - Induction MotorDocument26 pagesChapter 5 - Induction MotorarifulNo ratings yet
- Induction Motor PDFDocument26 pagesInduction Motor PDFishak789100% (1)
- Induction Motor 2003Document24 pagesInduction Motor 2003hdrzaman9439No ratings yet
- Polyphase Induction MachinesDocument7 pagesPolyphase Induction Machinespurushg62No ratings yet
- Elx 311 Chap 7 SlidesDocument23 pagesElx 311 Chap 7 SlidesDaniyar SeytenovNo ratings yet
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesDocument63 pagesElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeNo ratings yet
- Chapter 6C - IMDocument18 pagesChapter 6C - IMNour Ziad Ibrahim AlkurdiNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- 3-Ph Induction Motor Upto Circle DiagramDocument36 pages3-Ph Induction Motor Upto Circle DiagramAn00pgadzilla100% (1)
- Induction Motors PDFDocument108 pagesInduction Motors PDFKshitij ShrivastavaNo ratings yet
- Induction Motors: 8.1 What Does One Look Like?Document8 pagesInduction Motors: 8.1 What Does One Look Like?Gnua WazNo ratings yet
- Electrical Machines Laboratory - 2Document7 pagesElectrical Machines Laboratory - 2sanjuNo ratings yet
- Chapter 6B - IMDocument31 pagesChapter 6B - IMNour Ziad Ibrahim AlkurdiNo ratings yet
- Induction Motor QuestionsDocument16 pagesInduction Motor QuestionsOussama SamirNo ratings yet
- 7 - Lecture - Induction MotorsDocument41 pages7 - Lecture - Induction MotorspaurushgodharNo ratings yet
- Chapter 3 - Induction Motor ContDocument37 pagesChapter 3 - Induction Motor ContMuhammadNo ratings yet
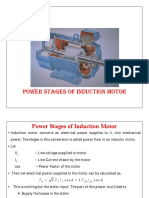
- Power Stages of Induction Motor Power Stages of Induction MotorDocument25 pagesPower Stages of Induction Motor Power Stages of Induction MotorChhaya TiwariNo ratings yet
- Bee Unit4 Lecture2Document7 pagesBee Unit4 Lecture2haiderNo ratings yet
- Em-Ii (Unit-IiDocument111 pagesEm-Ii (Unit-Iiveggalampragathi17No ratings yet
- ISM To Accompany Electric Machinery and Power System Fundamentals 1 - eDocument2 pagesISM To Accompany Electric Machinery and Power System Fundamentals 1 - eLia PalmaNo ratings yet
- Zadatak 1. Trofazna Četvoropolna Kliznokolutna Asinhrona MašinaDocument19 pagesZadatak 1. Trofazna Četvoropolna Kliznokolutna Asinhrona MašinaAA RRNo ratings yet
- Induction Machines - Asynchronous MachinesDocument43 pagesInduction Machines - Asynchronous MachinesMustafa ÖzdemirNo ratings yet
- Slip Torque Characteristics of Induction MotorDocument22 pagesSlip Torque Characteristics of Induction MotorSree ShobhaNo ratings yet
- Induction MotorDocument39 pagesInduction MotorSaneer M SaliNo ratings yet
- Eee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Document29 pagesEee3091F: Energy Conversion Induction Machines II (Chapter 5 - PC Sen)Yousuf IsaacsNo ratings yet
- Lecture Note - ED - Speed Control of IMDocument5 pagesLecture Note - ED - Speed Control of IMsashaikhNo ratings yet
- Control of AC Drives: 1. Equivalent CircuitDocument20 pagesControl of AC Drives: 1. Equivalent CircuitrajeshNo ratings yet
- Exp MachinesDocument8 pagesExp MachinesAngelina JolieNo ratings yet
- EDCM2Document19 pagesEDCM2yanith kumarNo ratings yet
- Speed Control 3-Ph IMDocument5 pagesSpeed Control 3-Ph IMuttamNo ratings yet
- Speed Control 3-Ph IMDocument5 pagesSpeed Control 3-Ph IMuttamNo ratings yet
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperDocument5 pagesHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggNo ratings yet
- Power Lab A2Document5 pagesPower Lab A2simango4No ratings yet
- Experiments EMS IIDocument117 pagesExperiments EMS IIOsama Tahir100% (1)
- Induction MotorDocument6 pagesInduction MotorMuhamad NafianNo ratings yet
- Soal UTS 2017Document6 pagesSoal UTS 2017Kukuh WidarsonoNo ratings yet
- Induction Motors 2 2020Document15 pagesInduction Motors 2 2020Jonathan ArturoNo ratings yet
- Induction MotorDocument39 pagesInduction MotorAhmed MagdyNo ratings yet
- 3-ph Induction Machine - 14.04.2024Document43 pages3-ph Induction Machine - 14.04.2024akashtiwariakuNo ratings yet
- KKMNDocument5 pagesKKMNKATY LISBETH MOROCHO GUACHONo ratings yet
- ECE325 6-InductionMotors 2Document8 pagesECE325 6-InductionMotors 220071a0297No ratings yet
- EE6365-Electrical Engineering Lab ManualDocument95 pagesEE6365-Electrical Engineering Lab ManualAishwayaNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Load Test On DC Shunt MotorDocument6 pagesLoad Test On DC Shunt MotorParth PatelNo ratings yet
- To Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Document11 pagesTo Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Soumya Ranjan NayakNo ratings yet
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDocument32 pagesCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNo ratings yet
- Polyphase Induction Machines: Principle of OperationDocument10 pagesPolyphase Induction Machines: Principle of OperationPrakash KumarNo ratings yet
- M.A.M School of Engineering TRICHY - 621 105Document97 pagesM.A.M School of Engineering TRICHY - 621 105Preethi RanganathanNo ratings yet
- Mho Relay ExperimentDocument10 pagesMho Relay Experimentbt21eee122No ratings yet
- Oscillators & Applications LongstreetDocument4 pagesOscillators & Applications Longstreetnapoleon_velasc3617No ratings yet
- Electric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyDocument33 pagesElectric Drives: An Electric Drive Is A System That Converts Electrical Energy To Mechanical EnergyNithin Mohan91% (11)
- Exercises in Electronics: Operational Amplifier CircuitsFrom EverandExercises in Electronics: Operational Amplifier CircuitsRating: 3 out of 5 stars3/5 (1)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Tacmina Motor SXDA1Document12 pagesTacmina Motor SXDA1arisqi wahyuNo ratings yet
- Weg w50 Three Phase Electric Motor Technical Catalogue European Market 50044032 Brochure English 140418135057 Phpapp02Document48 pagesWeg w50 Three Phase Electric Motor Technical Catalogue European Market 50044032 Brochure English 140418135057 Phpapp02Yashiro AlvaradoNo ratings yet
- Aurorainstaller SW ManualDocument15 pagesAurorainstaller SW ManualMilorad RumenicNo ratings yet
- NABCEP-PV Installation Professional Job Task AnalysisDocument20 pagesNABCEP-PV Installation Professional Job Task AnalysisRenata SiabatoNo ratings yet
- High Speed Elevators (TIME & SPACE) (200712)Document15 pagesHigh Speed Elevators (TIME & SPACE) (200712)Arky HarkyanNo ratings yet
- Instrumentation Oil and GasDocument22 pagesInstrumentation Oil and GasNagaraja SNo ratings yet
- 3 G 3 JVDocument48 pages3 G 3 JVGeorgiana DumitracheNo ratings yet
- Mitsubishi UPS - Owners Manual 98AB SMS V20Document67 pagesMitsubishi UPS - Owners Manual 98AB SMS V20Marcelo BenacchioNo ratings yet
- HAL Placement Paper Question Paper 20197Document12 pagesHAL Placement Paper Question Paper 20197Mukesh KumarNo ratings yet
- Pure Sine PowerVerter Flyer enDocument2 pagesPure Sine PowerVerter Flyer enRedingtonValueNo ratings yet
- Certificados InversoresDocument18 pagesCertificados InversoresPiloto PelotaNo ratings yet
- Chloride 80-NET: UPS CatalogueDocument36 pagesChloride 80-NET: UPS CataloguesaidazzNo ratings yet
- PV3500 Series 4-12KW MPPTDocument4 pagesPV3500 Series 4-12KW MPPTAra AkramNo ratings yet
- Daikin Super Multi Plus Brochure PDFDocument23 pagesDaikin Super Multi Plus Brochure PDFRohan BagadiyaNo ratings yet
- Presentacion Unipower InglesDocument23 pagesPresentacion Unipower IngleschuckreyesNo ratings yet
- Isolated Redundant vs. Parallel Redundant ConfigurationDocument4 pagesIsolated Redundant vs. Parallel Redundant Configurationdrastir_777No ratings yet
- G120 CU250S2 Op Instr 0917 en-USDocument538 pagesG120 CU250S2 Op Instr 0917 en-USJovica ČukuranovićNo ratings yet
- Ac200 SeriesDocument86 pagesAc200 Serieswenceslao chupitapeNo ratings yet
- Quotation 30 KW Hybrid - MR UmerDocument1 pageQuotation 30 KW Hybrid - MR UmerMuhammad Furqaa9rsh. e0v22gn v 9No ratings yet
- Sinamics G110 - SiemensDocument28 pagesSinamics G110 - SiemensArquimedes PaschoalNo ratings yet
- Technical Note On Integrated Power Supply System IPS For Indian RailwaysDocument70 pagesTechnical Note On Integrated Power Supply System IPS For Indian Railwaysrkr_123No ratings yet
- Power Pack DC40 ManualDocument22 pagesPower Pack DC40 ManualBoris KalachnikovNo ratings yet
- Inversor Monofasico Puente Completo PDFDocument3 pagesInversor Monofasico Puente Completo PDFDavid Maldonado PerrusquiaNo ratings yet
- Herong Electric Co - LTD 2017Document60 pagesHerong Electric Co - LTD 2017Zhen SinNo ratings yet
- Daikin EC Fan BrochureDocument2 pagesDaikin EC Fan Brochurewayhoong lamNo ratings yet
- Question Paper Winter 2019Document3 pagesQuestion Paper Winter 2019ELECTRICAL DEPARTMENTNo ratings yet
- Lab Manual - Power ElectronicsDocument6 pagesLab Manual - Power Electronicsprisoner90No ratings yet
- BRD - Klee-Active Brief ManualDocument40 pagesBRD - Klee-Active Brief ManualKaushal BhadoriyaNo ratings yet
- Course Title: Power Electronics Course Code: ELEC304 Credit Units: 5 Level: UGDocument3 pagesCourse Title: Power Electronics Course Code: ELEC304 Credit Units: 5 Level: UGShivansh BhardwajNo ratings yet